
基于全加速度计惯性测量单元的微震颤测量技术研究
2014-07-01 23:36潘鸿飞吕隽代海洋
机械工程师 2014年4期
潘鸿飞, 吕隽, 代海洋
(1.92941部队92分队,辽宁葫芦岛125001;2.哈尔滨工程大学机电工程学院,哈尔滨150001)
基于全加速度计惯性测量单元的微震颤测量技术研究
潘鸿飞1, 吕隽1, 代海洋2
(1.92941部队92分队,辽宁葫芦岛125001;2.哈尔滨工程大学机电工程学院,哈尔滨150001)
对基于全加速度计惯性测量单元的微震颤测量技术进行研究和分析,设计了测量系统的方案并研制了实验样机,惯性测量单元采用9加速度计的配置形式;推导了加速度计输出的比力方程,提出了将积分法和开方法结合起来求解角速度的算法;给出了利用四元数求解捷联矩阵的数值求解方法和在惯性坐标系下载体系上任意位置在任意时刻坐标的数值求解方法。
微震颤;加速度计;惯性测量单元
0 引言
生理性微震颤是人与生俱来的运动时固有的一种肢体小幅度振动,一般情况下生理性微震颤对人们的影响非常小,但是在某些需要精确操作的场合,如人在回路的导弹攻击操作等,生理性微震颤的影响是不能忽视的[1-2],必须考虑由生理性微震颤给操作所带来的不精确性和不稳定性。另外,随着智能电子设备的普及,人在回路的导弹攻击操作,生理性微震颤对于摄像机、瞄准系统和手写设备输入的影响也同样不容忽视。因此,开发简单、易用、廉价的震颤抑制系统有着较强的现实意义。
1 微震颤测量单元的方案设计

图1 震颤测量加速度计安装示意图
图2 震颤测量单元的试验样机
本文设计的震颤测量单元采用3个双轴加速度计和一个三轴加速度计构成的全加速度计惯性测量系统,加速度计的安装示意图如图1所示,3个双轴加速度计安装在彼此相邻的立方体的面中心处,三轴加速度计的中心位于立方体的中心,这种配置方式在角速度的解算算法中,充分利用了9加速度计配置方案输出的冗余信息,角速度的大小由开方得到,角速度的方向通过判断角加速度的大小来确定,避免了由积分求取角速度所带来的累积误差[3]。加速度计选择ADXL203双轴加速度计和KXR94-2283三轴加速度计,震颤测量单元的试验样机如图2所示。
2 加速度计输出的比力方程
设{b}为载体坐标系,{i}为惯性坐标系,载体坐标系以载体质心为坐标原点,惯性坐标系以地面选定的参考点作为坐标原点,其中载体坐标系的坐标轴方向与放置在载体系质心的三轴加速度计的敏感轴同向,如图1所示。初始时刻,载体系与惯性系重合。
设载体上任一点在载体坐标系中用矢径r表示,在惯性坐标系中用矢径R′表示,载体坐标系原点在惯性坐标系中用矢径R表示,r、R、R′之间的相互关系如图3所示,有:

由哥氏定理,对式(1)求导:

式中ωib为载体系在惯性系中转动的角速度。


图3 坐标系间转换示意图
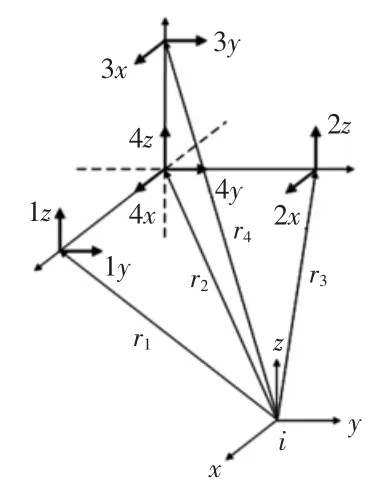
图4 加速度的敏感轴编号及位置示意

式中:Ai为载体质心处的比力;Gi为地球引力加速度;fi为载体系上任一点处的比力。
结合式(3)、式(4)、式(5),载体上任一点处的比力为:

对图4中加速度计各个敏感轴应用比力方程,有:

式中:fij为编号为i的加速度计在敏感轴j方向上测量的比力;Aij为编号为i的加速度计在惯性坐标系j方向的加速度;ribj为编号为i的加速度计矢径在载体坐标系j方向上的投影;ωij为载体系的角速度在惯性系j方向上的分量。
在图4中,由加速度计之间的相对位置关系可以得到:

