
二维粒子形状分类技术在云微物理特征分析中的应用
2014-12-13 08:26王磊李成才赵增亮姚志刚韩志刚魏强
大气科学 2014年2期
王磊 李成才 赵增亮 姚志刚 韩志刚 魏强
1 北京大学物理学院大气与海洋科学系,北京 100871
2 北京应用气象研究所,北京 100029
1 引言
云是影响气候变化的重要因子,在地气辐射收支中起着重要的调节作用(Ramanathan et al.,1988)。云能够影响短期和局地的天气过程,也能够影响大气环流及全球气候变化,是大气科学研究的重点之一。云的微物理特征是描述云特征的重要方面,对气候研究、数值模式中的云参数化方案(Shupe et al.,2008)和大气遥感中云辐射特征的确定(Lohmeier et al.,1997;Schols et al.,1999;Young et al.,2000)有十分重要的作用。
云微物理特征包括云相态、粒子浓度、粒子谱分布、液水含量、冰水含量、消光系数、有效粒子半径等。对于混合云和冰云来说,给出准确的云中冰晶粒子形状是计算含水量、云相态、消光系数、有效粒子半径等参数的重要前提。目前,非球形冰晶粒子的散射特征仍然是大气辐射计算中的难题之一(廖国男,2004),但云粒子形态也是其散射特性准确计算的必要前提。
由于飞机能够直接进行穿云,使得飞机探测成为获取云微物理参数最有效的手段之一。20世纪70年代美国的R G Knollengerg建立了粒子测量公司,并生产出一系列用于飞机探测的仪器测量设备(Particle Measuring Systems,PMS),这些粒子测量设备能够自动完成对粒子的取样、测量和记录,具有取样频率高、取样尺度分辨率高等特点,可以对大范围云系进行连续观测(刘卫国等,2003)。20世纪70年代时,国际上就开始广泛使用PMS公司的光电探头进行云微物理参数探测(游来光,1987)。粒子测量系统中用于测量云微物理特征参数主要包括基于光散射法用于测量粒子尺度的仪器和基于光阵扫描技术用于测量粒子形状的仪器(郭学良和郑国光,2010),其中利用光散射法测量粒子尺度的仪器主要有前向散射仪 FSSP(Forward Scattering Spectrometer Probe)(2~97 μm)、云粒子组合探头 CCP(Cloud Combination Probe)、云粒子探头 CDP(Cloud Droplet Probe)(2~50 μm);利用光阵扫描测量粒子形状的仪器主要有二维光阵探头 OAP-2DC(Two Dimensional Cloud Optical Array Probe)(33~1056 μm)、二维光阵探头 OAP-2DP( Two Dimensional Precipitation Optical Array Probe)(200~6400 μm)、二维灰度探头 OAP-2D- GA2(Two Dimensional-Grey Cloud Optical Array Probe)(30~1920 μm)、和云粒子图像探头 CIP(Cloud Imaging Probe)(25~1550 μm)等。
