
在防空导弹控制系统中使用模糊监控调节器问题的探讨
2014-08-11 11:29苏晓丹
航天控制 2014年6期
苏晓丹
海军驻航天科工集团二院军代表室,北京100854
在防空导弹控制系统中使用模糊监控调节器问题的探讨
苏晓丹
海军驻航天科工集团二院军代表室,北京100854

介绍了现代空袭兵器战术技术性能改进对防空导弹制导控制系统形成的新需求,分析了现有制导控制系统在抗击高机动飞行器时面临的困难,探讨了在防空导弹控制系统中使用模糊监控调节器的问题。
防空导弹;控制系统;智能控制;模糊监控调节器
防空导弹主要用于抗击飞机、巡航导弹、战役——战术“地-地”导弹、各种无人机、制导炸弹等空袭兵器。采用最新的科学技术成果,使得这些空袭兵器的战术技术性能不断改进并能研制出超机动飞行器。第五代战斗机F-22、F-35、T-50和某些第三代战斗机苏-35、苏-37、 F-15、 F-16 、F-18A、米格-29、苏-27以及它们的改型,都拥有发达的机翼机构,升力、侧力直接控制结构,高性能的推力矢量控制发动机,从而使它们拥有超机动性能,能完成高难度的空中机动,如俯仰平面内的360°转弯(“福劳洛夫酒杯”)、迎角达150°的“眼镜蛇”机动、在空间悬停几秒的“钟”等模式。
飞行器机动性能的实质性改进使它们获得了智能机动的可能性,能够明显扩大武器的使用区域,减少进入防空兵器攻击区的时间并提高自身的安全性,其中包括完成更有效的躲避有控杀伤的机动。
当飞行器完成有针对性的机动时,会出现距离、速度和角坐标的三阶或者是更高阶的导数,会导致跟踪中断。由于扩大了被估计的状态矢量坐标的范围,飞行器的超机动性对跟踪它们的“面-空”导弹弹上制导系统的精度、快速性和稳定性提出了更苛刻的要求。如果空中目标在到相遇点前的2~4秒内以最大的加速度Wmj开始机动,在这种情况下是最有效的,这时能达到最大的防空导弹脱靶量,在这种脱靶量下战斗部引爆的概率实际上等于0[1]。上述情况对防空导弹制导控制系统的战技性能提出了新的需求。
1 问题的提出
当前,在目标机动、火力对抗、使用干扰和诱饵等不可监测的外部轨迹和信息作用不确定性以及导弹自身运动动态参数变化的条件下,防空导弹的控制系统还不具有自适应的工作性质。众所周知,控制系统的自适应程度应该既保证理想条件下的运行,也保证在各种干扰和破坏情况下的运行。
有一系列因素使对变化条件自适应的控制系统的综合问题变得非常复杂。1),未知的轨迹和干扰作用影响以及防空导弹参数的不确定性,不可能直接采用相应的控制补偿,这会破坏匹配条件;2) 当描述防空导弹飞行动力学的微分方程组阶数相对较高时,想直接测量状态矢量的所有坐标时就会遇到很大困难。
末制导系统品质的最重要的指标是其精度和工作的稳定性,这些指标与许多因素有关,其中包括控制系统的动态特性、扰动作用和发射导弹时刻的起始条件和目标的运动规律等。
近程末制导防空导弹(达5km)轨迹控制中使用的信息是导弹与目标的相对运动参数,这些参数的大小与目标机动有关,控制规律如下:
(1)
到防空导弹发射之前,通过指令生成装置的传递系数的变化,实现KK1和KK2的选择(例如,选择“追踪”或者是“迎面”射击状态),因此,若空中目标突然实现水平面内的180°转弯飞行时,这类导弹的飞行控制系统就不具备对射击条件变化的自适应性质。在不同阶段回路的传递系数可以相差几倍,这会导致末制导动态特性变差,其后果是防空导弹制导品质变差最终导致降低射击效能。
