松下琴键式开关自复位原理分析及难点对策
2014-11-06 03:18田赡民林海平
机电工程技术 2014年7期
唐 明,田赡民,林海平
(1.惠州市华阳数码特电子有限公司,广东惠州 516005;2.公牛集团有限公司,浙江宁波 315314)
1 提出问题
松下电工株式会社在我国家用固定式开关市场上推出了一种具有自复位功能的琴键式开关(申请号01102173.X)[1],这里的自复位功能是指对开关进行通或断操作,改变其通断状态之后,操作件自动恢复到初始位置,而通断状态保持不变。这种开关的优势是对于“二开”以上的开关其操作件永远平整,整洁美观,如图1所示[2],同时为用户提供一种新的操作方式。
目前国外一些大公司有同类产品[3],但均有专利保护且技术难度大,国内只有个别公司[4-5]有此种开关,也有一些公司有此战略考虑[6-7],但没有产品上市。本文对松下琴键式开关自复位原理进行了剖析并提出了对策,希望对读者有所收益。

图1 自复位开关与普通开关外形比较
2 自复位开关的基本结构介绍
图2所示是根据松下琴键式开关自复位原理而设计的一种自复位开关,共分为三部分:第一部分是操作零部件,即图2中的开关操作件4;第二部分是复位机构零部件,即图2中的垂直复位滑块5、水平复位弹性滑块6及复位弹片7;第三部分是与普通开关通用或类似的零部件,即图2中的支撑柱1、跳板2、支架3、银触点9、摆杆组件8及后座10。其基本运动原理如下:开关操作件4在操作力P的作用下可以绕其铰链4A转动,其交叉筋组成的平面4B推动垂直复位滑块5的凸筋5A,从而复位机构动作并推动摆杆组件8绕其铰链8B摆动,最后跳板2翻转改变开关的通断状态,之后去除操作力P,开关操作件4及复位机构的零部件在复位弹力的作用下回到初始状态,开关的通断状态保持不变。复位机构是本文研究的重点,下面重点加以讨论。

图2 自复位开关总图
3 复位原理分析及技术难点
(1)复位原理分析
初始状态时,如图2所示,垂直复位滑块5及水平复位弹性滑块6在复位弹片7的弹力作用下有向上运动的趋势,由支架3的钩角3A限位而处于最高位置。在两弹性臂62A与垂直复位滑块5上的凸台5B侧面接触而形成的平衡力作用下,水平复位弹性滑块6处于中间位置。
开始工作时,开关操作件4在操作力P的作用下其平面4B推动垂直复位滑块5的凸筋5A克服复位弹片7的反弹力,垂直复位滑块5及水平复位弹性滑块6同时向下运动。摆杆组件8的顶点8A与水平复位弹性滑块6的凸台61A之间的间隙随之被消除,至图3所示的特征位置。此间隙是机构运动所必需的,没有此间隙机构将不能运动。消除此间隙而产生行程为空行程。

