沿轨道运动的六自由度机械手运动学仿真研究
2014-12-03 02:15王和平史文涛
焦作大学学报 2014年4期
王和平 史文涛
(焦作制动器(集团)有限责任公司,河南 焦作 454000)
0. 前言
移动机械手的研究日益受到国内外的重视,我国在移动机械手的理论方面做的工作较多,而在实践上做的较少。所谓移动机械手,一般而言就是将机械手安装在移动平台之上。这种结构使机械手拥有几乎无限大的操作空间和高度的运动冗余性,并同时具有移动和操作功能,这使它优于移动机器人和传统的机械手,因此在危险作业、制造业、服务业等行业具有广阔的应用前景。但由于结构复杂、强耦合、非线性、非完整性等问题的存在,都使得对移动机械手的研究具有相当的挑战性。特别是在对移动平台的设计上,存在着诸如导航、定位等问题使得加大了研究的复杂性。而在很多工业生产的特定环境当中,很多生产加工环节都是在固定的生产线上完成的,不需要复杂的移动轨迹。于是本文提出了一种基于轨道行走的移动机械手,可以沿特定的轨道移动,以达到在结构化环境当中快速、准确地移动到指定位置完成规定的任务。
本文就机械手沿不同倾斜角度的轨道运动过程中机械手的运动学问题进行了研究,对其运动学模型进行转化和仿真,将关节变量的变化及末端坐标以曲线图的形式直观、准确地表达出来,为今后进一步研究该方式的移动机械手提供了理论上的支持,并为移动机械手的运动学分析提供了新思路。
1. 六自由度机械手运动学分析
1.1 运动学模型建立
当六自由度机械手在具有一定倾斜角度的轨道上行走时,由初始位置A走至B点如图(1)所示。将基坐标系设在A点,在机械手各关节位姿不变的情况下,机械手末端的坐标位置A′、B′会受轨道倾斜角度及沿倾斜轨道方向的位移距离AB的影响。轨道倾角通常为0~30度不等。显然,倾斜角度越大,AB之间的距离越远,对机器人末端的坐标位置的影响也越大,故在该机械手的运动学分析中需引入轨道倾角及沿轨道前进的距离作为运动学参数的一部分。

图1行走于倾斜轨道的六自由度机械手关节结构示意图
为了能够较为准确地对机械手末端位置进行跟踪,针对沿倾斜的轨道上的运行特点,将该机械手的行走机构抽象为两个运动关节,将旋转关节作为根关节用来模拟不同倾斜角度轨道,另外一个关节为伸缩关节可模拟行走机构沿倾斜轨道方向的位移AB,将一个沿倾斜轨道移动的机械手转化为一个具有固定机座的机械手模型,由此建立8自由度机械手运动学模型。通过此方法对该机器人的运动学转化模型分析,进而对不同关节变量的机械手末端坐标位置进行计算及仿真。
1.2 D-H参数设计
机械手是由一系列连接在一起的连杆 (杆件)构成,各杆件之间由可进行旋转或伸缩的运动关节进行连接,可使连杆绕关节进行旋转运动的关节为旋转关节,可使连杆沿关节方向进行伸缩移动的关节为移动关节。
为描述相邻杆件间平移和转动的关系,采用D-H法对每个关节处的杆件坐标系建立4×4齐次变换矩阵。由固定基座向机器人末端方向将机械手的各关节从1到i进行编号,使用四个参数对机器人相邻关节间的相对位置进行描述,分别用相邻两关节公共法线距离ai表示连杆长度;垂直于ai所在平面内两轴的夹角αi为连杆扭角;di为两连杆的距离,θi为两连杆的夹角。

图2 连杆坐标系及参数
如图2所示,将z轴定义为沿关节轴方向,x轴定义为沿ai方向并指向下一关节。其中四个参数的ai为zi轴与zi+1轴沿xi轴方向的距离;ai为 zi轴与 zi+1轴绕xi轴转动的角度(右手定则);di为 xi-1轴与 xi轴沿 zi轴方向的距离;θi为 xi-1轴与 xi轴沿 zi轴旋转的角度 (右手定则)。
由机械手模型得出,结合D-H参数法对机器人进行坐标分析,得出在一定倾斜角度轨道上运行煤矿灾害信息探测机器人的连杆坐标系如图3所示,其中第二个关节为移动关节定义其关节类型为1,其变量范围根据摄像头最远可视距离确定,故移动范围为0~8000mm。其余七个关节均为转动关节,定义关节类型为0。参照该机械手模型进行运动学转化,该机械手的运动学转化模型中的连杆参数如表1所示。

