
快速交会对接若干关键技术问题研究
2014-08-11 11:29巩庆海宋征宇吕新广
航天控制 2014年6期
巩庆海 宋征宇 吕新广
北京航天自动控制研究所,北京100854
快速交会对接若干关键技术问题研究
巩庆海 宋征宇 吕新广
北京航天自动控制研究所,北京100854

综合相关文献,提炼出调相轨道设计,入轨精度对调相的影响评估和可变推力下入轨精度改进效果分析等快速交会对接关键技术问题。对比天宫和国际空间站的对接模式差异,比较分析了3种备选快速对接调相轨道的优缺点,给出了合理可行的实现建议。仿真分析表明,圆调相轨道、增大轨道差和双调相轨道配置有利于快速交会对接的灵活实现。通过对调相轨道和入轨精度匹配性的量化分析,提出了运载火箭进一步提高入轨精度的实现方法,为快速交会对接方案提供了有益参考。
快速交会对接;轨道调相;运载火箭;迭代制导;入轨精度
快速交会对接指飞船在升空后较短时间内,与目标完成交会对接任务。以俄罗斯的载货和载人飞船为例[1],在6个小时以内(围绕地球飞行4圈左右)就与国际空间站进行对接,而以往飞船则要绕地飞行34圈,花费近2d时间才能完成对接。由于快速交会对接模式较传统模式有提高飞行安全系数和航天员舒适性、节省燃料等一系列优点[2-4],俄罗斯对快速对接模式已进行多年研究,开展了大量的准备工作,并在地面进行了充分测试[4-5]。为实现快速对接模式,国际空间站轨道高度在2011年6月从350km提高到了400km[4,6]。在过去的2年里,俄罗斯已成功地完成了8艘飞船与国际空间站的快速交会对接[2-6]。
传统模式到新模式的转变带来了一系列技术问题和挑战,国内外在相关文献中也多以事件报道为主,较少就技术内容展开深入讨论,有针对性的原理、技术和实现细节等可借鉴内容并不多。
国外近年关于快速对接的原理和研究主要见诸于俄罗斯交会对接专家Murtazin等发表的文章,具有很高的借鉴价值。文献[7]描述了交会对接调相策略的演进历史,分析了快速调相策略的实现方法。文献[8]介绍了四圈交会模式及调相时机分析,给出了进步号货运飞船飞行试验中的调相条件。文献[9]对比了2天交会模式与“五圈”及“四圈”交会模式,简要总结了快速模式在进步号货运飞船的应用,并提出了“四圈”交会模式的改进建议。
国内尚未见专门针对快速交会方案的文献报道,研究仍基于传统的多圈交会模式。其中,罗亚中等[10]分析了含调相段方案的优势,总结了调相轨道设计的主要约束条件,评述了调相变轨参数规划研究现状。朱仁璋等[11]详细分析了追踪星飞行各阶段时间与相位差的对应关系,给出了2种极限状态调相方案,根据分析设计出了一个具体的调相飞行方案。刘世勇等[12]开展了飞船地面导引段的变轨调相策略分析和误差影响分析,给出的分析方法结果具有一定工程参考意义。张进等[13],王帅等[14]的工作则侧重轨道调相控制律及参数优化设计,未涉及调相轨道的配置。
本文从调相方案和策略这一快速交会对接中的关键问题展开研究,给出了调相轨道设置与调相角及调相时间之间的规律,并结合载人航天项目现状和发展趋势,提出了几种调相实施方案,对各方案的可调范围进行了量化分析。针对快速对接对运载火箭入轨精度提出的高要求给出了调相轨道配置建议,进行了仿真分析,提出了运载火箭进一步提高入轨精度以适应快速对接要求的实现方法。
