基于改进量子进化算法的巡航导弹航路规划方法
2014-06-27 05:41张磊方洋旺柴栋雍霄驹
兵工学报 2014年11期
张磊,方洋旺,柴栋,雍霄驹
(空军工程大学航空航天工程学院,陕西西安 710038)
基于改进量子进化算法的巡航导弹航路规划方法
张磊,方洋旺,柴栋,雍霄驹
(空军工程大学航空航天工程学院,陕西西安 710038)
针对巡航导弹作战区域广阔、航路规划效率低的问题,提出了基于改进量子进化算法(IQEA)的巡航导弹航路规划方法。首先分析并确定巡航导弹航路规划空间,建立航路评价的代价指标;针对实数编码量子进化算法容易早熟、陷入局部最优的缺点,引入染色体的概率表达特性,使得每条染色体均能以一定概率表达优化问题的所有可行解;借鉴遗传算法的思想,在IQEA中引入染色体繁殖机制,结合动态量子门实现染色体的进化,实现算法局部搜索和全局搜索的平衡。仿真实验结果表明,基于带繁殖机制的IQEA的航路规划算法能够快速、稳定地搜索到代价更低的航路,所规划航路能够有效进行威胁规避、地形回避和地形跟随。
运筹学;巡航导弹;航路规划;改进量子进化算法
0 引言
巡航导弹航路规划是在给定的战场环境中,综合考虑导航精度和机动能力的限制,充分利用地形和敌情信息,为巡航导弹规划出从起始点到目标点、在一定的评价指标下性能最优或次优的飞行轨迹,使巡航导弹能够进行地形跟随和回避、规避敌方威胁,提升作战效能[1]。由于巡航导弹射程远、作战区域广阔,通常的规划算法搜索出一条可行航路需要很长的时间,难以满足现代战争对作战反应时间越来越高的要求。因此需要提高航路规划算法的效率,在限定时间内搜索出航路性能最优且满足各种约束条件的航路。
量子进化算法(QEA)[2-5]自提出以来,被广泛应用于函数优化、参数估计、工业控制、路径优化等领域,能够以较小的种群规模实现快速收敛和全局寻优,其主要特征在于:1)量子位的概率幅表示使得量子染色体能够以概率表达所有状态;2)从量子染色体到二进制解的观测机制;3)通过量子门旋转使得整个种群趋向当前最优解带来的快速收敛性。从本质上讲,巡航导弹航路规划是三维空间中的路径搜索,是一个具有连续搜索空间的多约束多目标非线性优化问题[6]。目前,已经有学者将量子进化算法应用到飞行器航路规划中。文献[7]将量子进化算法应用到无人机航路的搜索和选择过程中,采用量子门旋转角动态调整策略,引入交叉和变异策略实现航路的优选。文献[8]改进了量子染色体的进化策略,使之比基本的QEA具有更高的搜索效率。采用二进制量子比特编码的进化算法在求解组合优化问题时表现出优越的性能,然而对于航路规划问题而言,这种编码方式与实际航路相去甚远,算法的执行效率较低,无法满足搜索精度的要求。与之相比,实数编码在概念上更加接近问题空间,从规划空间到问题空间和搜索空间的映射都十分直观。
近年来,许多学者都对实数编码QEA进行了研究。Zhao等[9]提出了一种实数编码混沌QEA,采用实数及其相位角进行编码,实现了神经网络权重值的调节和学习。高辉等[10-11]基于3倍体编码,利用量子门旋转和互补双变异算子进化,在保持解的多样性的同时具有较好的收敛速度。Li等[12]提出了一种基于Bloch球面坐标的量子位编码算法,采用Bloch球面坐标表示优化问题的可行解,能够避免观测量子位产生的随机性,可用于连续数值优化问题的求解,提高搜索效率。上述研究均采用实数编码,基于量子门旋转策略保证进化的方向性,尽量维持群体多样性和算法收敛性之间的平衡。然而由于缺少了问题可行解的概率表达和随机观测,编码样本多样性被极大降低,量子门旋转策略使得所有染色体都朝向当前最优染色体快速演化,算法容易陷入局部最优,极易早熟。
本文在实数编码QEA的基础上,结合巡航导弹航路规划的特点,改进量子进化算法(IQEA)的编码方式、引入染色体概率表达机制和繁殖机制,实现更加快速、稳定的航路搜索。
1 航路规划问题描述
巡航导弹航路规划问题主要包括约束条件、规划空间和代价指标等要素,其定义一般可描述[13]为:在某个作战环境中,为巡航导弹规划出从预定发射点S到目标点E的一系列航路点(P1,P2,…, Pn),使得在满足航路约束条件C的前提下,根据给定的航路代价指标J,有:
1.1 航路约束条件
由于战场环境、导弹机动性能和作战任务的限制,规划航路需要满足一定的约束条件,主要包括地形约束、射程约束、速度约束、最小直飞距离约束、最大拐弯角约束、最大爬升/俯冲角约束、攻击进入角约束和攻击时间约束等。关于航路约束条件,文献[13]进行了详细论述,在此不再赘述。
1.2 规划空间描述
巡航导弹航路规划是三维空间中的航路点搜索,理论上战场的任何位置都有可能成为中间航路点。而实际上,由于巡航导弹性能和作战意图的约束,航路点的搜索只能在有限的区域中进行。如图1所示,巡航导弹的任务是从S点发射、攻击位于E点的目标,目标位于巡航导弹最大有效射程之内,即

