A380登机桥新型稳定装置的开发
2014-02-10 07:02胡克明
机电工程技术 2014年7期
胡克明
(蒂森克虏伯机场系统(中山)有限公司,广东中山 528437)
A380登机桥新型稳定装置的开发
胡克明
(蒂森克虏伯机场系统(中山)有限公司,广东中山 528437)
通过四轮行走的支腿方式探索、现有技术的各种支腿结构的分析,为A380登机桥设计了全新的凸轮稳定装置,其结构简单、自重轻,经机场的实际运行,证明可达到稳定A380登机桥的目的。
A380登机桥;稳定装置;支腿;辅助支撑
0 前言
登机桥的行走机构承担着大部分登机桥的负荷并带动登机桥移动完成接泊飞机功能。普通登机桥行走机构如图1所示,通常由圆柱支承、轮架、行走轮等组成,这种设计具有结构简单、运动灵活等特点,而广泛被采用。但因外形呈哑铃状,其中间的圆柱支承与行走轮架之间采用铰接,整体上构成为对登机桥中部铰接式单点支撑,通道水平位置保持仅靠通道后部的两个铰接座实现,普通登机桥因高度不是太高,登机桥的稳定性可得到满足。
但A380登机桥的高度远大于普通桥,且更长一般达40多米,由三个通道及多组滚轮构成能伸缩结构,以及通道升降机构都是较大的焊接结构件构成,精度不高,必须有较大的配合间隙,来保证运动的灵活性,加之较大高度和长度造成受到外力时产生的弹性变形也会大些。所以这种铰接单支承的行走机构的A380登机桥在接泊飞机时,会出现晃动现象,给旅客造成安全上心理压力。
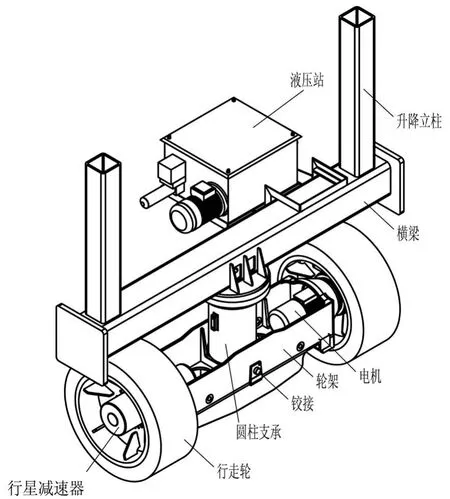
图1 通用登机桥行走机构
1 解决方案
方案一:四轮支撑结构
花了不少人力和物力进行了新的结构设计并进行了研制。曾设计、试制了四轮支撑方式来增强了登机桥的稳定性。行走装置,包括轮架、二个行走轮、二个转向电机和二个转向减速机;还包括一个从动轮系;行走轮设置在主轮架的前部,从动轮系设置在底盘的后部。转向机构也采用过四个油缸及链条与链轮来实现转向功能的结构。
因采用四轮支撑,登机桥的整体稳定性好,但转向机构采用电动需大减速比的行星减速器,国外客户常要求用进口品牌,成本太高,而采用液控方式,增加了四个油缸,液控系统变动很大,整个液压系统要重新设计制造。
四轮支承方案中的两驱动轮的转向需进行同步控制,其控制程序不仅要考虑两个行走轮的转速、方向,还要与两个转向驱动配合,且两个转向驱动的转角需协调,这样控制软件的算法很复杂,造成控制系统也复杂,降低了可靠性,如用来对已在机场的登机桥进行改造,工程量将相当大,周期长,除了登机桥的通道、接机口不变,整个行走机构、升降机构、控制系统、液控系统及液压站都要重新做,成本是相当高。
方案二:增加稳定装置
传统的行走机构由圆柱支撑、轮架、行走轮及驱动电机和行星减速器组成,每个电机均由变频器驱动,带动行走轮转动。两个电机不同的正转与反转的组合方式,就可完成登机桥向前、向后或向左、向右运动的功能,这样结构和控制都简单,经不断探索,认为还是用两轮支承加类似支腿形式妥当,现有支腿按结构有蛙式支腿、H型支腿、X型支腿和辐射型支腿,结合到登机桥使用状况,如有双桥位、服务梯等情况的制约,支腿跨度不能太大,有些在已有登机桥专利的圈地范围内。只能创新设计出全新“支腿”。
经对各种方案进行斟酌,从中确定了不会与现有专利冲突的A380登机桥稳定装置方案,在进行试制同时,并申报了专利[1],并得到了批准。此稳定装置外观如图2所示。
2 方案介绍
(1)机械部分组成及零部件设计
稳定装置机械部分主要由:联接法兰、稳定装置本体、减速机、尾轴带手柄电机、驱动轴、凸轮、双金属轴承、定位螺钉、安全护圈等组成,稳定装置构成如图3所示。