因此,产生了在防空导弹本体上设置调节器装置的设想,以保证在不确定条件下特别是在目标机动时导弹的制导。
对这一范围内研究成果的分析表明,在随动式测量仪器中适宜引入专用的装置(算法),以发现目标机动和根据实际情况修正(自适应)控制系统的参数或结构。
在以卡尔曼滤波为基础建立的最优测量仪器中,特别是在角度和距离跟踪滤波器中,作为机动开始的探测器和滤波器参数修正装置,可以使用偏差探测器、误差校正器中的附加的控制修正调节器。
例如,在射程达40km的中程末制导防空导弹中,用专用的弹上测量仪器,通过测量和估计包含在控制规律中的运动学参数,达到控制系统对变化的制导条件的自适应性。但是在近程防空导弹上,由于质量尺寸指标的明显限制,要完全实现上述想法是不可能的。

还有一系列限制最优滤波器在不确定性条件下使用的情况:1)误差放大系数是对完全确定的先验统计资料计算的,在测量仪器运行条件变化的过程中它们的值将与最优值有差别;2)状态矢量维数对卡尔曼滤波器的稳定性与发散性的影响是矛盾的,一方面,为提高模型对滤波器实际工作条件的符合精度而增加维数,会提高稳定性和降低估值发散的趋势;另一方面,这样的模型更加依赖具体的工作条件且不具备对这些条件变化的自适应性。对于工作在不确定性条件下的控制系统而言,后者特别不能接受;3)被综合的滤波器维数的增长导致计算误差的急剧提高,从而增强了发散的趋势;4)为了实现最优控制,必须有相对距离rx(t)变化规律的信息,这种信息在导弹本体上或者是通过直接测量而获取,或者是通过计算得到,而对于质量尺寸指标受限制的防空导弹,例如近程防空导弹,在导弹本体上测量相对距离rx(t)是不可能的[2-4]。
因此,必须研究末制导导弹控制系统综合的新方法,以克服上述缺点并保证在不确定条件下导弹的制导,有发展前景的是采用智能控制方法。
2 智能导弹简介
智能导弹在技术层面上要具有下列功能和特性:强自适应性、高识别能力、高灵巧性、高可靠性、使用方便性和高杀伤性。
智能导弹的主要组成包括:智能弹体结构、智能动力系统、智能制导控制系统、智能杀伤系统、智能抗干扰和突防技术、智能指挥控制通信情报和侦察系统、自维护系统和智能化基础技术。
智能导弹的控制系统应具有恶劣环境自适应能力、智能再规划能力、智能规避能力、跟踪高机动目标能力、自修复能力和高弹性弹体控制能力。
智能导弹可对战场情况进行自动探测、跟踪,根据获得的信息进行比较、分析、推理和判断,达到识别目标、背景和威胁的目的,进而制定出正确的对策、实施必要的机动动作。智能导弹控制主要由智能控制器完成,它接受外部信息,结合导弹自身的测量系统作出智能决策,并对目标自动探测、自动识别和自动捕获跟踪,最后摧毁目标[5]。
智能控制包括多级递阶智能控制、基于知识的专家控制、模糊控制、神经控制、基于规则的仿人智能控制、基于模式识别的智能控制和学习控制与自学习控制等[6]。当前,以模糊逻辑方法为基础的控制系统得到了非常广泛的推广应用,模糊控制是未来能够建立高性能控制系统的智能技术之一。
模糊自动控制系统是包含模糊逻辑推理结构模块的控制系统(见图1)。
图1 模糊推理模块结构图