式中:l为加速度计敏感轴中心与载体系坐标原点之间的距离。
在理论上,在方向j上,Aij是相同的。由式(7)和式(8),对敏感轴同向的比力方程进行运算,消除加速度的平方项,带入相应的值,可以得到:
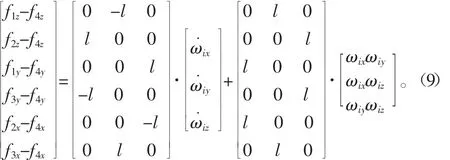
对式(9)进行变换,分别得到角速度的平方、微分和交叉乘积:

在本文设计的震颤测量系统中,加速度的测量存在较多的冗余信息,载体系每一个方向上的加速度均有3个测量值,为了全面利用测量信息,提高测量精度,设载体在3个方向上的加速度用式(11)表示:

式中:ki为编号为i的加速度计测量值的可信度;σAij为编号为i的加速度计j敏感轴方向上测量值的标准差;
可信度ki的计算涉及到安装误差及其它因素,由于3个双轴加速度计为同一型号,ki近似取为1/3。
从式(10)可以看出,角速度的求解可以采用积分和开方两种方式,其中开方可以直接对角速度平方项取平方根,也可以对相邻两轴角速度的乘积项做代数运算,然后取平方根。利用积分法求解角速度会出现累积误差,尽管所使用的加速度计精度较高,但加速度计的零漂不稳定,所引入的误差会随着积分而不断累积,且由此带来的误差没有边界;利用开方求解角速度时,虽然不会带来累计误差,但是角速度的符号无法直接由计算得到,需要通过其它辅助手段确定。将积分法和开方法结合起来求解角速度,可以在一定程度上避免单独使用开方法或积分法求解角速度所带来的问题。从文献[4]和[5]中可知,在积分法求解角速度的过程中,其主要误差来源于加速度计输出的零漂。零漂属于随机误差,尽管可以通过硬件在试验前进行调整,但加速度计的零漂并不能完全消除。从所选择的加速度计的手册和所确定的输出带宽可以得到两种加速度计所引入的噪声的有效值分别为



图5 积分法和开方法角速度解算误差仿真结果
3 捷联矩阵即时修正算法
在震颤测量中,采用捷联矩阵将载体系下的加速度和角速度转变为惯性系下的绝对加速度和角速度,测定载体的姿态。设捷联矩阵为T,则载体系与惯性系之间的

在测量过程中,需要不断地对捷联矩阵T进行修正,修正算法很多,主要有方向余弦算法、欧拉角变换算法和四元数算法等[6]。本文采用四元数算法,便于数值积分求解。
四元数由一个实数和三个虚数构成,表达式[7]为

由欧拉定理可知,具有固定点的刚体,其位置的变化可以通过刚体绕通过固定点的旋转轴转过一定的角度得到。

图6 欧拉定理示意图
设刚体绕旋转轴转过θ角,轴线在参考系中的方向余弦分别为cosα、cosβ、cosγ,则转轴的方向可以表示为:

该转动用四元数表示为:

从四元数的表示形式中可以看出,四元数既包含了转轴的方向,也包含了转角的大小。捷联矩阵的四元数表示形式为[7]

对式(19),只要知道了四元数中的4个元,即可求出捷联矩阵。载体坐标系时刻都在变化,因此,捷联矩阵也在时刻变化。捷联矩阵中四元数与角速度的关系为如下
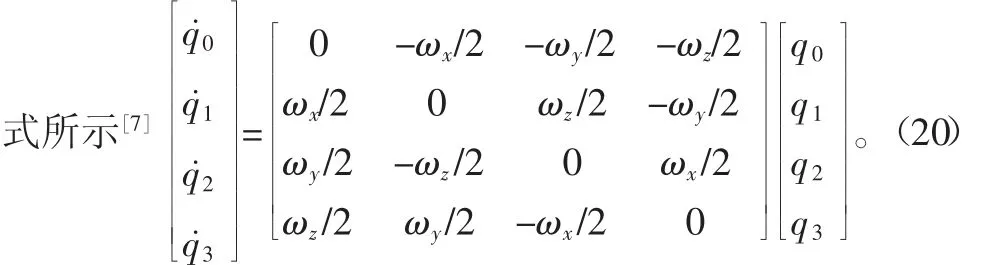
由式(10)可以求出ωx、ωy、ωz,从而得到关于四元数的微分方程组。
用式(19)来简写式(18)。关于式(19)所表示的微分方程组,利用四阶龙格——库塔进行数值求解,迭代过程为:

在使用式(20)进行迭代的过程中,需要初始时刻的值。根据坐标系的定义,参数的初始值为

根据四元数的定义,有:

结合式(20)和实时求解的角速度,即可实时计算出捷联矩阵,求出载体系下的物理量在载体系下的表示。
4 载体绝对位置的求解
根据捷联矩阵,加速度在惯性系中表示为
载体系上任一点任一时刻在惯性系中相对于载体系原点可以表示为
式中:ri为载体系上一点在惯性系中的矢量;rb为载体系上一点在载体系中的矢量。
载体系上任一点在任一时刻的位置可以表示为

5 结论
本文对生理性微震颤及其对精确操作的影响进行研究和分析,对基于惯性测量原理的生理性微震颤测试技术进行研究;设计了基于全加速度计惯性测量单元的生理性微震颤测量方案并研制了实验样机,惯性测量单元采用9加速度计的配置方式,避免了求解微分方程组;角速度的解算采用积分——开方融合算法,解决了积分法求解角速度时误差累计的问题,提高了测量的精度;用来实现物理量坐标系转换的捷联矩阵的求解采用四元数方法,这种方法易于在实时系统上实现。
[1] Win T L,Tan U X,Shee C Y,et al.Design and Calibration of an Optical Micro Motion Sensing System for Micromanipulation Tasks[C]//IEEE International Conference on Robotics and Automation,Roma,Italy,2007:3383-3388.
[2] Ang W T,Riviere C N,Khosla P K.Design and Implementation ofActive ErrorCanceling in Hand-held Microsurgical Instrument[C]//International Conference on Intelligent Robots and Systems,Maui,USA,2001:1106-1111.
[3] 王劲松,王祁,孙圣和.无陀螺微惯性测量组合的优化算法研究[J].哈尔滨工业大学学报,2002,34(5):632-635.
[4] 赵国荣,陈穆清.一种用于九角速度计GFSINS的姿态角速度辅助算法[J].系统仿真学报,2007,19(14):3350-3353.
[5] 刘涛,赵国荣,潘爽.无陀螺捷联惯导系统角速度解算的新方法[J].系统工程与电子技术,2010,32(1):162-165.
[6] 陈哲.捷联惯导系统原理[M].北京:宇航出版社,1986:885.
[7] 朱家海.惯性导航[M].北京:国防工业出版社,2008:209-213.
[8] Rocon E,Ruiz A F,Pons J L.Rehabilitation Robotics:a Wearable Exo-skeleton for Tremor Assessment and Suppression[C]// IEEE International Conference on Robotics and Automation,Barcelona,Spain,2005:2271-2272.
[9] 柳迪.消除手术机器人人手抖动问题的研究[D].天津:天津大学,2009.
[10] Latt W T,Tan U X,Shee C Y,et al.Ang.A Compact Handheld Active Physiological Tremor Compensation Instrument[C]//International Conference on Advanced Intelligent MechatronicsSuntecConvention and Exhibition Center,Singapore,2009:711-716.
(编辑:启 迪)
Research of Micro-tremble Measuring Technique Based on Total Accelerometer Inertial Measurement Unit
PAN Hongfei1,LV Jun1,DAI Haiyang2
(1.CPLA 92941 Unit 92 Element,Huludao 125001,China;2.College of Mechanical and Electrical Engineering, Harbin Engineering University,Harbin 150001,China)
Micro-tremble measuring technique based on total accelerometer inertial measurement unit is researched and analyzed.Measurement unit is designed and experimental model machine is developed.Inertial measurement unit consists of nine accelerometers.This paper derives specific gravity equation of accelerometer and forwards an algorithm combined of intergration and extraction of root to solve angular velocity.Computation method using quaternion computation of srrapdown matrix and computation method of arbitrary position at arbitrary time in inertial reference system are given.
micro-tremble;total accelerometer;inertial measurement unit
TB 114.3
A
1002-2333(2014)04-0044-04
潘鸿飞(1971—),男,硕士研究生,研究方向为导弹武器装备试验与鉴定。
2014-02-11
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06
北京航空航天大学学报(2017年5期)2017-11-23
中学生数理化·高一版(2017年3期)2017-07-08
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2017年12期)2017-04-23
光学精密工程(2016年5期)2016-11-07
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
弹箭与制导学报(2015年1期)2015-03-11
导航定位与授时(2014年2期)2014-04-27