式中:LSE为发射点S与目标点E之间的距离;Lmax为最大有效射程。
图1 规划空间示意图Fig.1 Path planning space
由于最大有效射程的限制,巡航导弹的规划空间即为图1中所示的虚线长方形包含的空间区域,记为Ω,虚线长方形的长为Lmax,宽为
定理巡航导弹规划航路满足最大有效射程限制的必要条件为所有航路点Pi都位于规划空间Ω内,即所有飞出此区域的巡航导弹都无法完成任务。
证明以S点为原点,SE连线为横轴建立坐标系,则S的坐标为(0,0),E的坐标为(LSE,0).若存在航路点Pi(xi,yi)∉Ω,则航路总长L满足:
假设巡航导弹在攻击过程中会持续向目标点方向飞行,不存在迂回的反方向飞行,同时由于巡航导弹依次序经过n个中间航路点,因此中间航路点的分布也是从发射点开始,依次由近及远分布。如图2所示,用n条垂线(图中垂直虚线段)将SE之间的连线n+1等分,则第i个航路点Pi的搜索区域就被限定在图中以第i条垂线为中心线的阴影部分区域中,其中阴影部分长方形的长和宽分别为
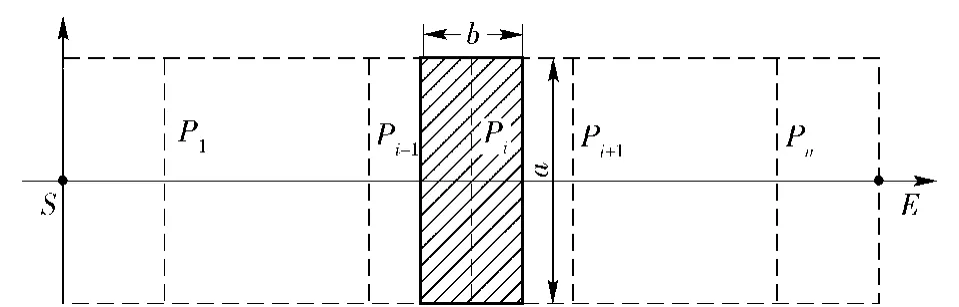
图2 航路点分布范围Fig.2 Distributing area of waypoint
巡航导弹航路规划需要地形信息的支持,由于实际地形极不规则,难以用数学模型精确描述,地形数据库能够提供的地形数据都是以栅格形式存储的。而在实际规划过程中,可能用到规划区域中任意一点的高层数据,这就需要通过对已知数据进行插值来获取不在栅格上的位置的高度数据。设z(x,y)为栅格化的高层数据,插值获得的航路点Pi(xi,yi,hi)处的高度为g(xi,yi),则航路点Pi的绝对高度zi为式中:hi为航路点的离地高度。

1.3 航路代价指标
航路代价指标的建立是巡航导弹航路规划的基础[14]。对于一条可行航路p=[S,P1,P2,…,Pn, E],其综合航路代价J(p)由航程指标J1(p)、高度指标J2(p)和威胁指标J3(p)组成[13],即

式中:w1、w2和w3分别为航程指标、高度指标和威胁指标的权系数。
航程指标J1(p)为航路段长度的总和,即

式中‖·‖表示两个航路点之间的欧式距离。
高度指标J2(p)为中间航路点高度的总和,即

巡航导弹的飞行速度一般较慢,一旦被敌方发现就很容易被拦截。为简化计算,将战场中的各种威胁源等效为圆形区域,采用{(x,y),R,K}来描述一个威胁区域,其中(x,y)为威胁区域中心坐标,R为威胁区域半径,K为威胁等级。一般而言,航路离威胁源越近、被威胁区域覆盖的长度越长,威胁也就越大,因而威胁指标J3(p)要使航路尽量远离威胁源,使巡航导弹能够在威胁较小的区域飞行。定义威胁指标J3(p)为所有航路段所受威胁的总和[15],即
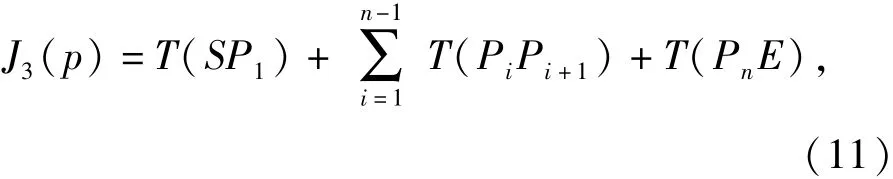
式中:T(·)表示两个航路点之间航路段的威胁值, T(·)的具体计算公式为

式中:Kj表示第j个威胁源的威胁等级;Rj为第j个威胁源的威胁半径;dj为第j个威胁源到该航路段的距离;lj为该航路段被第j个威胁源覆盖的长度。
2 巡航导弹航路规划方法
按照前文描述,巡航导弹航路规划问题就转化为如何优化规划空间中的n个中间航路点的坐标,使航路代价指标J(p)最小的问题。
2.1 航路编码
航路编码就是在染色体和实际航路间建立映射