图2 稳定装置外观示意图
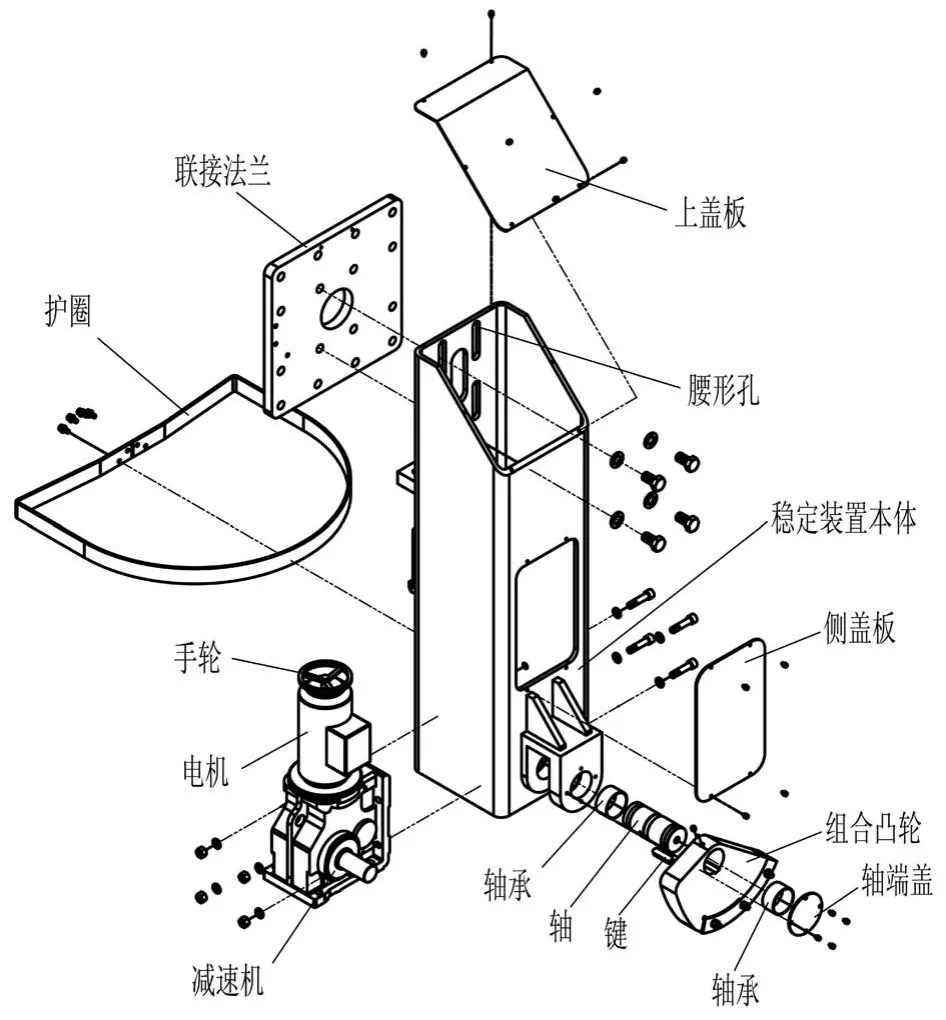
图3 稳定装置构成图
联接法兰与装置本体用螺栓连接,联接孔是腰形孔,因为登机桥在结构上,保证不了横梁能处于水平状态,桥体难免有一定的倾斜,加之机坪坡度不规则,所以稳定装置本体在高度方向需要有一定调节范围。
在后期产品中,还加长了腰形孔,腰形孔方便了高度调节,这样联接强度不易保证。为了稳定装置能牢固、可靠地固定在升降行走机构的横梁侧面,在本体的侧面焊接有螺纹板,装两螺M30的螺钉,顶在横梁的端部法兰上,用来承受地面的反作用力。本体方管上部开了大倒角,方便调节、固定本体离地面的高度,并配有防护盖板。
减速机内藏在本体方管中,初样是采用带有自锁功能的蜗轮蜗杆减速器,但考虑到可能受到较大载荷而损坏,后改为减速比大、结构紧凑、传递扭矩大、效率高的斜齿轮-螺旋锥齿轮减速机,制动力由电机尾部盘式制动器来提供。
轴承初选滚动轴承,考虑可能的承载,尺寸将很大,而实际使用是处于低速摆动运动,且时间很短。为此改为广泛使用于矿山机械、汽车、建筑机械、轧钢机械等的双金属滑动轴承,它是以碳钢为基体,表面烧结铜铅锡锌粉,适用于高载低速下的旋转、摇摆运动,铜粉面加工有油孔。其静承载250 N/mm2,动承载140 N/mm2。
