
探雷声纳增益参数自适应调整仿真
2014-04-24 08:09胡瀚文许炎义姜可宇
指挥控制与仿真 2014年3期
胡瀚文,许炎义,姜可宇
(海军工程大学,湖北 武汉 430033)
探雷声纳属于一种图像声纳。水雷探测的主要背景干扰是海底混响,当水雷目标回波足够强时,可以从混响背景图像中观察到水雷目标亮点,为进一步的目标辨识或水雷规避提供信息[1]。在探雷声纳的工作量程内,海底混响随距离的变化非常剧烈[2],而受模数转换位数的限制声纳信号动态范围一般不是很大,需要操作人员根据给定量程的声纳图像情况调节前置放大器的放大倍数以及时间增益参数等,将声纳信号调整到合适的动态范围内,并且前后距离上的图像亮度差别不是很大,否则混响背景图像会表现得过亮或过暗,不利于操作人员根据声纳图像辨识疑似水雷目标。
在改变探雷声纳工作量程或海底深度变化时,操作人员需要频繁改变声纳的时控增益和手控增益等参数,以提高声纳图像质量,便于操作人员辨识水雷。频繁调整声纳工作参数,一方面会增加操作人员工作负担,另一方面会转移操作人员辨识水雷目标的注意力,从而耽误水雷目标的发现。水下无人航行器(UUV)作为反水雷作战的重要力量,具有隐蔽性好、安全性高、智能化程度高等特点[3],其携载探雷声纳增益参数的调整也必然要求自动调节。因此,实现探雷声纳时控增益和手控增益的自动调节,有利于提高扫雷舰部队对于水雷的辨识水平。
1 探雷声纳增益控制模型
探雷声纳增益控制环节包括手控增益和时控增益两个工作参数。其中手控增益调整的是声纳前置放大器的放大倍数,会影响声纳图像的整体亮度。根据接收机的动态范围和混响强度动态范围,手控增益可设若干个等级,相邻等级之间的放大倍数一般相差3dB。
时控增益曲线表示对不同距离信号给予不同的放大倍数。由于混响强度往往呈指数衰减,因此在一定距离范围内,时控增益呈指数增长。当距离增加到某个临界距离时,混响级衰减到与海洋环境噪声级相当,大于临界距离后,声纳的主要背景干扰是海洋环境噪声,而短时间内海洋环境噪声级是不变的,因此一定距离之后时控增益保持不变。总之,当表示放大倍数的纵轴取对数时,小于临界距离的时控曲线为一定斜率的线段,大于临界距离的时控曲线为一水平线段。如图1所示,为适应不同海洋环境下不同混响衰减速度的需要,探雷声纳往往设计有多条时控增益曲线。选择其中一种与混响衰减速度最匹配的时控增益曲线,可使信号强度调节到一个相对稳定的大小。时控增益参数与手控增益参数的联合调节,可使显示出来的声纳图像前后距离上的亮度相差不大,这样有利于发现图像中可能存在的疑似水雷目标。图1表示的是探雷声纳的3条时控增益曲线,时控1、时控2、时控3分别对应混响衰减慢、中、快三种类型[4]。