式中:[qi,1,…,qi,n]和[qi,n+1,…,qi,2n]分别对应于n个中间航路点在水平面内的横坐标值x和纵坐标值y;[qi,2n+1,…,qi,3n]为n个中间航路点的离地高度h;θi,j为第i个染色体的第j个量子位对应的相位角,θi,j∈[-π/2,π/2].
2.2 适应度函数
适应度函数用于计算种群中染色体,即备选航路的适应度值,以判断备选航路的优劣并通过量子门旋转引导整个群体向最优航路逼近。适应度函数是航路染色体的优势函数,航路代价指标越小,则表示该航路的染色体就越适应环境,其适应度就越高;反之,航路代价指标越大,则表示该航路的染色体越不适应环境,其适应度就越低。本文选择航路代价的倒数作为适应度函数:

式中:f(Qi)为染色体Qi的适应度函数;F(pi)为染色体Qi所表示航路pi的代价。
由于种群采用随机初始化,种群中既有可行航路,又有不可行航路。若pi为可行航路,其综合代价可根据1.3节中的方法计算,即

若pi为不可行航路,其航路代价中除航程代价、高度代价和威胁代价外,还应加上约束违背量,则其综合代价为

式中vi为约束违背参数,取值为违背约束条件的个数。
2.3 量子位观测
在IQEA中,相位角不再表示一个确定的角度值,而是通过观测操作以一定的概率表现为区间[-π/2,π/2]上的所有角度值,那么所有相位角映射到解空间后,由于量子位的叠加态特性,种群中的染色体Qi表示的也就不是一条确定的航路,而是能够以一定概率表示规划空间中的所有航路。经过观关系,即用染色体表示规划空间中的备选航路。设初始种群Q={Q1,Q2,…,Qm},其中m为种群规模。对于单枚巡航导弹的离线航路规划而言,其发射点和目标点是固定的,因此只需要对n个中间航路点进行编码。本文中每个航路点的空间位置信息由水平坐标(x,y)和离地高度h描述,则采用定长实数编码的备选航路Qi(i=1,2,…,m)的染色体结构为测操作,相位角θi,j的观测值O(θi,j)为

式中:rando是[0,1]间的均匀随机数;PO是[0,1]间的常数,称为观测概率;ri,j为满足一定分布条件的随机数,使得O(θi,j)在相位角空间的分布与O(θi,j)和θi,j之间的距离呈反比,越远离θi,j,概率越小。
随机数ri,j集中体现了量子算法的概率表达特性,决定观测后染色体在搜索空间的分布,因此选择合适的分布函数至关重要。本文分别选择正态分布、指数分布和柯西分布进行研究,不同的分布函数将产生不同的IQEA.
服从正态分布的随机数的概率密度函数为

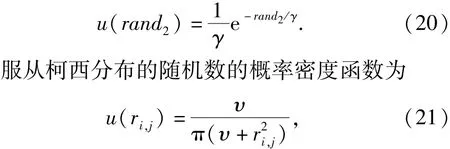
服从指数分布的随机数为

式中:rand1为[-1,1]上均匀分布随机数;rand2服从参数为γ的指数分布,其概率密度函数为

2.4 染色体繁殖机制
为了进一步丰富算法的种群多样性,增强算法跳出局部最优解的能力,提高全局寻优能力、稳定性和可靠性,文中在IQEA里引入繁殖机制。在遗传算法中,繁殖就是对父代种群进行交叉、变异和选择操作形成子代种群的过程[16]。其中交叉操作通过随机选择两个或多个父代染色体生成新的染色体;变异操作通过随机改变父代染色体的基因值生成新染色体;而选择操作则基于一定的规则对种群中的染色体进行优胜劣汰,保证种群的数量和质量。
在本文中,交叉算子以概率Px按照以下步骤生成新染色体:1)在父代种群中随机选择两个不同的染色体Qr1和Qr2,r1≠r2;2)新染色体Qm+i定义为Qr1和Qr2的随机加权和,即
式中:υ为柯西分布的参数。
种群中的染色体Qi经过观测,产生了一个新的染色体O(Qi),这两个染色体中只有一个能够保留。IQEA采用的是一种“贪婪”的操作,只有当染色体O(Qi)的适应度f(O(Qi))高于原有染色体Qi的适应度f(Qi)时,O(Qi)才会被保留,即

式中:j=1,2,…,sm,sm为变异产生新染色体的数量;ζj为[0,1]间的均匀随机数。
经过交叉和变异操作,种群中共有m+sx+sm个染色体,选择操作的主要目标就是在保持种群良好多样性的同时,保留种群中的优良个体并保持种群规模。结合(μ+,λ)选择和随机选择[16],在产生sx+sm个新染色体后,对所有染色体进行适应度排序,首先保留适应度最高的τm(0≤τ≤1)个染色体,而余下的(1-τ)m个染色体则从剩余的适应度较低的(1-τ)m+sx+sm个染色体中随机选择。
2.5 动态量子门
染色体进化是QEA搜索的核心,是种群提高适应度的关键手段,QEA通过量子门旋转策略,可使种群最终收敛到最优解。由于量子门旋转的实质就是改变量子位的相位角,因此旋转门对量子位的操作就可以通过相位角的加减实现。在IQEA中,对于t代种群中的染色体Qi(t),经过动态量子门旋转,其t+1代染色体Qi(t+1)的第j个量子位的相位角为