凸轮的支承方式可采用单边支承结构,这样凸轮可360度旋转,可调节的高度范围大,但因轴处于悬臂状态,零件受力不平衡。因此采用了凸轮两边用轴承支承的结构形式,调节范围通过合理设计凸轮的轮廓曲线来保证。
凸轮外形曲线开始设计时,参考标准[2]中4.9.3机坪坡度,机坪纵、横坡度应能防止其表面积水,并在符合排水要求的条件上,尽可能平坦。飞机机位部分的最大坡度宜不大于0.8%。由此凸轮曲线整段设计成触地工作段。
在机场试装时,原凸轮曲线一般是可应付符合标准的机坪坡度进行使用,但有条桥要通过一个凸出油井盖有困难,因油井盖造成调节难度大,如图4所示。
考虑到机坪有可能出现异常状况,提高登机桥的通过性,对凸轮的曲线进行了合理分配,重新设计时,将凸轮摆动的角度范围分成三段,即行走段、过渡段和触地工作段。按需要对曲线进行合理规划,处于行走段时,凸轮距地面距离尽可能高,以提高登机桥的通过能力;处于触地工作段时,凸轮受到的地面反作用力F应尽可能靠近凸轮转轴的轴心,以提高稳定装置的承受负荷能力。理论上地面的支反力F越近轴心的,稳定装置的承载力能力迅速增加,但需要的曲线长度也随之增加,需合理取舍。经综合考虑,做出凸轮工作廓线分配规划图,再对得到的凸轮廓线进行简化调整,改进后凸轮曲线如图5所示。