1 快速交会对接的技术难点[7-9,15]
1)可靠性要求更高。任务时间大幅压缩,约为原来的1/8,时间非常紧迫,各时序排列紧密,对各环节实现准确性和软硬件的可靠性要求非常高,一旦出现故障等异常状况时,若无法快速解决,则无法继续后续环节,可能造成任务延长甚至任务失败,如俄进步号M-19M飞船就因导航天线系统故障未实现快速对接,而退回到传统对接模式;
2)快速模式给灵活选择发射时间带来限制。由于减小了初始相位角,从原来的270°减小到30°左右,约为原来的1/9,兼顾测控支持范围、轨道调相和备份窗口等一系列与交会策略及窗口选择相关的设计难度会大大增加;
3)对运载火箭和飞船的控制精度要求更高。由于任务时间短,若需要消除前一次控制形成的较大偏差,耗费燃料会更多,因此,无法保证各环节控制精度的情况下,采用快速模式可能得不偿失;
4)对自主控制要求更高。需要以飞船自主控制方式替代传统的靠地面指令注入进行轨道转移的控制方式,以提高响应速度和可靠性。
2 快速交会对接调相原理及模型
2.1 轨道调相过程
为节省燃料的目的,开始自主接近段之前,目标飞行器需超前追踪飞行器一个预设提前角。若目标器与追踪器不符合预先设定的相角条件,则追踪器必须通过在轨道上等待或进行机动来弥补或消除相角偏差,待满足时再开始转移,这一过程即轨道调相过程。
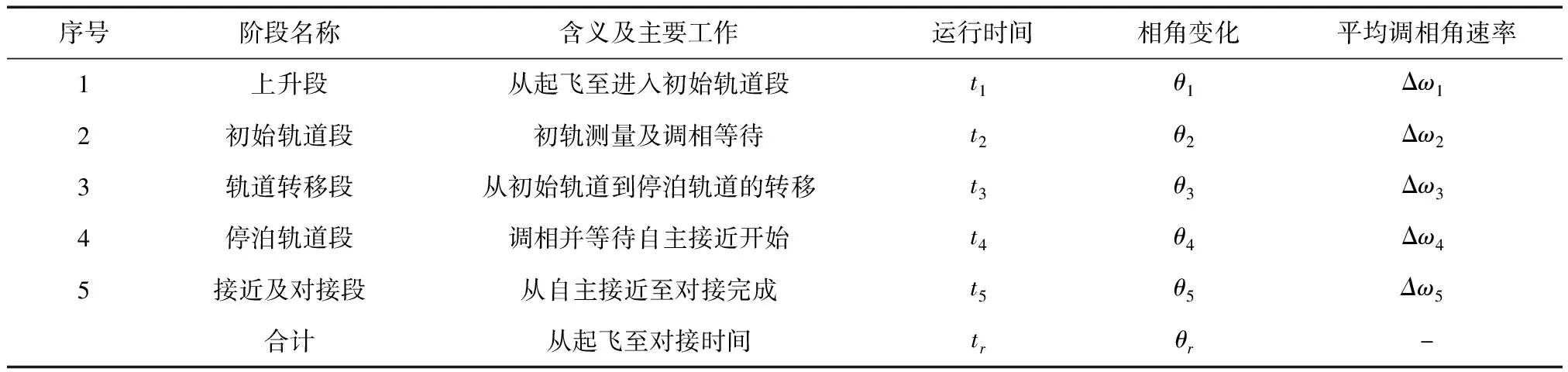
表1 交会对接任务阶段划分及参数定义表
2.2 从传统模式到快速模式
传统模式下,初始调相角(飞船入轨时刻空间站位于飞船前的角度)都很大,如“联盟TM”飞船与“和平号”空间站设计的初始相位角为240°±90°,即可调范围在180°左右[16],这一范围在“联盟TM”飞船与国际空间站对接任务中扩大至270°。而在快速模式下,随着过程时间缩短,初始相位角大幅下降,相应的可调范围也大幅下降。因此,调相问题的解决策略成为最显著的变化之一。
2.3 调相问题转化为数学问题的求解形式
由表1分别得到相角与时间关系式:
θr=θ1+θ2+θ3+θ4+θ5
(1)
tr=t1+t2+t3+t4+t5
(2)
此处假定上升段、轨道转移段、接近及对接段所需时间是确定的(即t1,t3,t5设为已知定值),其中忽略了一些偏差小量,诸如入轨时间偏差等,在任务初步分析阶段这种假定是可行的。各轨道参数确定后,Δω1~Δω5也就相应确定了,设为已知定值。考虑到虽然以上每个阶段均有一定程度的调相作用,这里将调相工作主要安排在初始轨道段和停泊轨道段,其它3个阶段调相范围是相对固定的(即θ1,θ3,θ5设为已知定值),则有以下2式:
Δω2·t2+Δω4·t4=θ2+θ4=θr-θ1-θ3-θ5
(3)
t2+t4=tr-t1-t3-t5
(4)
从上2式可见,只有t2和t4两个参数为未知数,代入相关参数,联立求解两式,即可确定初始轨道段调相时间和停泊轨道段调相时间,从而确定整个交会对接各任务节点和流程。t2和t4的解均应为正值,否则说明调相任务不可达,需重新进行任务规划。
3 调相轨道规律分析与配置
3.1 不同调相时间内,可调相角与调相轨道的关系