利用光阵扫描测量粒子的仪器能够测量100 μm 以上的云粒子,特别是能够精确识别冰晶粒子的形状,这对于混合云和冰云的微物理特征描述具有重要的意义。针对二维图像进行粒子分形有许多不同算法。Heymsfield and Parrish(1979)利用粒子图像尺度和图像面积与等量直径球形面积比率之间的关系来获取粒子形状。Rahman et al.(1981)利用由理想冰晶粒子图像得到的不同的几何参数和最大似然法进行形状识别。Hunter et al.(1984)利用包括快速傅里叶变换半径频率、尺度参数和图像中遮蔽像素数目构建的向量进行形状识别。Holroyd(1987)利用无量纲几何比率进行冰晶粒子图像分类。Duroure et al.(1994)利用单个粒子的图像面积S和图像周长P之间的关系来描述粒子的形状。Moss and Johnson(1994)采用一种图形识别技术进行云粒子的分类。Garbrick et al.(1995)提出了一种基于神经网络技术的分类方法。Korolev and Sussman(2000)采用简单的无量纲比值,利用飞行采样水平方向和垂直方向挡光点数的比值,冰雪晶粒子挡光面积和外接周长面挡光点数等关系,将粒子形状分为4种,即球状、不规则状、针状和枝状。
我国自20世纪80年代初开始引进了这一测量系统,截止2008年,约有十套PMS系列产品在实际中进行应用,应用单位主要集中在各省市的人工影响天气部门和气象科研机构(郭学良和郑国光,2010),张佃国等(2007)利用PMS仪器获取的4次探测资料对北京及周边地区的云系微物理特征进行了分析。齐彦斌等(2007)利用 PMS仪器和其他资料对一次东北冷涡中对流云带的云微观特征进行了分析。范烨等(2010)利用北京及周边地区三次锋面的 PMS探测结果对层积云结构进行了分析。尽管已有探测设备获取了大量的中国区域的观测数据,但对二维粒子图像分型技术的研究和应用相对较少,其中可能的原因之一是由于 PMS为国外引进,对于二维粒子图像原始数据的读取和分析仍存在一定困难。郭金平(1996)利用 13个飞行架次中 PMS获取的冰、雪粒子二维图像分析了霰粒子出现频率及尺度谱特征,对云中过冷水累积含量进行了估算。赵增亮(2010)利用粒子挡光面积、粒子尺度、粒子周长、以及挡光面积与粒子尺度的比值等参数把粒子分为球状、板状、星状、柱状、针状和雪片状六种形状,并对卷云的微物理特征进行了统计分析。
为了有效提取二维图像探头获取的信息,本文首先简单介绍了二维光阵探头的工作原理,随后具体给出了二维图像分型算法,以及液水含量、冰水含量和粒子浓度的计算方法,然后应用二维图像分型技术针对2006年4月6日在北京地区的一次飞机探测结果进行简要分析,最后就本研究结论进行讨论。
2 二维光阵探头