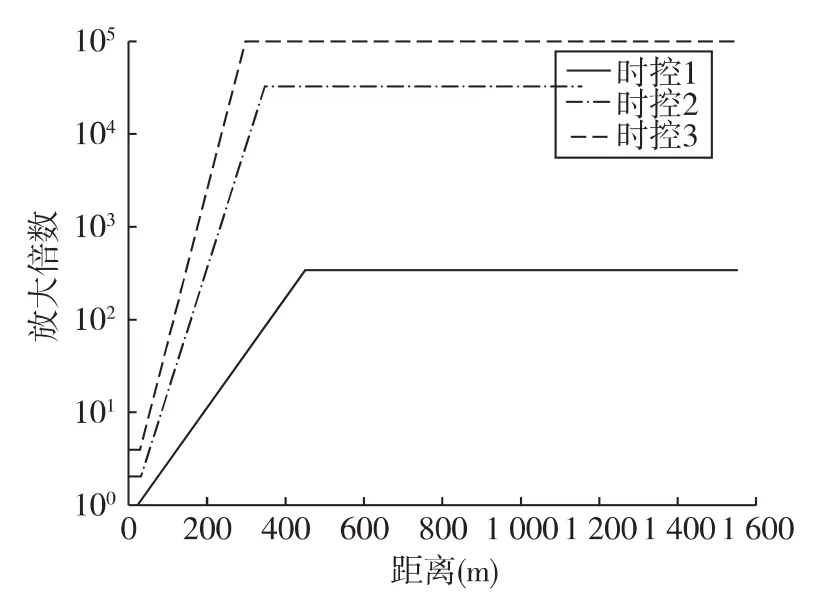
图1 时间增益控制曲线
2 声纳图像显示效果评估
根据显示的需要,声纳送显数据一般会量化成2n个等级,如256级。由于声纳图像质量是人的一种主观感觉,因此难以从理论上给出具体的分析。图2为一幅比较理想的声纳图像,亮度适中,前后对比反差小,便于水雷目标的辨识。
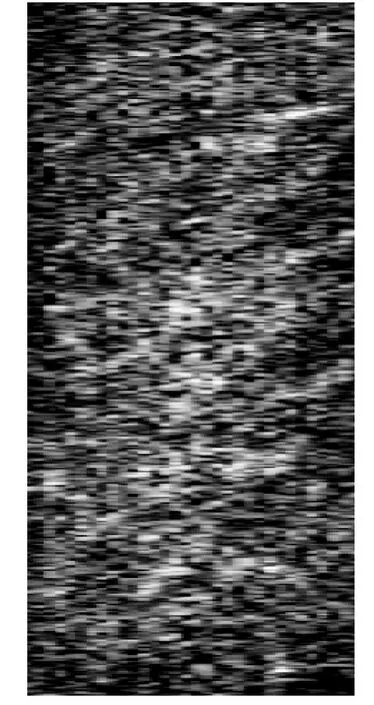
图2 典型声纳图像
下面定义评价声纳图像是否有利于水雷目标辨识的两个指标,即声纳图像的亮度和对比度。
2.1 声纳图像亮度
尺寸为M×N的声纳图像亮度定义如下:

式中,Pij为第i行第j列的声纳显示数据。图像亮度太大或太小,都不利于图像中小目标的辨识。
2.2 声纳图像的对比度
由于混响强度随距离呈指数衰减,在无时控增益的情况下,声纳图像在近距离上的亮度会较强,而远距离上的亮度会较弱,在时控增益曲线选择不合适的情况下,声纳图像在近距离和远距离上的亮度会相差较大,通过手控增益的调整无法达到合适的声纳图像效果。
假设以声纳图像距离维上第i个元素为分界点,将声纳图像分为前后两部分,则此时的声纳图像对比度定义为


式(3)表示分界点在声纳图像中间段范围内取值时以对比度的极大值作为整幅声纳图像的对比度。如果在对比度分析段内没有出现极大值,则以对比度曲线ρi斜率最小值对应的对比度值作为整幅声纳图像的对比度。该对比度反映了声纳图像亮度在远近距离上的一致程度。
2.3 理想声纳图像的标准
通过对大量声纳图像(图像幅值按256级量化)的观察,可以发现便于水雷目标辨识的声纳图像在统计特性上具有如下共同的特点:
1)声纳图像亮度在25至50之间;
2)声纳图像对比度在0.6至1.6之间。
符合以上两个条件的声纳图像整体亮度适中,前后亮度差异不大,比较有利于水雷目标的辨识。图2显示声纳图像的亮度和对比度分别为30.7和1.1,符合上述条件。本文将以此为依据,对探雷声纳增益参数的自适应调整方案进行研究。
3 声纳增益参数自适应调整方案及其检验
3.1 声纳增益参数自适应调整过程
声纳增益参数自适应调整的过程如下:
1)计算当前声纳图像的亮度和对比度;
2)根据这两个指标的大小情况,选择其中一个参数,计算参数调整偏差量;
3)重新生成声纳图像,完成声纳图像的调整。
在第二步中,有两个问题需要解决:一是选择手控增益和时控增益两个参数中的哪一个进行调整;二是如何进行相应的调整。
由于图像对比度的计算要求声纳图像大部分的幅度值都在0~255的显示范围内,否则可能估计不准确,因此首先考察图像的亮度,然后考察图像的对比度。声纳增益参数自适应调整步骤如图3所示。其中a,b和c,d分别为便于水雷目标辨识的声纳图像亮度和对比度指标范围的上下限,取值分别为25、50、0.6、1.6。
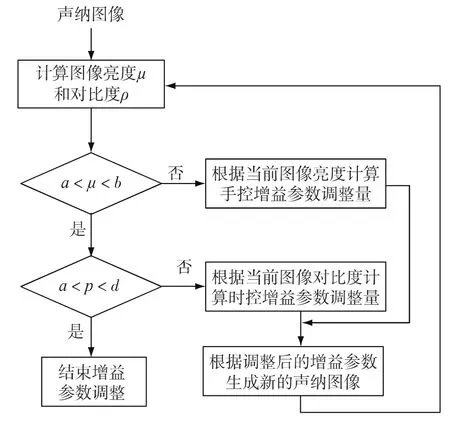
图3 声纳增益参数自适应调整流程图
3.2 手控增益参数调整量计算
手控增益参数的调整一般是在预先设计的若干个增益档位之间选择,相邻两档之间的增益一般相差3dB。因此,手控增益向上或向下每调整一档,声纳图像的亮度将变成原来的两倍或一半。手控增益档位调整量的计算式如下:
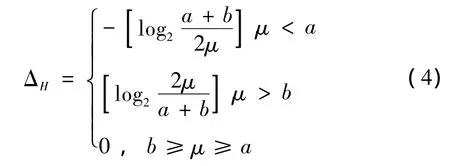
其中,[·]表示按四舍五入取整。
3.3 时控增益参数调整量计算
图1中三条时控增益曲线在200m~500m之间的某个距离上均存在一个拐点,在拐点之后的距离上,探雷声纳背景干扰一般主要为海洋环境噪声,时控增益保持不变,因此当声纳图像的观察范围在400米以上时,时控增益参数调整的意义不大。下面重点讨论观察范围在500m以内时时控增益参数调整量的计算。
如图1所示,假设三条时控增益曲线的序号表示为i,取值分别为1、2、3。时控增益参数可按式(5)来调整:
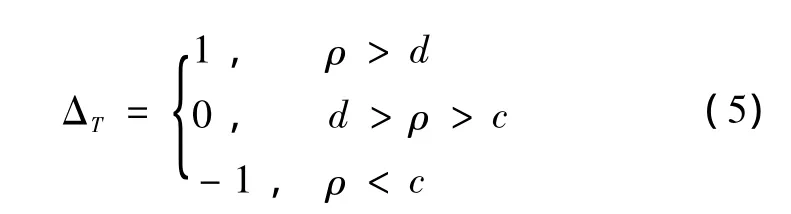
需要指出的是,如果调整后的时控增益曲线序号超出了取值范围,则时控增益参数维持不变。
3.4 声纳增益参数自适应调整检验
为了检验声纳增益参数自适应调整的有效性,根据实际声纳技术参数和设定的海洋环境参数等仿真产生声纳图像[5-6],在图像中间位置模拟了一个目标亮点。
探雷声纳图像仿真的初始及自适应调整过程中的增益参数如表1所示。序号1对应的各个参数表示初始图像的情况,亮度明显太弱,对比度也偏大,难以观察到目标亮点的存在,仿真声纳图像如图4(a)所示。经过第一次增益参数调整后,亮度已符合要求,但对比度仍然太大,经过第二次增益参数调整后,亮度仍然符合要求,对比度已接近可接受区间的上限1.6,由于时控增益已不能继续向上调整,因此结束声纳图像的自适应增益调整过程,最终的声纳图像如图4(b)所示,图中目标亮点由椭圆圈出。图像亮度和对比度比较合适,目标亮点突出,达到了增益参数调整的目的。