对于典型的载人交会对接轨道,分别以400km圆轨道(对应国际空间站轨道)和344km圆轨道(对应天宫轨道)为目标轨道,分析调相时间、可调相角与调相轨道高度的对应关系。

图1 调相轨道高度、调相角与调相时间的对应关系
如图1(a),固定目标轨道时,同一调相时间内,可调相角大小随调相轨道高度升高而下降,呈线性变化趋势。以调相时间4h为例,在200km调相轨道上,可调整约43.0°相位角,而在380km调相轨道上,仅可调整约4.2°相位角。图1(b)与1(a)中规律是一致的,但随着目标轨道高度降低(400km至344km),同样时间(4h)内,在200km调相轨道上,可调整约31.3°相位角,对应缩小了11.7°。
如图2(a),固定目标轨道(400km)时,同一调相角对应的调整时间随调相轨道提高而延长。以调相角20°为例,在200km调相轨道上,调整时间约1.9h;在300km调相轨道上,调整时间约3.8h;而在380km调相轨道上,调整时间约19.2h。图2(b)与(a)中规律是一致的,但随着目标轨道高度降低(400km至344km),同样调相角(20°),在200km调相轨道上,调整时间为2.6h,比前者增加了0.7h。
在同一调相时间内,调相角随调相轨道高度增加而减小;相应地,对于同一调相角,调相时间随调相轨道高度增加而增大。因此,增大调相轨道和目标轨道的轨道差可减小调相时间并扩大调相角范围,利于快速对接和扩大窗口选取范围。

图2 调相轨道高度、调相时间与调相角的对应关系
3.2 我国交会对接轨道调相策略及实施现状[17]
我国载人航天工程目前采用的是拱点交会控制策略。以神舟八号任务为例,其交会调相过程如下:
第5圈远地点:提高近地点高度;
第16圈近地点:提高远地点高度;
第19圈远地点:轨道圆化;
第28圈:开始自主接近。
可见,在拱点交会控制策略模式下,若以椭圆轨道作为调相轨道,则在调相轨道上运行时间必然是N或(N+1/2)个轨道周期,即轨道半周期的整数倍,这就造成了调相区间的不连续,使用不灵活。而在近圆轨道上调相,则可减少轨道机动次数,节省燃料、提高可靠性和减小测控压力。
3.3 快速对接轨道调相策略
增大调相范围有2种手段:1)调高目标轨道;2)降低调相轨道。主要影响分析如下:
1)调高目标轨道,会引起任务总体上燃料消耗增大,辐射、电离层影响变大,轨道回归周期变长(俄罗斯载人、载货飞船与空间站的对接采用了此方式,从350km轨道调高至400km轨道,轨道回归周期由2d变为3d);
2)降低飞船初始轨道,会引起轨道衰减,但由于运行时间不长,轨道衰减程度有限;在其它条件不变的情况下,降低初始轨道使运载能力相应提升。
由此,提出了以下几种调相轨道设计方案:
方案1:初始轨道设定为200km圆轨道,目标轨道为400km圆轨道,将停泊轨道设定为380km圆轨道,采用拱点控制策略,则转移轨道设定为200×380km的椭圆轨道,这样主要可利用的调相轨道就由初始轨道和停泊轨道2部分构成。由此前分析的调相规律,初始轨道可调相角范围大,停泊轨道可调相角范围小,2者分别构成了可调相角的上下限,2者之差即可调窗口宽度;
方案2:初始轨道、转移轨道、停泊轨道设定均类似于方案1,仅目标轨道为344km的圆轨道(接近天宫轨道);
