基于ANSYS软件的四轴工业机器人小臂自由模态分析
2014-07-01 23:36郜福亮张识超刘进福张文举
机械工程师 2014年5期
郜福亮, 张识超, 刘进福, 张文举
(1.常州铭赛机器人科技有限公司,江苏常州213164;2.常州先进制造技术研究所,江苏常州213164;3.71352部队保障部,河南安阳455000)
基于ANSYS软件的四轴工业机器人小臂自由模态分析
郜福亮1, 张识超2, 刘进福2, 张文举3
(1.常州铭赛机器人科技有限公司,江苏常州213164;2.常州先进制造技术研究所,江苏常州213164;3.71352部队保障部,河南安阳455000)
四轴工业机器人的小臂是机器人结构中的主要部件,小臂的结构及其性能直接影响整个机器人的精度和性能,对小臂自由模态的分析至关重要。利用有限元分析软件ANSYS对四轴工业机器人的小臂进行模态分析,自由模态分析能够对小臂的刚度及整个机器的稳定提供理论基础。
模态分析;固有频率;回转频率
0 引言
目前,随着科学技术的发展,机器人广泛地应用于工业领域,为企业节省了大量的劳动力,也为企业解决了招工困难等一系列问题。由于其精度高,能够适应各种恶劣的工作环境,工业机器人已成为未来工业发展的一个趋势。同时工业机器人能够大大地提高工作效率,为企业降低人工成本和生产成本。
四轴工业机器人的小臂是整个机器人系统中的主要机构之一,小臂的结构及其性能直接影响整个机器人的精度和性能。小臂在运动过程中振动频率对小臂的性能有着直接的影响,小臂的固有频率和小臂的刚度、强度有着直接的关系。本文利用有限元分析软件ANSYS对四轴工业机器人的小臂进行自由模态分析,自由模态分析能够对小臂的刚度及整个机器的稳定提供理论基础。
1 模态分析理论基础
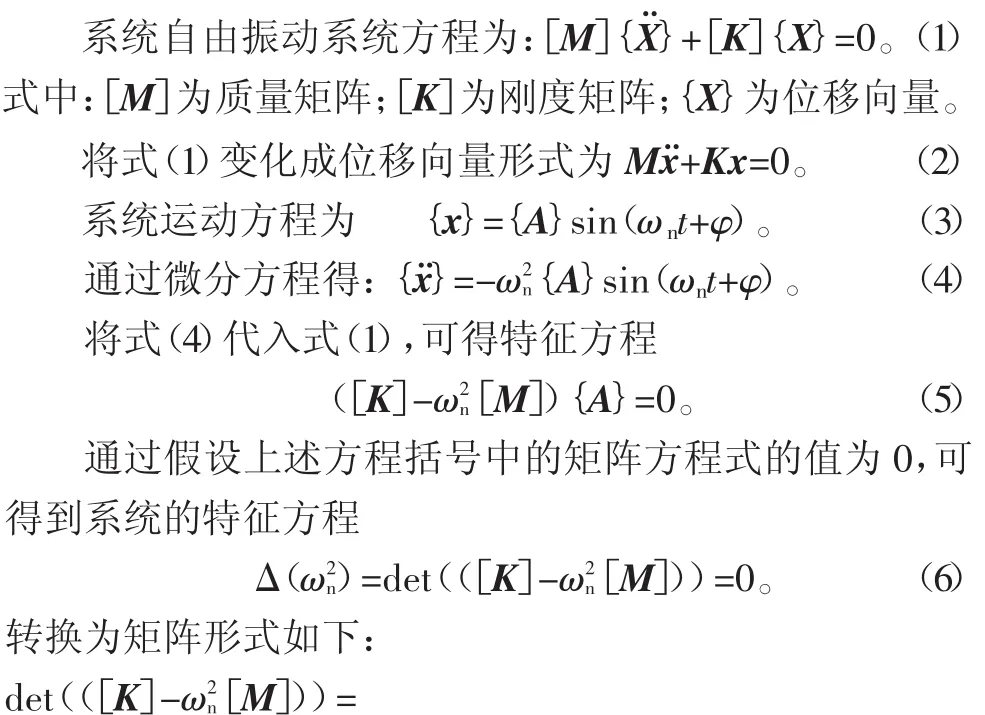
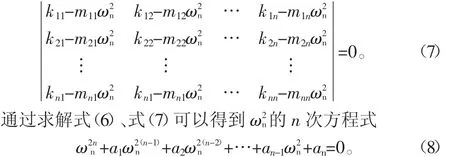
模态分析用于确定设计结构或机器部件的振动特性(固有频率和振型),即结构的固有频率和振型,它们是承受动态载荷结构设计中的重要参数。同时,也可以作为其它动力学分析问题的起点。模态分析的要点是在积分运动方程以前,利用系统自由振动的固有振型将方程组转换为n个相互不耦合的方程,对这种方程可以解析或数值地进行积分。模态分析就是对以下几个方程的求解。
2 有限元模型的建立
由于四轴工业机器人的几何模型非常复杂,在ANSYS里面建模比较麻烦,所以使用专业的三维建模软件SolidWorks对机器人进行建模,并简化机器人的模型,根据圣维南原理,采用等效质量体代替,然后导入到ANSYS软件中。
本文中小臂使用的材料为铸钢,其弹性模量为7.1× 1010Pa,屈服极限560 MPa,,密度7 800 kg/m3。采用自由网格划分,网格总数为6 659,共有13 210个节点。小臂在实际工作过程中,只有绕Z轴的转动,因此将小臂下端连接处X、Y方向固定。
3 模态分析求解