系统的优点有:可以用于复杂的难以用简单数学模型描述的过程;以语义的形式形成关于控制对象或者是过程的专家知识;逼近传递函数的可能性;结构简单;具有鲁棒性或者是自适应性[7]。
模糊推理模块是非线性环节,这些环节的算子由知识库决定。模糊推理规则组成知识库并被模糊逻辑推理算法使用。模糊逻辑推理模块所处的位置是模糊控制系统的主要分类特征,在该情况下,模糊系统用自身形成的控制信号,或来自模糊系统的信号去控制传统的控制系统参数。本文介绍并探讨在防空导弹末制导系统中采用模糊控制方法的问题[8]。
3 在制导控制系统中使用模糊监控调节器问题
防空导弹末制导回路的典型结构图如图2所示。
图2 防空导弹末制导回路结构图

在该情况下,模糊逻辑自动控制系统按2级方式构成,在该系统的下面级使用传统的PID(比例、积分、微分)调节器,而在上面级使用被称为监控器的模糊系统,这种监控器根据系统中发生的过程对下面级调节器的参数进行修正,赋予下面级自适应或者是鲁棒性质(见图3)。
图3 具有模糊监控调节器的近程防空导弹的末制导回路示意图:Kφ1,Kφ2,Kλ,Kp—传统调节器工作修正系数
图3中FUZZY1和FUZZY2是模糊监控调节器,它们保证轨迹控制系统对防空导弹末制导条件(目标机动)的自适应;FUZZY3是保证姿态控制系统鲁棒性的调节器,特别针对作为对导弹法向加速度Wdd传递系数的变化不太敏感的系统。
将具有模糊模型的控制系统理论用于近程防空导弹轨迹控制系统的综合(图4),这种导弹采用能实现比例接近法的模糊监控调节器。被综合的运行算法能够考虑作为被控对象的防空导弹的非线性与非定常性特点,并保证了没有结构与参数自适应的高指标控制品质,同时保证了控制算法的硬件与软件实现的简单。
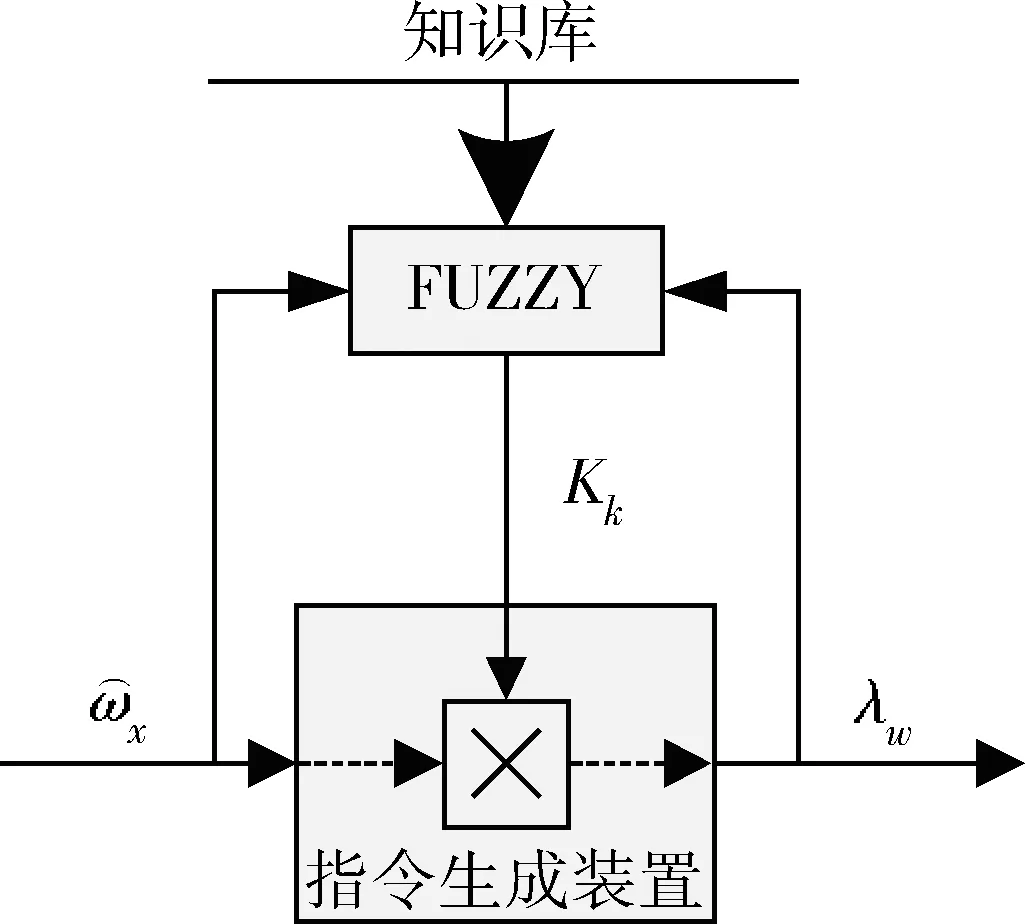
图4 具有模糊监控调节器的轨迹控制系统结构图
可以按下面的方法进行轨迹控制系统调节器的综合:1)确定自寻的防空导弹带模糊监控调节器的轨迹控制系统的结构;2)进行为构成模糊逻辑推理模块知识库(调节器参数的硬件知识)所需要的专家评估;3)形成模糊监控调节器模糊逻辑推理模块的算法。
专家评估的目的是确定修正系数KK值的变化范围,在这个范围内,在变化的导弹与目标接近的条件下,保证所需要的末制导动态指标值。为了在向机动目标制导时保持所需要的导弹的动态性能指标,必须实现制导回路传递特性的修正,特别是根据来自调节器输出端的信息,靠自动改变轨迹控制系统指令生成装置的传递系数来修正,这种调节器根据某个被估计参数的变化来监测目标的运动特点。
因此,专家评估的任务将是:1)确定信息参数的形式,利用这种形式可以测出在机动过程中目标运动特点变化的时刻;2)确定传递系数的值,保证在机动过程中目标运动特点变化时所需要的末制导动态指标;3)确定指令生成装置修正系数变化对监控机动目标运动特点的轨迹参数变化的运行依赖关系。


4 结论
由上面的讨论可以得出,防空导弹末制导系统可能在以下条件下工作:1)目标完成规避机动;2)不可能直接测量目标速度矢量及防空导弹自身运动参数所有坐标的情况;而自适应控制系统能够在理想的条件下,也可以在急剧变化的条件下,以很高的精度将导弹进行目标制导。上述情况给防空导弹自适应控制系统的综合形成了一定的困难。在近程防空导弹上,由于受质量尺寸指标的限制,难以安装制导所需要的能测量导弹与目标相对运动参数及其高阶导数的传感器,对于这类导弹来说,解决问题的途径之一是使用具有模糊监控调节器的控制系统。