式中:Γθi,j(t)为量子门旋转的转角;θb,j(t)为t代最优染色体的第j个量子位的相位角。
量子门旋转角极大地影响算法的搜索效率和精度。在搜索初期,算法需要较大的旋转角以粗粒度探索未知空间;而在搜索后期,随着解的质量的提升,算法需要逐步减小旋转角以细粒度搜索当前空间。本文使用动态旋转角代替固定旋转角,在算法迭代过程中动态调整旋转角。对于染色体Qi(t),其动态旋转角为

式中:i=1,2,…,sx,sx为交叉产生新染色体的数量; ζ为[0,1]间的均匀随机数。
变异操作的目标是在种群中引入新的基因,提高种群多样性。一般情况下,为了不破坏种群的质量,变异概率通常较低。作为一种次要的新染色体生成方法,变异操作以概率Pm采用完全随机初始化的方法产生一个新的染色体加入到种群中,即

式中:Γθ0为初始旋转角;λ为调整转角变化率的正常数;NCmax为最大迭代次数。
2.6 算法步骤
基于IQEA的巡航导弹航路规划算法步骤为:
步骤1仿真参数初始化;
步骤2t=0,按照攻击进入角约束初始化种群;
步骤3执行交叉操作,得到sx个新航路染色体;
步骤4执行变异操作,得到sm个新航路染色体;
步骤5计算m+sx+sm个染色体的适应度,执行选择操作获得m个染色体;
步骤6观测染色体Qi(t),确定染色体O(Qi);
步骤7计算O(Qi)的适应度,保留Qi(t)和O(Qi)中适应度较高染色体;
步骤8执行动态量子门旋转操作;
步骤9t=t+1,终止条件判断;若满足,输出最优航路,算法结束;否则转到步骤3.
3 仿真实例
为验证基于IQEA的巡航导弹航路规划算法的有效性和优越性,在Pentium Dual 2.2 GHz,2 G内存的PC上分别进行基于遗传算法(GA)、粒子群优化(PSO)算法、微分进化算法(DEA)、实数编码量子进化算法(RQEA)和IQEA的巡航导弹航路规划仿真,操作系统为Windows XP,编程环境为Matlab2010b.仿真中地形为计算机模拟产生的500 km×500 km的方形区域,威胁为模拟生成的圆形区域。对所有的仿真实验,均采用以下参数:
1)中间航路点为15个,最大迭代次数为500;
2)代价函数中系数均取为1/3;
3)安全飞行离地高度区间为[50 m,300 m];
4)最大拐弯角为60°,最大爬升/俯冲角为30°;
5)有效射程为800 km;最小直飞距离20 km;
6)设置战场环境数据如表1所示;
7)不同算法的参数设置如下:采用GA,交叉概率为0.5,变异概率为0.1;采用PSO算法,惯性权重为0.729,加速常数为1.494;采用DEA,放缩因子为0.5,交叉常量为0.9;采用RQEA,Γθ0=15°,λ=6,无量子位概率表达;采用IQEA,PO=0.1,Γθ0=15°, λ=6,其中:IQEA1、IQEA2和IQEA3均不带繁殖机制,分别采用γ=0.3的双指数分布、σ=0.5的正态分布和υ=0.2的柯西分布;IQEA4带繁殖机制,交叉概率为0.9,变异概率为0.1,采用υ=0.2的柯西分布进行量子位观测。
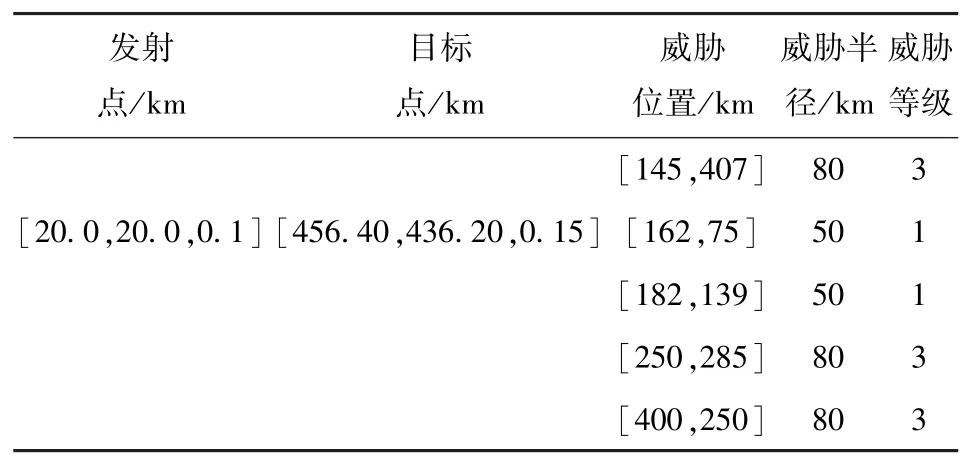
表1 威胁信息Tab.1 Information of threats
种群规模取30,8种算法分别对表1中的战场环境运行30次仿真实验,分别记录每次仿真的最优航路代价、生成可行航路的次数、生成可行航路的迭代次数(未生成则记为800)和仿真总时间,并求取仿真结果中的最优代价、最劣代价、平均值和标准差等相关统计量,如表2所示。
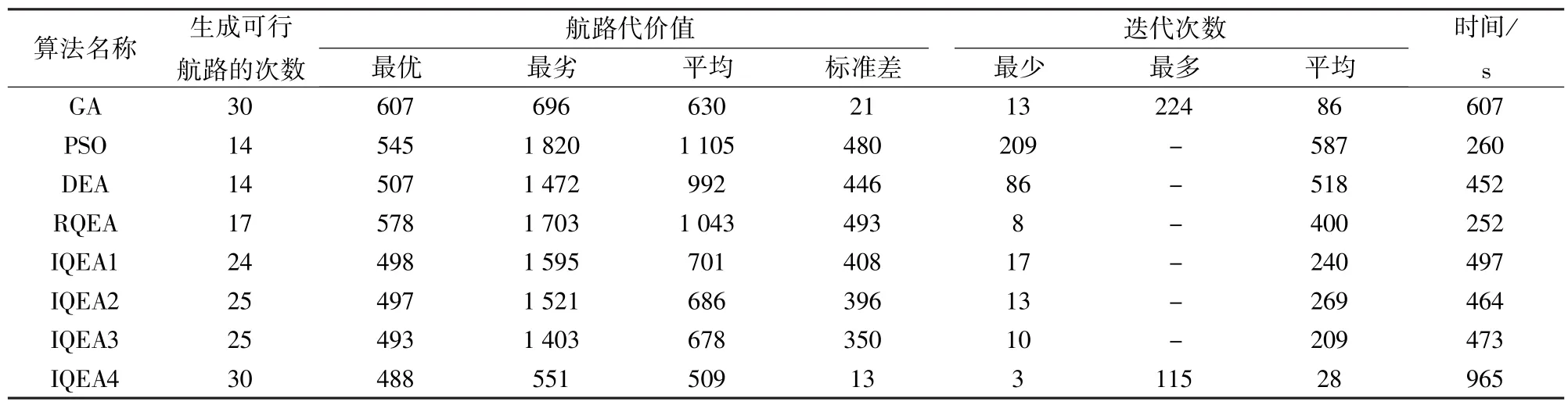
表2 仿真结果Tab.2 Simulation results