二维光阵探头在内部有一个由多个光阵元件组成的阵列,高度平行的 He-Ne激光会投射到该光阵上,当粒子进入激光束时,其阴影会遮挡住光学元件,使光强减弱,而每个光学元件后部带有一个前置放 大器,可将光阵元件的遮挡编码信息传送至探头存储器中。当探头确定该粒子为有效粒子后,便会将该粒子的编码信息转存至探头的数据采集系统中,完成一 个粒子的识别。为了获取方正的图像,确保探头在飞机飞行方向上和光学阵列上得到同等大小速率的粒子采样,在二维光阵探头内部设置有一个数据采集系统 DAS(Data Acquisition System),该系统可以自动确定图像的切片采集速率,每当粒子移动和光阵元件宽度相等的距离便产生一个切片采样,OAP-2D-GA2的最大图像切片采样速率为4 MHz。 二维灰度光阵探头属于二维光阵探头的一种,灰度探头能够将粒子的挡光程度分为四档:当光强减弱大于75% 时为最大挡光,当光强减弱小于75%且大于50%为中等挡光,当光强减弱小于50%且大于25%时为最小挡光,当光强减弱小于25%时为不挡光。对不同挡光程度的光学元件配以不同的颜色进行显示时,可以使粒子特征更加清晰。其中OAP-2D-GA2属于二维灰度探头,其光阵由64个光学元件组成,每个光学元件的分辨率为30 μm。二维光阵探头在对粒子尺度测量时会产生误差(Strapp et al.,2001),由于仪器的非零响应时间会导致低估粒子的尺度和数浓度,由于光阵的非连续性会导致误判粒子尺度,由于光阵衍射效应会导致高估大粒子的尺度。
3 二维图像形状分类技术
自然界的冰晶粒子会呈现出许多不同的形状,随着微观粒子观测仪器的发展,冰晶粒子被分为各种各样的类型,然而几乎每一个研究者都有自己分形的种类。典型冰晶主要有柱状、板状、聚合状、枝状等类型。Nakaya(1954) 把云中冰晶粒子分为 41种类型。Zamorsky(1955)把冰晶粒子分为了 72 种类型。Magono and Lee(1966)针对自然界的冰晶对Nakaya((1954)的分类方法进行了补充,并给出了 80 种粒子形状。Korolev et al.(2000)将冰晶粒子形状分为球状、不规则状、针状和枝状四种类型。实验室研究表明(Rottner and Vali,1974),冰晶受环境的温度、湿度的影响会呈现出一定的形状。
由于可以通过对冰晶的形状和维度计算单个冰晶的质量,从而使计算二维探头尺度范围内云中的液水含量和冰水含量成为可能。本文采用Holroyd(1987)提出的形状分类方法把粒子二维图像分为8类,分别是:微小状、线状、聚合状、霰状、球状、六角形状、不规则状和枝状。这里的线状是指粒子形状分布呈线性状态,主要包括针状粒子和柱状粒子。本文利用OAP-2D-GA2二维灰度探头获取的粒子图形进行形状分类算法研究。
3.1 参数设置

图1 分型中所用几何测量参数示意 Fig.1 Measurements used in the habit classification analysis.xis the pixel number of the array image in the direction of aircraft flight,andythe pixel number inthe direction of the optical array,the perpendicular direction to the aircraft flying direction;d is the pixel number on