将上面定义的约束添加到建立好的小臂模型,然后对小臂进行求解分析,得到小臂的各阶模态的振型,如图1所示。根据模态分析的结果,可以得出:小臂的固有频率较高,一阶固有频率已达到62 Hz,运动机构所采用的伺服电机额定转速为3 000 r/min,其回转频率为50 Hz,远小于小臂的一阶固有频率,因此小臂本身的刚度已满足设计需要,不需再提高其固有频率。小臂的固有频率虽已达到设计要求,但其固有频率偏低,这可能导致整个运动机构的固有频率更低,从而与激励频率发生耦合而产生共振,且其前两阶振型都主要表现为整体作平移振动,说明小臂上下两端刚度不足,比较薄弱,对整个运动机构的稳定性影响较大。为提高运动机构整体的固有频率,保证整体的稳定性,需要对小臂进行改进优化,加强其刚度。
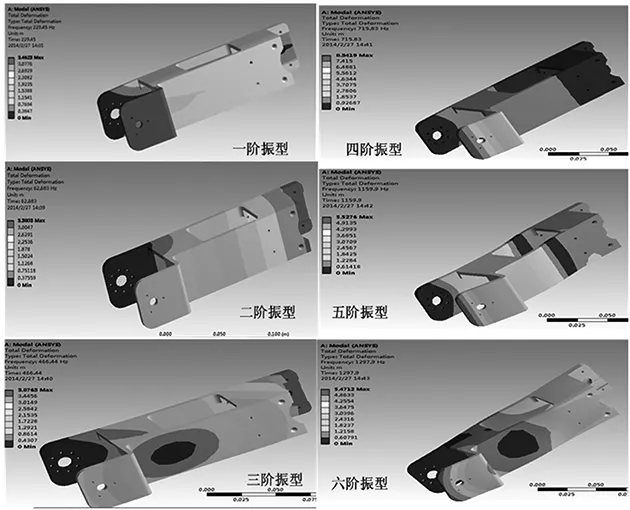
图1 模态振型
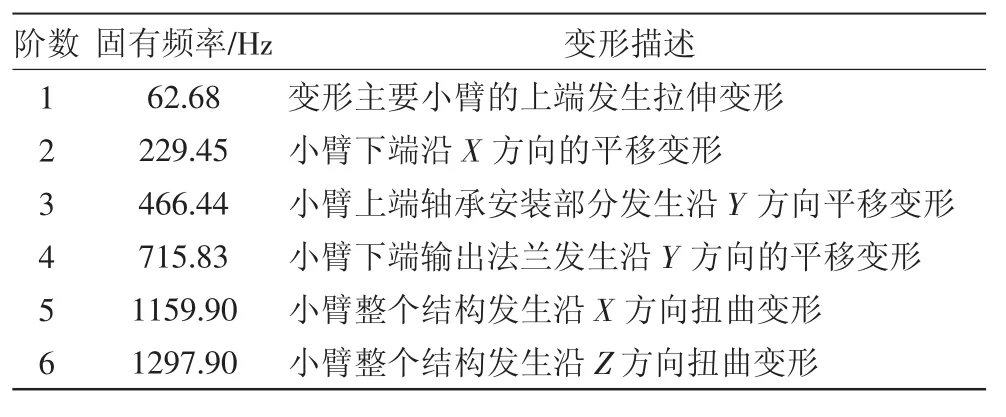
表1 小臂的固有频率和振型特征
4 结论
运用ANSYS建立了四轴工业机器人小臂的有限元模型,对小臂进行了模态分析,分析发现小臂的一阶固有频率高于电机的回转频率,小臂本身的刚度已满足设计需要,但是其固有频率还是偏低,特别是小臂上下两端刚度不足,比较薄弱,还需要对小臂进行改进优化,加强其刚度。
[1] 王昆,刘进福,莫贤,等.基于ANSYS Workbench的焊接机器人大臂预应力模态分析[J].机械工程师,2014(2):159-160.
[2] 张功学,田杨.基于ANSYS Workbench的变速自行车车架的有限元分析[J].微型机与应用,2009(6):63-65.
[3] 吕廷,石秀东.基于ANSYS的破碎机机架的模态分析[J].机械设计与制造,2008(11):99-101.
[4] 章华,孔晓玲,赵文龙,等.基于ANSYS Workbench的连续障碍圆饼的有限元分析[J].机械工程师,2011(2):81-83.
[5] 陈金玉,杨来侠.基于ANSYS Workbench的手机外壳的有限元网格划分研究[J].现代制造技术与装备,2008(1):58-60.
(编辑昊 天)
TP 391.7
A
1002-2333(2014)05-0154-02
郜福亮(1986—),工程师,研究方向为机器人及职能装备。
2014-03-03
猜你喜欢
力学与实践(2022年5期)2022-10-21
小读者之友(2022年4期)2022-05-20
兰州交通大学学报(2022年2期)2022-04-26
包装与食品机械(2021年5期)2021-11-06
华人时刊(2019年19期)2020-01-06
制造技术与机床(2019年12期)2020-01-06
特种结构(2019年2期)2019-08-19
组合机床与自动化加工技术(2019年5期)2019-05-24
山西建筑(2015年14期)2015-06-05
读者(乡土人文版)(2013年10期)2013-04-12