通过对比表2中的数据不难发现,IQEA的综合性能优于其他4种算法:1)GA在每次实验中都能够很快搜索到可行航路,且由于仿真中给不可行航路以极大的惩罚值,使得GA搜索出来的航路平均代价值最小,但是算法的整体寻优能力极差,搜索到的航路代价较大,所有航路几乎都无法满足巡航导弹对安全性的要求,不适用于复杂环境中远程巡航导弹的航路规划问题的求解;2)PSO、DEA和RQEA仅能够在50%左右的实验中搜索到可行航路,与之相比,4种IQEA均能保证80%以上的概率生成可行航路,具有较高的算法稳定性;3)IQEA的最优代价、平均代价和标准差均小于PSO、DEA和RQEA,表明IQEA能够更加稳定地找到代价更小的航路,具有较强的寻优能力;4)与PSO、DEA和RQEA相比,IQEA均能很快搜索到可行航路,所需迭代次数大幅减少,具有较快的收敛速度。
对比IQEA1~IQEA3的数据和收敛曲线(见图3)可以看出,IQEA3性能最优,IQEA2次之,而IQEA1较差,其主要原因在于3种算法中量子位观测值的分布特性的差异。柯西分布较广阔的尾部使得IQEA3的观测过程中,有更大可能获得更多、更加优秀的解;而双指数分布的分布特性使得观测过程中个体过于集中在当前解附近,在观测过程中获得较优个体的可能性较小。因此在多次航路规划过程中,IQEA3所规划航路的代价相对较小,且收敛速度快,规划时间也较少。IQEA4中的繁殖机制大大丰富了种群的多样性,增强了算法跳出局部最优的能力,提高了算法生成可行航路的概率和可靠性,大幅提高了航路规划算法的性能:1)从30次实验中搜索的航路平均代价可以看出,IQEA4在平均意义上能够搜索出代价更小的航路,具有极强的全局寻优能力;2)IQEA4搜索出的航路代价的标准差极小,算法的稳定性很高;3)IQEA4搜索出可行航路的迭代次数大幅减少,生成可行航路平均仅需1.802 8 s,比IQEA3减少了70%以上,且在同样条件下能够搜索出代价更低的航路,算法收敛速度更快。
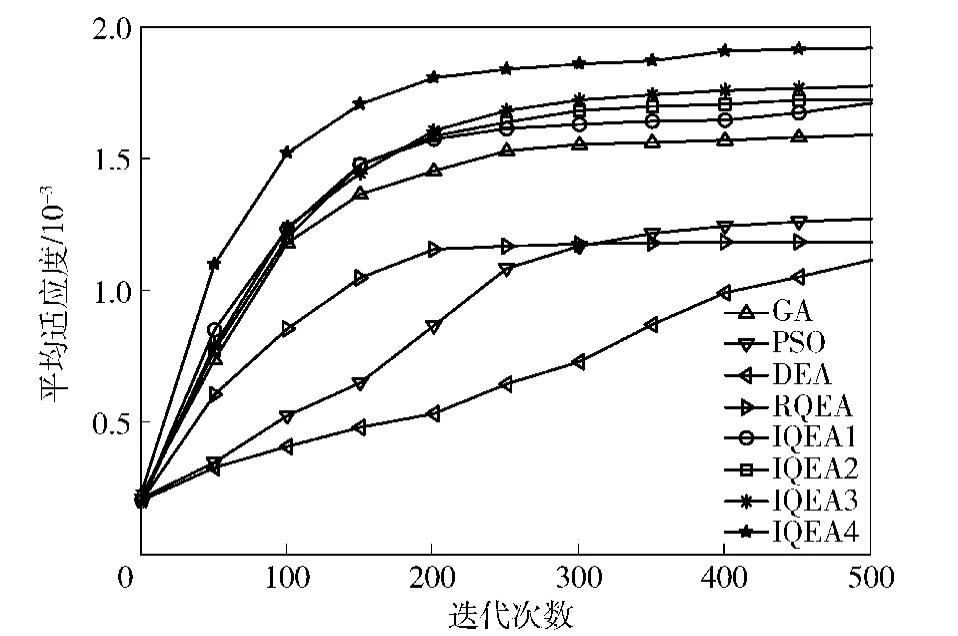
图3 算法收敛曲线Fig.3 Convergences of fitness
图3显示的是算法收敛曲线,描述了30次仿真实验的平均适应度的变化趋势。由于实验中适应度定义为代价值的倒数,平均适应度实际上是每次实验获得的最优航路代价值的倒数的平均值。从图3中可以看出,IQEA4的收敛曲线位于图像最上方,说明算法具有更快的收敛速度。
为了比较不同算法规划航路的优劣,表3列出了8种算法在30次仿真实验中搜索到的最优航路的航程;图4显示了最优航路的水平投影,图4(a)中分别为GA、PSO、DEA和RQEA规划出的最优航路,图4(b)为本文提出的IQEA规划出的最优航路,图4中虚线圆代表模拟的威胁区域。基于GA和PSO的航路均穿过了威胁区域,未能有效规避威胁,且航路转弯较多;基于DEA和RQEA的航路均成功实现了威胁规避,且航路相对平滑,但航路航程较长,说明这4种算法未能实现航路的优选,均不同程度地陷入了局部最优。与之相比,基于IQEA的最优航路均成功实现了威胁规避、航路更为平滑且总航程较小。
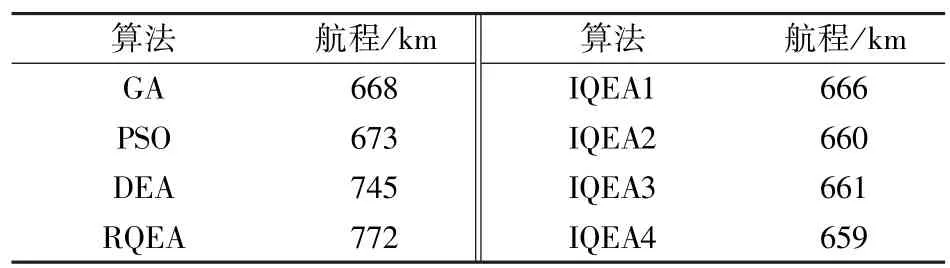
表3 最优航路航程Tab.3 Lengths of optimal paths
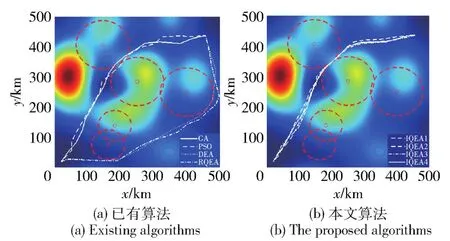
图4 最优航路的水平投影Fig.4 Horizontal projections of optimal paths
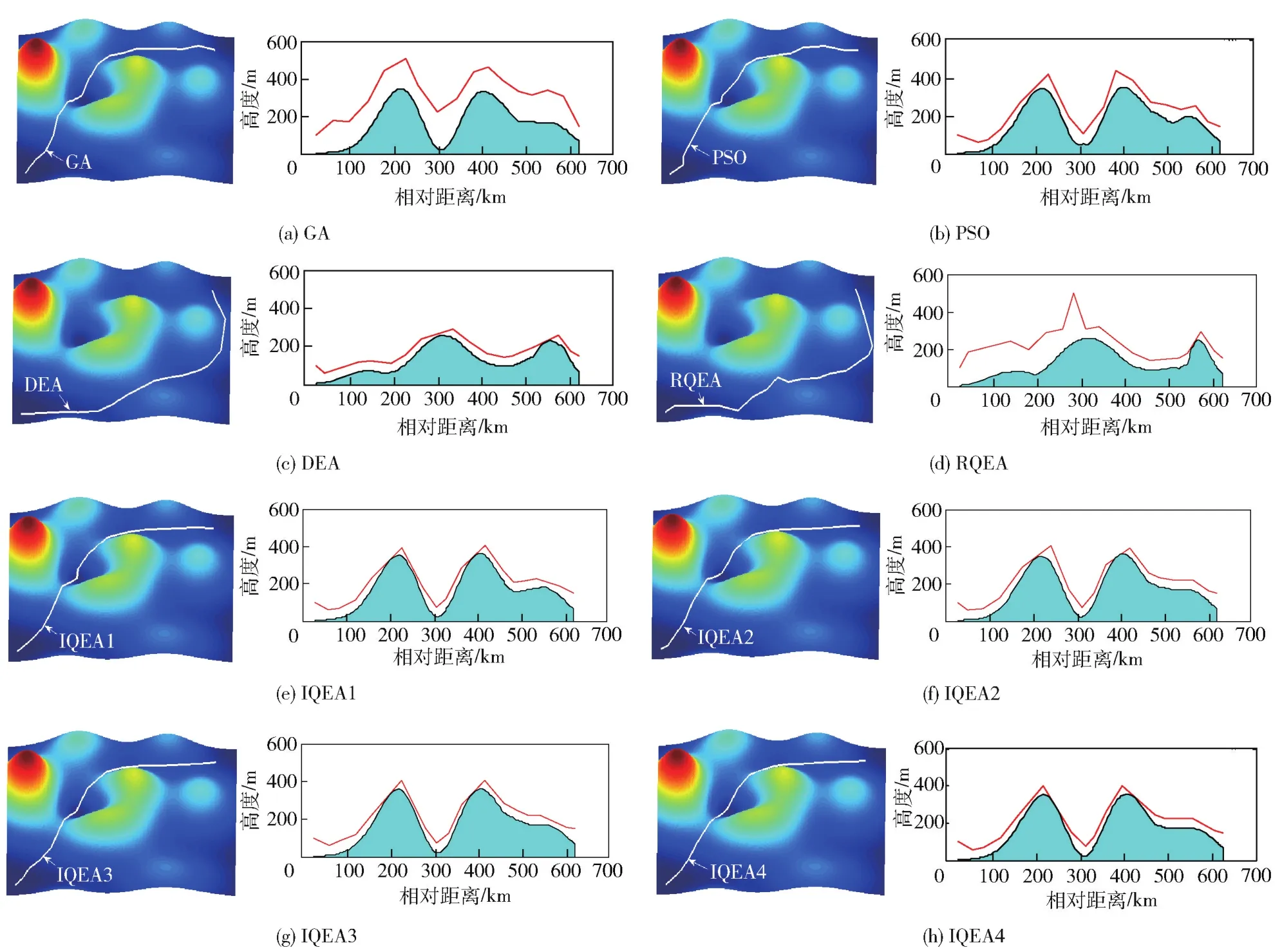
图5 最优航路三维显示及其剖面图Fig.5 3D view and cutaway view of optimal paths
图5分别为8种算法搜索的最优航路的三维显示和剖面图,其中剖面图中横轴为航路点与发射点之间沿旋转坐标系横轴的相对距离,纵轴为绝对高度值,曲线代表航路点高度,阴影部分则表示地面高度。从图5中可以看出,基于IQEA的最优航路能够有效利用地形进行遮蔽,在保持安全离地高度的条件下能够尽量降低离地飞行高度,能够更好地进行地形回避和地形跟随。
4 结论