the longest span length of the particle obtained from the coordinates taking thex direction as the abscissa and they direction as the ordinate;wis the pixel number on the d-perpendicular direction,the width of the particle
在二维图像分型中使用到多种形状几何测量参数(见图1)。x为飞机飞行方向上的粒子像素点数;y为光学阵列方向上的粒子像素点数;d为像素点在以x方向为横坐标和以y方向为纵坐标的最小二乘法拟合后得到的方向上粒子跨越长度(像素点数);w为在d垂直方向上的粒子宽度(像素点数);r为x和y方向上图像像素点的相关系数;A为粒子的方向角度;a为粒子图像的面积(像素点数的平方);P为粒子图像的周长(像素点数);F为特定几何参数,设置为F=Pd/a(无量纲量);Nx为x方向上的挡光像素点个数;Ny为y方向上的挡光像素点个数;Ntotal为图像所有挡光像素点个数;Nedge为x方向图像边缘上的挡光像素点个数。这 里所有参数的计算均要考虑挡光程度大于25% 以上的像素点。
3.2 周长计算
由于粒子图像形态千差万别,精确计算图像周长是其中的难点之一。这里粒子图像周长的计算参照 Korolev and Sussman(2000)提出的方法进行计算。设定原始图像为 Apic,计算共分五个步骤:第一步,把图像向上移动一个像素点位置后与原始图像Apic像素点相加,此时的图像上每个点的位置会有一个或者两个像素点,这里算法会自动把包含两个像素点的位置转为零个像素点,这时会得到图像Bpic;第二步,与第一步相似,只是把图像 Apic向左移动一个像素点位置后再与图像Apic相加,得到图像 Cpic;第三步,把图像 Bpic和图像 Cpic相加得到图像Dpic;第四步,把图像Bpic向右移动一个像素点位置后与图像 Cpic相加,得到图像 Epic;第五步,把图像Dpic和图像Epic相加后,设置一个像素点为零个像素点,得到图像 Fpic。这时的图像 Fpic中,水平和垂直方向上每个位置的像素点为两个,而斜线方向上位置的像素点为三个。最终利用下式计算图像周长:

其中,N2和N3分别为包含两个像素点和三个像素点位置的个数,δ为二维探头的像素点分辨率,Np为周长像素点数,这里OAP-2D-GA2的δ为30 μm。该算法由于同时考虑了图像在水平方向上和斜线方向上的长度,因此可以比较精确的估计二维图像的周长。另外,该算法中利用了对像素点进行矩阵的整体移动计算,对于每次飞行获取的大量图像粒子来说,能够较好的节省计算时间,提高计算效率。
3.3 抛弃粒子的识别
在OAP-2D-GA2获取的粒子中,会有大量的粒子识别为抛弃粒子。抛弃粒子图像主要包括两类:一类是由于电信号的干扰导致的图像,此类图像的特点是在某个方向上有间断而另一方向上会有条状挡光,呈规则的条带状;另一类是在一个图像采集上有多个粒子或者破碎粒子出现。参照 Korolev and Sussman(2000)的设置,判定满足Ntotal≤180,Nedge>4,Ny<32的图像为抛弃粒子,另外考虑到电信号噪声能够产生在y方向上充满像素点的间隔图像,所以把y方向上出现间断的粒子判别为抛弃粒子,图2给出了部分抛弃粒子的采样个例。