[1] АИКанащенков ВМКорчагин Сверхманёвренность иборто выерадиолокационн ыесистемы Радиотехн ика 2002(5).
[2] 周慧钟,等.有翼导弹飞行动力学.航空专业教材编审组.
[3] 防空导弹武器制导控制系统设计[M].宇航出版社,.
[4] 徐南荣,王汉清.导弹制导系统.航空专业教材编审组,1984.
[5] 夏国洪,王东进,等.智能导弹[M].中国宇航出版社,2008,3.
[6] 李士勇.模糊控制神经控制和智能控制论[M].哈尔滨工业大学出版社,1998,9.
[7] 章卫国,杨向忠.模糊控制理论与应用[M].西北工业大学出版社,2001,2.
[8] КАВоробьёв Системыу правлениязенитныху правляе мыхракетсп рименениемнечётк огосупервизор ного регул ирования Автоматиз ацияисовременные технология
DiscussiononUsingFuzzyMonitoringRegulatorinAirDefenseMissileControlSystem
SU Xiaodan
Military Representative Office of Navy in the Second Research of CASIC, Beijing 100854, China
Regardingtheimprovementsofweapontacticalandtechnicalperformanceinmodernairattack,thenewrequirementsofguidanceandcontrolsystemforairdefensemissileareintroduced.Thenthedifficultiesofguidanceandcontrolsystemduringantagonizinghigh-maneuverablevehiclesareanalyzed,andfinallytheproblemofusingfuzzymonitoringregulatorinairdefensemissilecontrolsystemisproposed.
Airdefensemissile;Controlsystem;Intelligentcontrol;Fuzzymonitoring
2014- 10- 08
苏晓丹(1966-),女,吉林通化人,硕士,高级工程师,主要从事飞行器总体设计、制导控制、作战使用和质量监督研究。
TP316.2
: A
1006- 3242(2014)06- 0040- 04
猜你喜欢
装备制造技术(2020年3期)2020-12-25
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
太空探索(2014年1期)2014-07-10