巡航导弹航路规划是一个复杂的多约束多目标非线性优化问题,由于巡航导弹射程远、作战区域广阔,规划出一条可行航路需要很长的时间和极大内存。本文针对单枚巡航导弹的航路规划问题,确定了航路搜索的规划空间,建立了航路评价的代价指标;在实数编码QEA中引入了染色体概率表达特性,充分利用相位角编码和量子染色体概率表达特性的优点,使得每一条染色体均能以一定概率表达优化问题的所有可行解,克服传统的二进制量子比特编码在求解数值优化问题时编码效率低下、求解精度低的缺点;借鉴GA的进化思想,在IQEA中引入交叉和变异算子,增强算法跳出局部最优解的能力,提高算法搜索的稳定性和可靠性,同时采用自适应变步长量子门实现量子门旋转角的动态变化,有效保证种群的多样性和进化的方向性。仿真结果表明,基于IQEA的巡航导弹航路规划方法能够更加稳定、快速地搜索到代价更低的航路,规划航路能够有效利用地形遮蔽,并实现威胁规避、地形回避和地形跟随。
References)
[1] Helgason R V,Kennington J L,Lewis K R.Cruise missile mission planning:a heuristic algorithm for automatic path generation[J]. Journal of Heuristics,2001,7(5):473-494.
[2] Narayanan A,Moore M.Quantum-inspired genetic algorithms[C]∥Proceedings of 1996 IEEE International Conference on Evolutionary Computation.Nogaya,Japan:IEEE,1996:61-66.
[3] Han K H,Kim J H.Quantum-inspired evolutionary algorithm for a class of combinatorial optimization[J].IEEE Transactions on Evolutionary Computation,2002,6(6):580-593.
[4] Han K H,Kim J H.Quantum-inspired evolutionary algorithms with a new termination criterion,HεGate,and two-phase scheme[J]. IEEE Transactions on Evolutionary Computation,2004,8(2): 156-169.
[5] Kim Y,Kim J H,Han K H.Quantum-inspired multi objective evolutionary algorithm for multiobjective 0/1 knapsack problems[C]∥IEEE Congress on Evolutionary Computation.Vancouver,Canada: IEEE,2006:2601-2606.
[6] 刘钢,老松杨,谭东风,等.反舰导弹航路规划问题的研究现状与进展[J].自动化学报,2013,39(4):347-359.
LIU Gang,LAO Song-yang,TAN Dong-feng,et al.Research status and progress on anti-ship missile path planning[J].Acta Automatica Sinica,2013,39(4):347-359.(in Chinese)
[7] 孙阳光,丁明跃,周成平,等.基于量子遗传算法的无人飞行器航迹规划[J].宇航学报,2010,31(3):648-654.
SUN Yang-guang,DING Ming-yue,ZHOU Cheng-ping,et al. Route planning based on quantum genetic algorithm for UAVs[J]. Journal of Astronautics,2010,31(3):648-654.(in Chinese)