图3 第二特征位置
随着垂直复位滑块5继续向下运动,摆杆组件8的顶点8A将通过凸台61A推动水平复位弹性滑块6相对垂直复位滑块5向右作水平运动,并使两个弹性臂62A的一个产生更大的弹性变形,另一个逐步恢复至自由状态,同时水平复位弹性滑块6也推动顶点8A使摆杆组件8绕其铰链8B摆动,图4是摆杆组件8摆至垂直状态的特征位置。
垂直复位滑块5继续向下运动,顶点8A继续推动水平复位弹性滑块6向右作水平运动,已变形的弹性臂62A继续产生更大的弹性变形,同样水平复位弹性滑块6也推动顶点8A使摆杆组件8摆动至另一方向的终止位置,凸耳8C的另一端与支架3接触,开关的通断状态发生改变,图5是该状态的特征位置图。
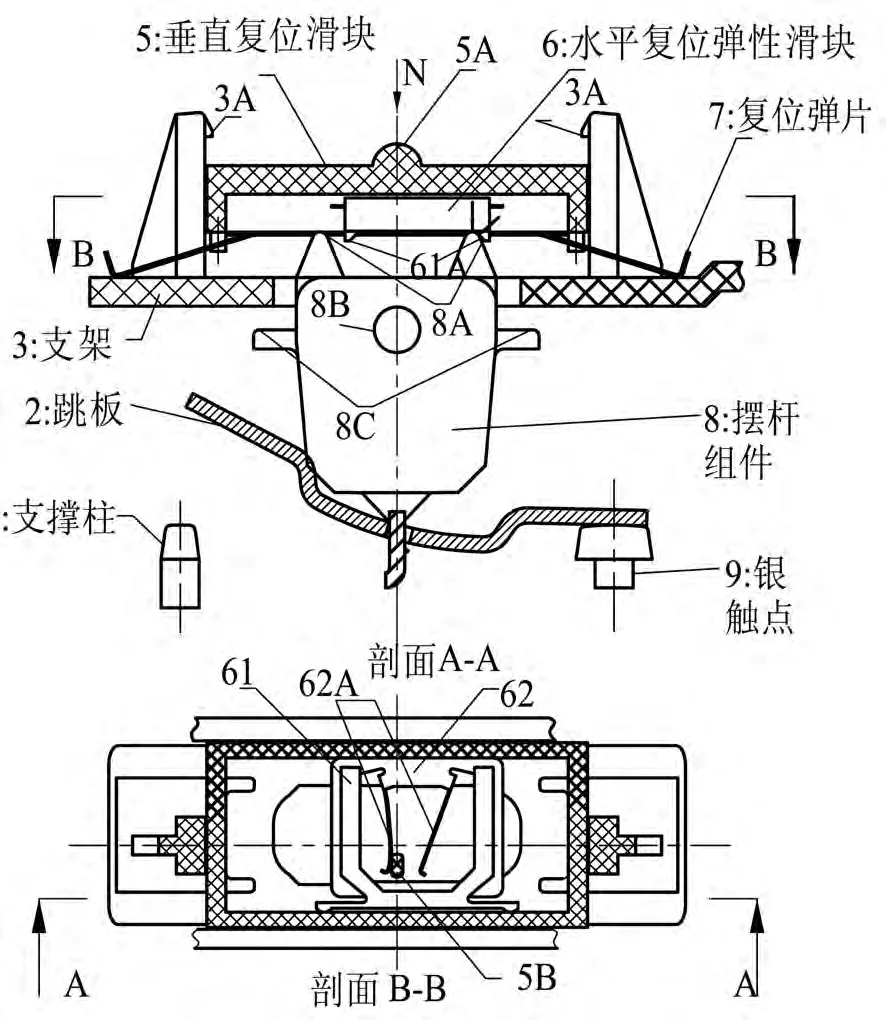
图4 第三特征位置

图5 第四特征位置
开关的通断状态改变之后,去除操作力P之后,垂直复位滑块5在复位弹片7的反弹力作用下向上复位,直至支架3的钩角3A限位。与此同时水平复位弹性滑块6在变形弹性臂62A反弹力的作用下向中间复位,直至两弹性臂62A与凸台5B侧面均接触而形成平衡状态处于中间位置,其特征状态如图6所示。由此可见,水平复位弹性滑块6是根据弹力平衡来定位的。此时对开关再进行操作,垂直复位滑块5的运动与上述过程相同,其余零件的运动方向相反,不再重述。