方案3:最接近于神舟系列飞船目前的实现方式,初始轨道和停泊轨道均可作为调相轨道,由于初始轨道为椭圆轨道,其调相区间并不连续。
3种方案的对比如表2所示,表中加粗部分为所设计的调相轨道。
3.4 不同调相方案下的可调区间范围比较
以可调相时间范围为4.5h(约对应3圈轨道飞行)为例计算,将以上3种方案对应的理论可调区间列于表3中。
由表2和3可知,对于我国交会对接任务而言:方案1的好处是窗口宽度大,而目标轨道及初始轨道均需调整,总体方案改动最大;方案2的好处在于目标轨道高度不需调整,仅调整飞船发射初轨,缺点是窗口宽度相对方案1稍小;方案3虽然理论上存在15.8°的窗口宽度,但由于其轨道特性造成的调相区间不连续,使用起来很不灵活,因此,并不适宜应用。
可见,方案1和2是较为可行的方案,国际空间站为实现快速模式选择了接近方案1的实现形式,将轨道高度从350km提高到400km左右。

表2 不同调相方案下的轨道设置

表3 不同调相方案下的可调区间范围(°)
4 火箭入轨精度影响分析及改进
4.1 入轨散布对可调区间范围的影响

图3 考虑火箭发射入轨散布的调相区间示意图
图3中A点为初始调相角上限点;D点为初始调相角下限点;B点为考虑“发射入轨散布”初始调相角上限点;C点为考虑“发射入轨散布”初始调相角下限点。
在极限条件基础上,讨论考虑入轨散布的影响。图3中,θr1对应可调初始调相角下限,θr2对应可调初始调相角上限,考虑入轨散布θk之后,则可调初始调相角下限变为(θr1+θk),可调初始调相角上限变为(θr2-θk),则总的初始调相角压缩了2θk,即可调弧段从AD压缩至BC。仍以可调相时间范围为4.5h为例,设θk按2°考虑,重新计算表3的可调范围,结果如表4所示。

表4 考虑“发射入轨散布”的可调区间范围
由表4可知,采用方案1时,极限的窗口条件也只有39.7°,相对于可调范围在270°左右的传统模式,窗口出现了大幅的压缩,仅为原来的1/7左右。由于要实现与目标交会,发射时刻必须同时满足平面窗口条件和相位窗口条件,而相位窗口的大幅压缩,也进一步压缩了可发射窗口区间[18]。
若任务中出现超出表中上下限的情况,调相角关系难以满足,则需要进行额外的轨道机动和调整,快速交会对接模式将较难实现。在表4基础上,考虑其它限制条件后,可调区间会被进一步压缩。
除上述提到的对发射窗口的影响,入轨散布对后续时序排布的影响也值得分析。由2°调相角散布对应的调相时间可知,对于400km目标轨道,在200km初始轨道上调相约需12min;对于344km目标轨道,在200km初始轨道上调相约需15min,若考虑在转移轨道上调相消除2°调相角则需花费更长时间。由于要考虑这部分可能存在的浮动,直接影响了后续时序的排布。
通过分析与计算,验证了文献中提及的国际空间站提高轨道高度需求、快速交会对接初始相位角在30°左右和提高入轨精度需求等相关技术内容,并得到如下规律:
1)增大调相轨道和目标轨道的轨道差可扩大调相角范围,利于扩大窗口选取范围;
2)与椭圆轨道相比,采用近圆轨道作为调相轨道更为灵活;
3)有2段调相轨道使任务更为灵活,不安排特定的调相轨道,而以合适的初始轨道和停泊轨道兼做调相轨道对简化任务有利。
4.2 入轨精度分析及改进
入轨时刻的相位角偏差θk如下式