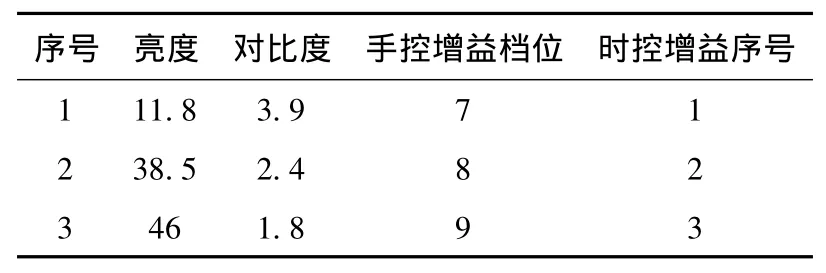
表1 声纳图像增益参数调整表
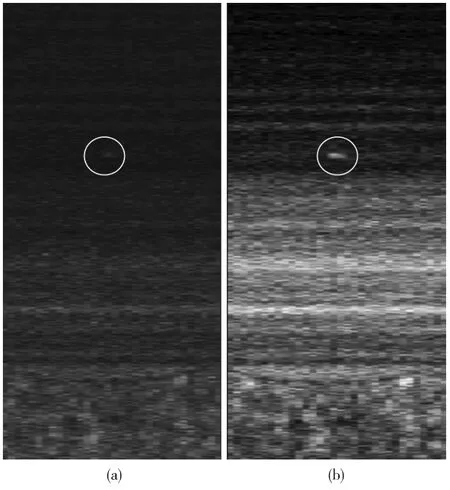
图4 增益参数调整前后对比图像
对于实际探雷声纳图像增益参数的自适应调整,必须持续监控声纳图像的亮度和对比度这两个指标,一旦发现它们偏离可接受范围,且存在进一步调整的空间,则及时进行调整。
4 结束语
针对探雷声纳操作过程中手控增益和时控增益参数调整繁琐,不利于操作人员集中注意力辨识水雷目标的问题,本文设计了这两个增益参数的自适应调整方案。对仿真探雷声纳图像处理的结果表明,该自适应调整方案可以在少数几次的参数调整后,达到比较适于水雷目标观察的图像状态,图像亮度和对比度适中。
[1]刘梦庵.水声工程[M].杭州:浙江科学技术出版社,2002:343-345.
[2]王德石,译.实用声纳工程[M].北京:电子工业出版社,2004:221-223.
[3]庞继先,周健强.水下无人航行器在未来反水雷作战中的使用[J].海军学术研究,2006(6):19-20
[4]汪炘.探雷声纳图像仿真研究[D].武汉:海军工程大学,2010:65-66.
[5]汪炘,姜可宇.探雷声纳图像仿真技术[J].声学技术,2010,35(12):10-15.
[6]姜可宇,蔡志明.一种探雷声纳背景图像仿真的快速实现方法[J].指挥控制与仿真,2012,34(4):98-101.
猜你喜欢
火力与指挥控制(2021年8期)2021-09-08
哈尔滨工程大学学报(2021年3期)2021-05-08
数字海洋与水下攻防(2020年5期)2021-01-04
数字海洋与水下攻防(2020年5期)2021-01-04
数字海洋与水下攻防(2020年5期)2021-01-04
考试与评价·八年级版(2020年5期)2020-10-29
科技传播(2019年21期)2019-11-12
舰船电子工程(2018年11期)2018-11-26
剧作家(2018年2期)2018-09-10
火控雷达技术(2016年2期)2016-02-06