[8] 何兵,刘刚,赵鹏涛,等.基于改进量子遗传法的巡航导弹水平航迹规划[J].计算机仿真,2012,29(9):109-112
HE Bing,LIU Gang,ZHAO Peng-tao,et al.Horizontal route planning of cruise missile based on the improved quantum genetic algorithm[J].Computer Simulation,2012,29(9):109-112. (in Chinese)
[9] Zhao S F,Xu G H,Tao T F,et al.Real-coded chaotic quantuminspired genetic algorithm for training of fuzzy neural networks[J]. Computers and mathematics with Applications,2009,57(11/ 12):2009-2015.
[10] 高辉,徐光辉,张锐,等.实数编码量子进化算法[J].控制与决策,2008,23(1):87-90.
GAO Hui,XU Guang-hui,ZHANG Rui,et al.Real coded quantum evolutionary algorithm[J].Control and Decision, 2008,23(1):87-90.(in Chinese)
[11] 高辉,张锐.改进实数编码量子进化算法及其在参数估计中的应用[J].控制与决策,2011,26(3):418-422.
GAO Hui,ZHANG Rui.Improved real-coded quantum evolutionary algorithms and its application on parameter estimation[J].Control and Decision,2011,26(3):418-422.(in Chinese)
[12] Li P,Li S.Quantum-inspired evolutionary algorithm for continuous space optimization based on Bloch coordinates of qubits[J]. Neurocomputing,2008,72(1/2/3):581-591
[13] 丁明跃,郑昌文,周成平,等.无人飞行器航迹规划[M].北京:电子工业出版社,2009:110-119.
DING Ming-yue,ZHENG Chang-wen,ZHOU Cheng-ping,et al. Route planning for unmanned aerial vehicles[M].Beijing:Publishing House of Electronics Industry,2009:110-119.(in Chinese)
[14] 谢晓方,孙涛,欧阳中辉.反舰导弹航路规划技术[M].北京:国防工业出版社,2010:23-30.
XIE Xiao-fang,SUN Tao,OUYANG Zhong-hui.Path planning for anti-ship missile[M].Beijing:National Defense Industry Press,2010:23-30.(in Chinese)
[15] 苏菲,彭辉,沈林成.基于协进化多子群蚁群算法的多无人作战飞机协同航迹规划研究[J].兵工学报,2009,30(11): 1562-1568
SU Fei,PENG Hui,SHEN Lin-cheng.Research on multi-UCAV cooperative route planning based on coevolutionary multi-ant-colony algorithm[J].Acta Armamentarii,2009,30(11):1562-1568.(in Chinese)