图4 机坪面凸起油井盖形成障碍

图5 凸轮工作廓线设计

图6 组合凸轮
组合凸轮结构如图6所示。触地工作段采用可更换耐磨尼龙块的嵌合形式,尼龙块有一定的弹性能起缓冲作用,避免刚性的钢铁与机场水泥地面碰触而损坏机坪。按新设计的凸轮在机场更换后,经使用验证,凸轮外形能满足行走时的通过性能,也能较好起到稳定桥的作用。
凸轮轴既要与减速机输出轴联接,又要带动凸轮转动,为简化结构,凸轮轴设计成了中空形式,并在轴上开有油槽,用于储存油脂,利于润滑,中心螺孔用于拆卸。
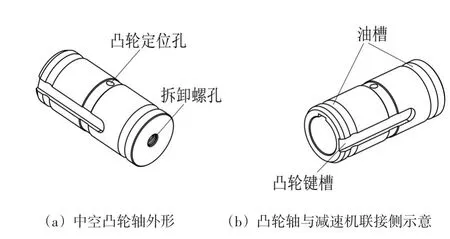
图7 中空凸轮轴外形图
当发生紧急情况、登机桥出现故障(如出现控制系统、驱动电机损坏等其他意外)或停电的情况下,机场通常要求在2分钟内将登机桥退回2~3米,确保登机桥能安全撤离飞机,不致延误航班。因此有手动退桥的要求,为此定制的电机带尾轴,并配有手轮。当要手动退桥时,先将本体方管上的侧盖板取下,按电机上标识释放制动器手动释放螺钉,由人工盘动电机尾部的手轮,使凸轮脱离接触地面,再通过手动退桥装置就能实现手动退桥功能。如图8所示。

图8 手动凸轮抬起功能示意
(2)工作原理
原有液压支腿用的油缸,推力较大,在接机撑起时,可像汽车吊的液压支腿那样,将登机桥撑起来,支腿可承受登机桥的全部或大部分的负荷。而新设计的凸轮稳定装置,只是在停桥接泊飞机时,通过转动凸轮将稳定装置与机坪的空间距离填上,相当于在通道两边垫上垫块,这样登机桥在接机时就不会晃动,登机桥负荷主要是作用在两个行走轮上的,稳定装置只起防止登机桥摇晃的作用。
稳定装置中的电机和减速器起的功能相当于接机时将两块垫块垫上,阻止桥摇动,要行走时再将垫块撤除的作用,所以电机的功率可较小,配的减速器尺寸也不大,能设计在方管内,这样整个装置可做得较轻巧、美观。
稳定装置工作原理如下。
登机桥行走时,将凸轮回收:控制系统发出凸轮收回指令,反转接触器触点闭合,凸轮向上摆动到达限位位置,被堵转,这将导致电机负荷迅速增大,流过电机的电流也随之增大,电流采样信号与电流设定值进行比较。当电流大于过流调节旋钮设定值时,中心控制电路输出信号使内置继电器动作、电子过流继电器迅速动作,使得反转接触器触点断开,电机停止转动,此时凸轮处于回收状态。
登机桥行走到接机位时,使凸轮触地:发出凸轮触地指令,凸轮正转接触器触点闭合,凸轮摆动并接触地面并被堵转,同理,经电子过流继电器控制,使得正转接触器触点断开,电动机供电被切断,同时使电机制动器得电,保持凸轮触地状态,此时稳定装置处于工作状态。
因登机桥本身及机场地面有一定坡度等原因,会造成两边凸轮距地面的距离不同,有时差别还较大,使得凸轮着地时的转角会不一致,即使同时转动,凸轮也不会同时着地,故两边凸轮是分别由两个电子过流继电器控制,从而能保证两边的凸轮都可靠触地,这样凸轮稳定装置就可实现稳定登机桥的功能,保持登机桥在旅客通行、或受到风载时不会出现摇晃现象。
凸轮触地的角度不会一致,但凸轮回收状态位置可设定,故可用接近开关等作回收位置的限位。接近开关属于一种有开关量输出的位置传感器,电感式接近开关由LC高频振荡器和放大处理电路组成,当金属凸轮在接近这个能产生电磁场的振荡感应头时,使凸轮内部产生涡流。这个涡流反作用于接近开关,使接近开关振荡能力衰减,内部电路的参数发生变化,由此识别出有无金属物体接近,进而控制开关的通或断。这样回收位置检测可用电感式接近开关代替电子过流继电器,如图9所示。
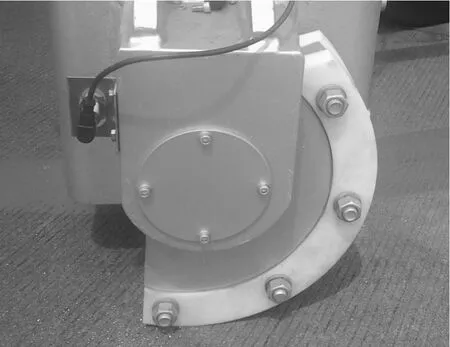
图9 电感式凸轮限位
凸轮式登机桥辅助稳定装置,电缆、电机、减速器动力系统内藏于方管内,外形简洁,与原来的液压辅助支撑安装方式一样,与登机桥组装方便、改造工作量小,外形整体感协调。如图10所示。