3.4 分型方法
当图像粒子去除了抛弃粒子后,采取多步骤依次判别的方法对图像进行形状识别。在每个步骤判定形状后,其不满足判定条件的粒子进入下个判定步骤。这里把粒子形状分为8种类型,分别是微小状、线形状、聚合状、霰状、球状、六角形状、不规则状和枝状。判别步骤如下:
(1)微小粒子由于太小无法对其准确判断进行球形和非球形的判定,故首先识别微小粒子,这里设定a<18的粒子为微小粒子;
(2)判别满足r2≥0.4,或满足x≥4y,或满足y≥4x的粒子为线形状粒子;
(3)由于聚合状粒子的面积较大,判定满足d>133个像素点的粒子为聚合状粒子;
(4)霰状粒子具有较大的密集分布特征,设置S为y方向上像素点连续排满32个像素点个光阵列数与Ntotal的比率,为无量纲值,判定S>0.35的粒子为霰状粒子;
(5)针对d>53的大粒子,若F≤13则判定为霰状粒子,其余粒子判定为聚合状粒子;

图2 所选择抛弃粒子采样个例 Fig.2 Examples of rejected particle images
(6)判定F<5.5的粒子为球形粒子;
(7)针对F<10的粒子,若d<26判定为六角形状粒子,其余粒子判定为霰状粒子;
(8)判定F<16或者x≤6的粒子为不规则粒子,其余粒子为枝状粒子。
文中所采用的方法主要是在 Holroyd(1987)和 Korolev and Sussman(2000)提出的两个方法基础上建立的,他们的方法主要是基于OAP-2DC探头,而国外针对二维光阵探头开发的粒子图像分析技术大多是针对OAP-2DC探头,该探头的主要特
点是其单个光阵的光阵元件是 32个,分辨率为 25 μm,而本文中所采用的OAP-2D-GA2探头的光阵元件是64个,分辨率为30 μm。这里我们采用了Holroyd(1987)提出的粒子几何比率参数设置,由于大多数参数无量纲,所以没有改变无量纲量的参数,而对于涉及粒子大小的判别条件则根据经验做了适当的修正。表1给出了Holroyd(1987)判别条件和本文所用判别条件的差别。图3给出了分形方法可识别8种类型粒子的采样个例。
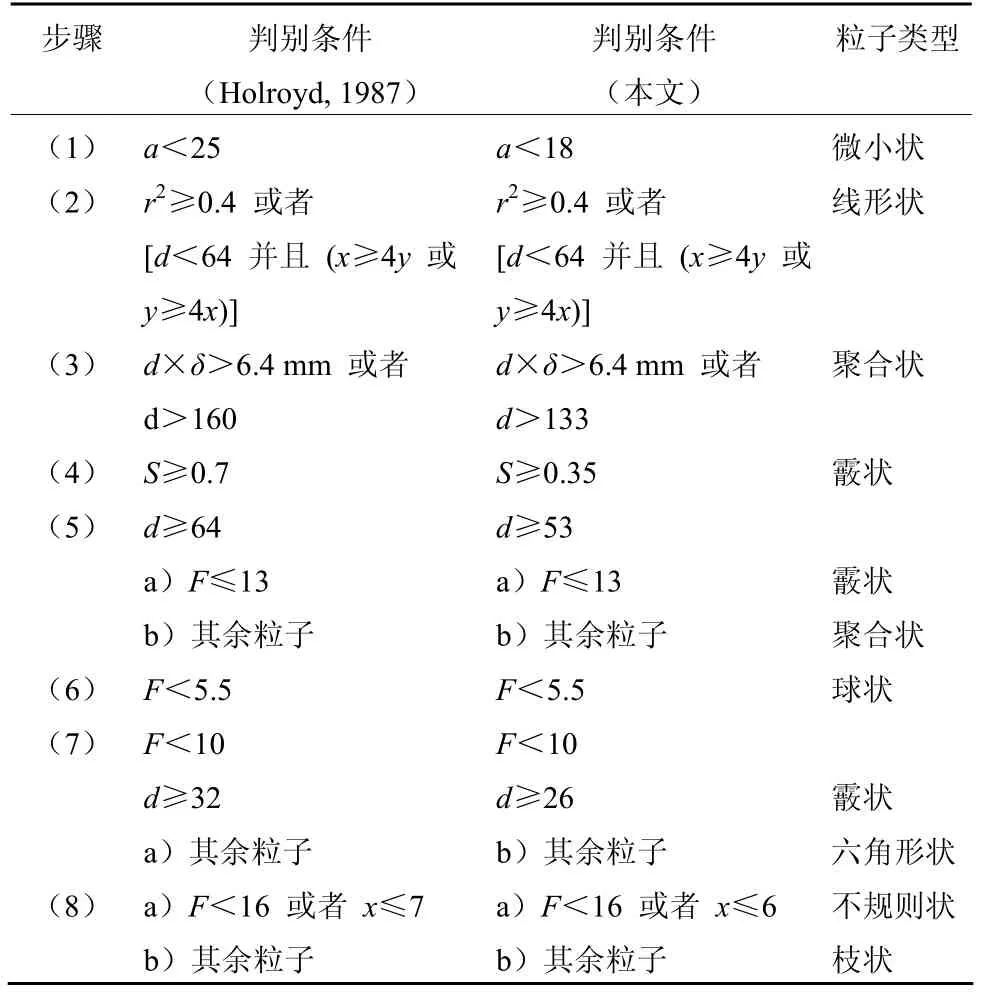
表1 Holroyd(1987)与本文所用粒子形状判别流程 Table 1 The order of decisions in the habit classification in Holroyd(1987)and in this paper
4 含水量计算