图6 第五特征位置
(2)技术难点

图7 复位误差分析
通过以上的原理分析可以看出,水平复位弹性滑块是由弹性臂的弹力来复位,并根据两个弹性臂的弹力平衡来定位的,对弹性臂的疲劳性及尺寸精度要求很高。如果复位的位置误差大而使水平复位弹性滑块6的凸台61A与摆杆组件8的顶点8A对不正,即存在图7所示的复位误差,则当垂直复位滑块及水平复位弹性滑块向下运动时,摆杆组件的顶点8A顶不到水平复位弹性滑块凸台61A的斜面,以致水平复位弹性滑块不能水平移动或向中心方向(与正确方向相反)移动,机构动作失灵。基于上述要求“松下”采用了图8所示的基本结构,它由0.08 mm不锈钢冲压件62及PA66塑料部分61注塑而成,图中细长臂61B是为了装配时零件不掉下而设置的,其最薄处只有0.3 mm,如果此尺寸过大则会阻碍水平复位弹性滑块的复位动作。由于该零件尺寸小、生产中易变形、材料要求高及注塑最薄处只有0.3 mm,其注塑工艺难度非常大。
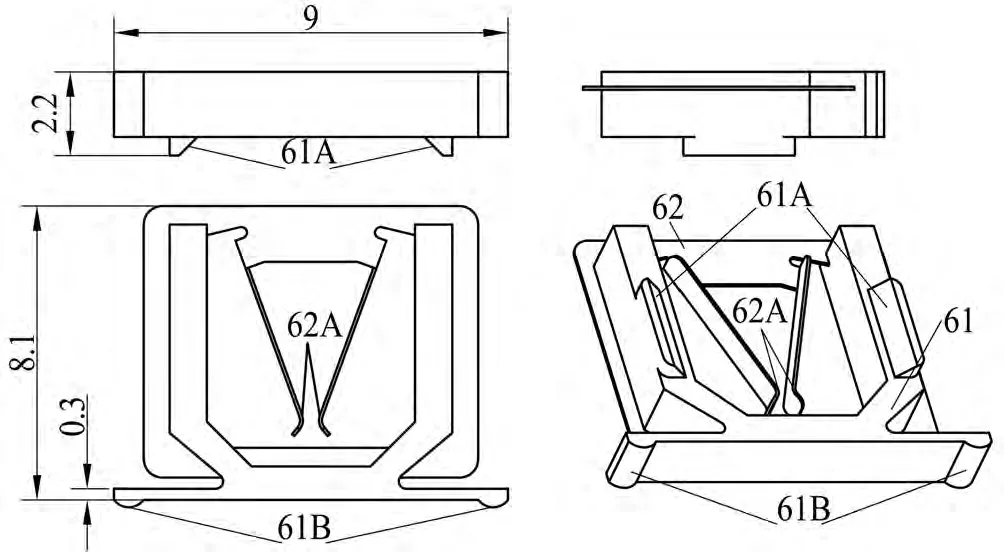
图8 水平复位弹性滑块结构
4 解决方案
根据上述分析,对水平复位弹性滑块进行重新设计。如图9所示,我们将原塑钢复合件的设计方案改为两个零件,一个是不锈钢冲压件62,另一个是注塑件61。原来的两弹性臂62A由中间夹紧凸台5B侧面改为两边夹紧注塑件61的侧面,这样避免了高难度的塑钢复合件注塑工艺,同时也突破了“松下”的结构专利,而没有改变机构的复位原理。

图9 改进后的水平复位滑块结构
5 试验
对改进后的设计方案进行了试验,试验证明动作可靠。
6 结论
新的结构方案避免了高难度的塑钢复合件,突破了“松下”的结构专利,且动作可靠。
[1]琴键式开关[P].申请号:CN 01102173.X.
[2]一种按键式开关[P].申请号:200510037162.3.
[3]按钮操作式摇臂开关[P].申请号:200680002967.7.
[4]翘板式开关[P].申请号:200920238406.8.
[5]轻触式复位墙壁开关[P].申请号:200420119193.4.
[6]自动复位开关[P].申请号:200920051058.3.
[7]连杆复位机构开关[P].申请号:200520059854.3.
猜你喜欢
传感器世界(2022年7期)2022-12-12
流体机械(2022年5期)2022-06-28
工程技术研究(2021年1期)2021-03-20
塑料包装(2019年6期)2020-01-15
设备管理与维修(2019年14期)2019-06-16
现代机械(2018年5期)2018-11-13
摄影之友(影像视觉)(2018年10期)2018-11-06
山西化工(2016年6期)2016-04-09
山西化工(2016年6期)2016-04-09
山西化工(2016年6期)2016-04-09