θk=Δuk+Δω·Δtk
(5)
式中,Δuk为入轨时刻的纬度幅角偏差,Δω为当前轨道与目标轨道间的角速率之差,Δtk为入轨时间偏差。由于Δω·Δtk项较小,因此θk主要取决于Δuk。
以某型运载火箭发射近地轨道飞船为例,在制导方法及导航方式的不同控制方式组合下,通过注入各种典型的方法误差项和工具误差项,对入轨精度Δuk进行仿真统计,结果如表5所示。

表5 各种状态下纬度幅角偏差统计表(°)
由表5可见,纬度幅角偏差散布在各种情况下差异不大,即该偏差对制导方法和导航方式均不敏感。造成偏差的主要原因是:1)传统的发射任务中,一般不对纬度幅角做具体约束,且受限于控制维数,运载火箭的制导方法主要关注半长轴、近地点高度、近地点幅角、升交点经度和轨道倾角等5个参数的指标满足情况,制导律中未对纬度幅角施加控制;2)通过对引起纬度幅角偏差的原因深入分析发现,引起该项误差的主要项是发动机秒流量偏差和比冲偏差等发动机工况偏差,2者引起偏差约占总偏差的一半以上。实质上,纬度幅角基本取决于目标轨道面内的航程,而这一点又在很大程度上取决于发动机工况。由于现有运载火箭发动机尚无法对发动机工况进行较大范围的主动控制(如秒流量大小调节等方式),因此,对于涉及发动机工况变化引起的纬度幅角偏差,现有制导和控制算法是无法克服的。
借鉴类似能量管理的方式来克服该偏差是一个解决思路,但为保证足够的燃料余量用于克服发动机工况偏差,需要运载火箭增大燃料加注量,这会引起载荷质量和箭体结构甚至总体方案的相应变化,从经济性和系统优化角度不宜采用。
我国在载人运载火箭精度提升方面做了很大的努力,所采用的“迭代制导+组合导航”的设计方案能够保证除纬度幅角外其它5个轨道参数同时高精度满足[19-21]。因此,相对摄动制导而言,迭代制导方法更具优势,且迭代制导可在射前灵活地变更初始轨道高度和倾角等参数配置,可为实现快速交会对接模式提供技术支撑。
运载火箭入轨是一个需要对多约束同时满足的命题。随着可变推力发动机的逐步推广应用,推力大小调节作为一维控制变量引入,也逐渐成为制导律的改进方向,这是减小纬度幅角偏差散布的另一个解决思路。
在现有综合入轨精度最高的迭代制导算法中引入推力调节控制,兼顾原有5个轨道参数约束,同时保证纬度幅角控制精度的改进算法是值得深入研究的。初步研究表明,假设运载火箭末级推力具有±10%的可调范围,并通过建立推力调节与制导算法的对应关系,则纬度幅角偏差散布可减小到1°以内,同时,其它5个参数仍保持较高的控制精度。
5 结论
综合相关文献,提炼出调相轨道设计,入轨精度对调相的影响评估及可变推力下入轨精度改进效果分析等快速交会对接的关键技术问题。对比现有天宫和ISS的对接模式差异,比较分析了3种备选快速对接调相轨道的优缺点,给出了合理可行的实现建议。通过对调相轨道和入轨精度的匹配性的量化分析,为快速交会对接方案提供了有益参考。
分析及仿真表明:1)圆调相轨道、增大轨道差和双调相轨道配置能够扩大调相区间,有利于快速交会对接的灵活实现;2)采用变推力发动机结合迭代制导算法能够保证包括纬度幅角在内各参数较高的入轨精度,为快速交会对接提供良好的初始条件。
[1] 佚名.俄罗斯货运飞船首次测试快速对接模式[J].载人航天,2012,18 (5):37.