图10 A380登机桥稳定装置与行走机构
改造只需将原液压辅助支撑及相关液控管路等拆下来,用堵头封住液压站上的原液压支撑的出油口,用联接螺钉将稳定装置联上,接好电源及控制线路等,调整好高度,功能调试后即完成改造。通过改造后的A380登机桥投入了正常使用。改造后功能性测试及处于接机工作状态的A380登机桥如图11,图12所示。

图11 带稳定装置A380登机桥在测试中

图12 带稳定装置A380登机桥接泊飞机

图13 A380登机桥液压原理图比较
国外机场有的为了环保,要求使用机电桥,即整个登机桥的驱动都不能使用液压系统,对此凸轮稳定装置可直接与机电升降机构以及机电行走机构组成全机电的登机桥。即使是新生产的A380登机桥使用该机电稳定装置,其因可较大简化液压系统,如图13所示,(a)为带液压支撑的A380登机桥液压原理图,(b)为采用A380登机桥凸轮稳定装置的液压原理图,其性价比比液压支腿或四轮结构也有很大的优势。
[1]胡克明,符平宣,牛福维.一种登机桥稳定装置[P].中国专利:201320007563.4.
[2]民用机场飞行区技术标准[S].UDC中华人民共和国民用航空行业标准MH5001-2006.
The Development of New Type of Stable Device for A380 Boarding Bridge
HU Ke-ming
(Thyssenkrupp Airport System(Zhongshan)Co.,Ltd,Zhongshan528437,China)
By exploring the Four-wheel structure,and analyzing the existing various outrigger,design a new cam stabilization device,for the A380Boarding bridges.It has a simple structure,light weight characteristics.Through the actual operation on airport,show the ability to achieve the goal to stabilize the A380 boarding bridge.
A380 boarding bridge;stable device;outrigger;auxiliary support
TU248.6
B
1009-9492(2014)07-0145-06
10.3969/j.issn.1009-9492.2014.07.042
胡克明,男,1963年生,江西南昌人,大学本科,工程师。研究领域:旅客登机桥持续改进。
(编辑:王智圣)
3 结束语
2014-01-15
稳定装置从申报专利时的方案,到初样,通过功能性验证发现一些设计缺陷、制造问题,现场组装调试反馈的意见、客户的要求,也为设计改进提供了第一手资料。经深入思考,对结构、零部件作较大的改变、改良,增加手动功能等,这些说明新产品试验验证是产品开发极为重要的一环,任何设计都要经过不断改进来完善。通过国内、外机场的使用,证明A38登机桥新型稳定装置能满足功能要求,得到了客户认可。
猜你喜欢
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
西安航空学院学报(2020年5期)2020-12-08
港口装卸(2020年3期)2020-06-30
现代营销·理论(2019年10期)2019-09-10
物联网技术(2018年4期)2018-05-15
体育时空·上半月(2017年4期)2017-05-05
东西南北(2017年1期)2017-02-22
振动与冲击(2014年9期)2014-09-05