图3 煤矿灾害信息探测机器人的连杆坐标系
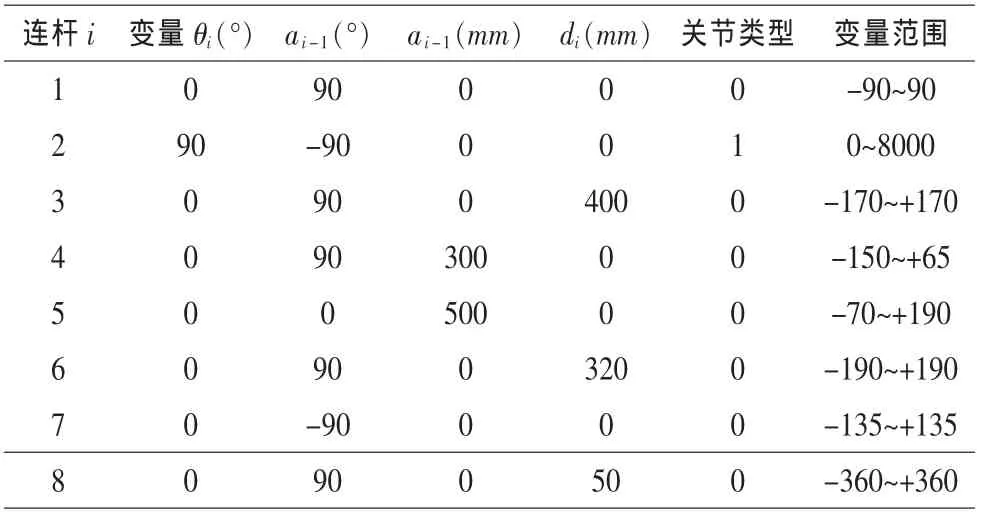
表1 六自由度机械手运动学转化模型连杆坐标参数
1.3 运动学正解
从关节变量求机器人末端的位置称为运动学正解,只要给定各关节的位移量便可求得机械手的运动学转化模型中机器人末端坐标及姿态,机械手末端连杆坐标系与连杆坐标系的关系可由i-1T8表示为:

根据该机械手相邻连杆的相对位置的齐次变换及表 1所示连杆参数,求得各连杆变换矩阵如下。

故机械手运动学转化模型末端连杆的变换矩阵T为:

1.4运动学逆解
机械手的逆运动学即给定末端连杆的位姿及坐标,求各关节变量的值。对于机械手,其所要求的关节变量为 θ1,d2,θ3,θ4…θ8。 其中,在同一倾角的轨道上运行时,机械手的第一关节θ1为给定值且为恒定值,即为常量,其它7个关节变量均可以在一定取值的范围内进行变动。 故1T0也为常量,该运动学逆解共需求 d2,θ3,θ4…θ8共7个值。当给定煤矿灾害信息探测机器人运动学转化模型的末端连杆变换矩阵T,可使用未知的连杆逆变换左乘方程两边,将关节变量分离出,其求解方程如下:

2. Matlab运动学仿真
2.1 运动学仿真
Matlab软件中的Robot Toolbox工具箱可进行该机械手转化模型正运动学仿真分析,本文采用改进的DH参数进行仿真,轨迹规划使用点到点(PTP)的规划方法,并编写了正运动学仿真程序。将机械手的D-H参数输入后,为了清楚地显示模型各部分的结构令θ1=pi/2,d2=100,并由drivebot命令得出该机械手运动学转化模型三维图如图4所示。可通过jtraj函数来设置关节变量及手动拖动运动学正解控制面板如图5所示,来对机械手的关节变量进行设置,能够得到信息探测机械手的不同姿态。
由于机械手在具有一定倾斜角的轨道上行走时,该运动学转化模型中的第一个关节的角位移为恒定值,即起始点处关节1的变量值和终点处关节1的变量值相同。定义轨道倾角θ沿水平方向顺时针转动所得倾角为正,反之为负,则由机械手运动学转化模型连杆坐标系得出轨道倾角与机械手运动学转化模型中关节θ1之间的关系:当机器人行走在倾角为+θ的轨道中时,θ1=θ1=pi/2+θ;当机器人行走在倾角为-θ的轨道中时,θ1=-(pi/2-θ)。
将机械手运动学仿真程序中在各关节运动范围内分别输入的起点及终点的变量值,即可模拟出该机器人运行过程,各关节变化轨迹及末端坐标轨迹。假设取起始点为 θ1=2*pi/3+θ,d2=0,θ3=θ4=θ5=θ6=θ7=θ8=0, 终点θ1=2*pi/3,d2=300,θ3=0,θ4=pi/3,θ5=0,θ6=pi/4,θ7=pi/4,θ8=pi/4时,得出其末端坐标轨迹图如图6所示。将终点各关节变量值代入(2)式得:

改变关节 1的变量值,令 θ1=pi/2,此时可模拟在水平轨道运动的机械手,并保持其它关节变量不变,其末端旋转矩阵为:

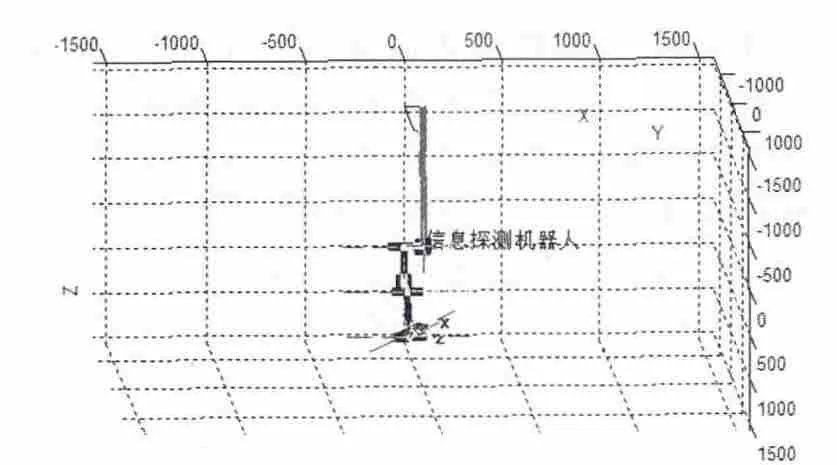
图4 六自由度机械手运动学转化模型图

图5 机器手运动学正解控制面板

图6 六自由度机械手运动学模拟及末端坐标轨迹图
2.2仿真结果分析
通过以上仿真过程,可看到该六自由度机械手转化模型从A点运动到B点时各关节的运动过程及末端坐标的变化轨迹。关节末端坐标的变化过程均为平滑曲线,且末端终点坐标值与变换矩阵所得结果一致,验证了仿真结果的正确性。且通过对比不同轨道倾角的末端坐标系位姿得出:轨道倾角对机器人末端坐标值存在影响,且能够通过此模型准确地计算机器人的末端坐标值。
3. 结束语
本文提出了一种沿轨道运动的六自由度移动机械手,通过轨道这种简单的移动方式,可以使建造复杂的机械手移动平台问题简单化,并对沿轨道运动的六自由度机械手的运动学模型转化。可使用简单的MATLAB程序实现该机器人在具有一定倾斜轨道上的运行过程及各关节位姿变化的跟踪及模拟,解决了机械手移动过程中针对不同的轨道倾角对机械手运动学的影响。采用D-H参数法对该模型进行分析,为移动机器人的运动学分析提供了新的思路,同时为该机器人的智能控制研究提供了运动学基础。
[1]董文杰,徐文立.移动机械手的鲁棒控制[J].控制理论与应用,2002,19(3):345—348.
[2]徐保国,尹怡欣,殷路,等.智能移动机器人技术研究进展[J].仪器仪表学报,2007,28(4):683—685.
[3]A1tafini C.Inverse kinematics along a geometric spline for a holonomic mobilemanipulator.Proceeding of the 2001 IEEE International Conference on RobotiCS&Automation.200l:1265—1270.
[4]赵艳云,方漪.五自由度机器人手臂运动学研究[J].科学技术与工程,2009,(6).
[5]雷春丽,芮执元.码垛机械手运动学分析[J].现代制造工程,2009,(11).
[6]李晓燕,张翔,陈立伟.基于VC6.0和O penGL机械手三维仿真演示系统[J].计算机工程与设计,2004,(6).
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年2期)2020-12-14
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2018年11期)2018-11-23
汽车实用技术(2017年16期)2017-09-21
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
海军航空大学学报(2015年1期)2015-11-11