[2] 庞之浩.精彩纷呈的2013- 全年国际航天热点盘点[N].中国航天报,2013- 12- 27(3).
[3] 贺颖骏.俄“快速对接”发射载人飞船,明年初或彻底过渡到新发射模式[N].新华每日电讯,2013- 3- 30(3).
[4] 张晓东.俄“联盟”号载人飞船首次与国际空间站快速对接[N].人民日报,2013- 3- 30(3).
[5] 诸葛.2012年的俄罗斯航天活动[J].国际太空,2013(2):32- 41.
[6] 阳光.2012年全球航天活动回顾(中)[J].中国航天,2013 (3):14- 22.
[7] Rafail F Murtazin, Sergey G Budylov .Short Rendezvous Missions for Advanced Russian Human Spacecraft[J].Acta Astronautica,2010,67:900- 909.
[8] Rafail Murtazin, Nikolay Petrov.Short Profile for the Human Spacecraft Soyuz- TMA Rendezvous Mission to the ISS[J]. Acta Astronautica,2012,77:77- 82.
[9] Rafail Murtazin, Nikolay Petrov. Usage of Pre- flight Data in Short Rendezvous Mission of Soyuz- TMA Spacecraft[C]. 63ndInternational Astronatical Congress, Naples, Italy. 2012. IAC- 12- B3.2.7.
[10] 罗亚中,张进,李海阳,唐国金.空间交会调相轨道设计和变轨规划研究评述[J].载人航天,2009,15(1):19- 24.(Luo Yazhong, Zhang jin, Li Haiyang, Tang Guojin. Survey on Rendezvous Phasing Trajectory Design and Maneuver Plan[J].Manned Spaceflight, 2009,15(1):19- 24.)
[11] 朱仁璋,杨溢,李颐黎,林彦.航天器交会飞行设计方法研究[J].中国空间科学技术,2006,26 (1):9- 16.(Zhu Renzhang, Yang Yi, Li Yili, Lin yan. The Overall Design Method of Spacecraft Rendezvous[J].Chinese Space Science and Technology,2006,26(1):9- 16.)
[12] 刘世勇,彭利文.空间交会对接调相轨道误差特性分析[J].载人航天,2010,16(1):46- 52.(Liu Shiyong, Peng liwen. Analysis of the Orbit Phase Error Characteristics of Space Rendezvous and Docking Mission[J]. Manned Spaceflight,2010,16(1):46- 52.)
[13] 张进,罗亚中,唐国金,李海阳.空间交会调相综合变轨优化[J].航天控制,2009,27(1):15- 19.(Zhang jin, Luo Yazhong, Tang Guojin, Li Haiyang. Optimization of Rendezvous Phasing Strategy with Hybrid Maneuvers[J]. Aerospace Control, 2009,27(1):15- 19.)
[14] 王帅,尚海滨,崔平远,黄翔宇.小推力地球卫星圆轨道同轨调相设计方法研究[J].宇航学报,2013,34(1):1- 8.(Wang Shuai, Shang Haibin, Cui Pingyuan, Huang Xiangyu. Study on Design Method of Low- Thrust Phasing Maneuvers for Earth Circle- Orbit Satellites[J]. Journal of Astronautics, 2013,34(1):1- 8.)