[16] Andries P E.计算群体智能基础[M].谭营,译。北京:清华大学出版社,2009:112-134.
Andries P E.Fundamentals of computational swarm intelligence [M].Tan Ying,translated.Beijing:Tsinghua University Press, 2009:112-134.(in Chinese)
Cruise Missile Path Planning Based on Improved Quantum Evolutionary Algorithm
ZHANG Lei,FANG Yang-wang,CHAI Dong,YONG Xiao-ju
(School of Aeronautics and Astronautics,Air Force Engineering University,Xi'an 710038,Shaanxi,China)
For the low efficiency of cruise missile path planning,a novel path planning algorithm is proposed based on improved quantum evolutionary algorithm(IQEA).The search space is constructed based on path constraints,and the criteria of path estimation are presented.Probabilistic representation quantum chromosome is introduced to represent all the feasible solutions probabilistically to solve the premature problem.The genetic algorithm is used for reference,and the breeding strategy is introduced to IQEA.The dynamic quantum rotation gate is used to update the chromosomes to realize a good balance between local and global searches.Simulation results show that IQEA with breeding strategy can generate flight path with lower cost rapidly and steadily.
operation research;cruise missile;path planning;improved quantum evolutionary algorithm
V249.1
A
1000-1093(2014)11-1820-08
10.3969/j.issn.1000-1093.2014.11.013
2013-12-13
张磊(1985—),男,博士研究生。E-mail:szl1985@163.com;
方洋旺(1966—),男,教授,博士生导师。E-mail:ywfang2008@sohu.com
猜你喜欢
环球时报(2022-08-18)2022-08-18
军民两用技术与产品(2021年9期)2021-11-27
火力与指挥控制(2020年2期)2020-04-02
军事文摘(2020年24期)2020-02-06
海峡姐妹(2017年12期)2018-01-31
语文世界(初中版)(2017年5期)2017-06-22
作文与考试·初中版(2017年12期)2017-04-19
北京航空航天大学学报(2016年7期)2016-11-16
海军航空大学学报(2015年3期)2015-11-11
海军航空大学学报(2015年1期)2015-11-11