[15] Pete Harding.Progress M- 16M Successfully Tests New Fast Rendezvous with ISS[EB/OL].[2012- 08- 01]. http://www.nasaspaceflight.com/2012/08/progress- m- 16m- launch- test- new- fast- rendezvous- iss.htm.
[16] 戚发轫.载人航天器技术[M].北京:国防工业出版社,1999:30- 49.
[17] 王忠贵.我国首次空间交会对接远距离导引方案设计与飞行验证[J].中国科学:技术科学,2012,42(7):764- 770.
[18] 李九人,李海阳,蒋自成.空间救援发射窗口分析[J].国防科技大学学报,2008,30(1):10- 14.(Li Jiu- ren, Li Hai- yang, Jiang Zi- cheng. The Analyze of the Launch Window for Space Rescue Mission[J]. Journal of National Univercity of Defence Technology, 2008,30(1):10- 14.)
[19] 宋征宇.从准确、精确到精益求精—载人航天推动运载火箭制导方法的发展[J].航天控制,2013,31(1):4- 10.(Song Zhengyu. From Accurate,Precise to Perfect- Manned Space Promotes the Development of Guidance Method on Launch Vehicle[J]. Aerospace Control, 2013,31(1):4- 10.)
[20] 吕新广,宋征宇,巩庆海.运载火箭轨迹预测制导方法研究[J].载人航天,2013,19(6):20- 24.(Lv XinGuang, Song Zhengyu, Gong Qinghai. Research on Trajectory Prediction Guidance for Launch Vehicle[J]. Manned Spaceflight,2013,19(6):20- 24.)
[21] 吕新广,宋征宇.载人运载火箭迭代制导方法应用研究[J].载人航天,2009,15(1):9- 14.(Lv XinGuang, Song Zhengyu. Study of the Iterative Guidance Engineering Application to Manned Launch Vehicle[J]. Manned Spaceflight, 2009,15(1):9- 14.)
StudyonSeveralKeyTechnicalProblemsofFastRendezvousandDocking
GONG Qinghai SONG Zhengyu LV Xinguang
Beijing Aerospace Automatic Control Institute, Beijing 100854, China
Derivingfromrelativedocuments,thekeyproblemstobeconsideredandsolvedofthemodechangearepresented,includingphasingorbitdesign,insertprecisionimpactonphasingandtheanalysisofinsertprecisionimprovement.BycomparingwiththerendezvousanddockingmodebetweenTianGongandtheISS,themeritsanddrawbacksofthethreecandidatephasingorbitsaredemonstratedalongwithareasonableproposal.Thesimulationresultsindicatethatthecirclephasingorbit,augmentationoforbitheightdifferenceandtwophasingorbitsaremoreflexiblefortheapplicationoffastmode.Byquantitativelyanalyzingofphasingorbitandinsertprecisionmatching,someusefulproposalsforfastrendezvousanddockingareprovided.
Fastrendezvousanddocking;Orbitphasing;Launchvehicle;Iterativeguidance;Insertprecision
2014- 03- 27
巩庆海(1980-),男,黑龙江鸡西人,高级工程师,主要研究方向为运载火箭制导系统设计;宋征宇(1970-),男,江苏靖江人,研究员,主要研究方向为运载火箭控制系统设计;吕新广(1978-),男,山东青州人,高级工程师,主要研究方向为运载火箭导航与制导技术。
V448.2
: A
1006- 3242(2014)06- 0016- 06
猜你喜欢
少儿科学周刊·少年版(2022年19期)2022-05-30
当代水产(2019年1期)2019-05-16
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
太空探索(2016年12期)2016-07-18
太空探索(2016年9期)2016-07-12
太空探索(2016年9期)2016-07-12
太空探索(2016年6期)2016-07-10
北京航空航天大学学报(2016年4期)2016-02-27
创业家(2015年1期)2015-02-27