FSSP在测量时假定粒子为液滴来进行散射测量,液滴和冰晶的复折射指数差异会来到误差,当粒子直径为3 μm时粒子浓度的相对误差为10%,当粒子直径大于 10 μm 时,相对误差为 4%(Gayet and Febver,1996)。Fleishauer et al.(2002)认为当有冰晶粒子存在时,利用FSSP计算的混合相云液水含量会有一定的误差,然而根据 CPI(Cloud Particle Image)获取的粒子图像分析当液滴半径大于24 μm时,液滴仅占1.3%,可以认为FSSP捕获了绝大多数的液滴,由于本文中分析的云层为中层云,不涉及到卷云,所以这里假定FSSP获取的粒子为液滴。
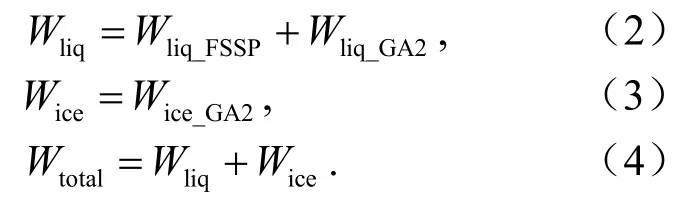
针对每次飞机探测资料,设Wliq为液水含量(式2),Wice为冰水含量(式3),Wtotal为总水含量(式4),其中Wliq_FSSP为FSSP探头计算的液水含量,Wliq_GA2为OAP-2D-GA2探头计算的液水含量,Wice_GA2为OAP-2D-GA2探头计算的冰水含量。
可利用 OAP-2D-GA2获取粒子图像的分型结果,结合冰晶粒子的含水量经验公式,计算出云的液水含量、冰水含量和总水含量,其中总水含量为液水含量和冰水含量之和。这里假设微小状粒子和球形粒子为液水粒子,其余粒子为冰晶粒子。由于分形为“抛弃”粒子是伪粒子或其他粒子,所以并不把其计入液水含量,同时也不计入其采样体积,这样就避免了“抛弃”粒子带来的偏差。表2给出了液水含量和冰水含量的计算公式,其中π为圆周率,粒子质量M的单位为g,D=d×δ,W=w×δ,单位均为μm。
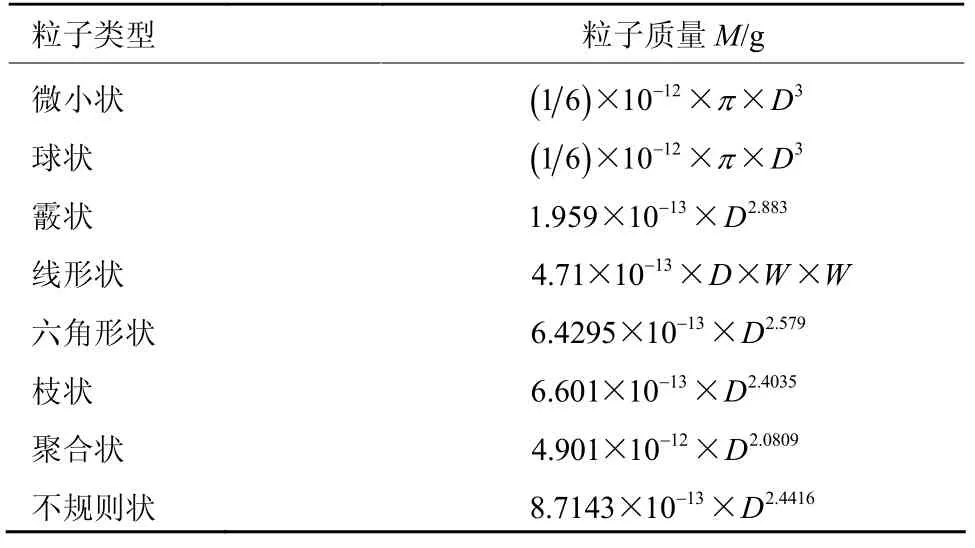
表2 8类粒子形状对应的冰水质量关系(Holroyd,1987) Table 2 Masses for particle classes(Holroyd,1987)
5 粒子浓度计算


图3 八类二维图像粒子的采样个例。八类粒子分别为微小状、线状、聚合状、霰状、球状、六角形状、不规则状和枝状 Fig.3 Examples of the habit classes: tiny,linear,aggregate,graupel,sphere,hexagonal,irregular,and dendrite
粒子浓度根据公式(5)和(6)进行计算。其中Nd为粒子浓度,Nn为根据粒子分型结果得到的粒子个数,Sam为采样面积,Dd为飞行空速,Dof为探头景深,Eaw为有效阵列宽度。OAP-2D-GA2 中62个尺度范围的采样面积、探头景深和有效阵列宽度按照仪器操作说明书中的数值进行设置。针对识别的液滴和冰晶,可分别计算出液滴浓度和冰晶浓度。如识别有抛弃粒子,可对采样体积做修正。
6 个例分析
2006年4月6日在北京地区进行了一次飞机探测,飞机于上午 09:49(北京时,下同)从北京沙河机场起飞,本场天气为小雨,10成层积云,云底高度为1500 m。探测轨迹见图4。图5给出了本次飞行的飞机高度、大气温度和FSSP计算液水含水量 LWC(Liquid Water Content)随时间的变化情况。
本文选取09:49:43~10:15:00的地面到5000 m高度的上升探测和 11:29:34~12:11:14的 4500~2700 m的下降探测两个部分分别进行分析。
6.1 爬升段特征分析
图4 2006年4月6日飞机探测轨迹 Fig.4 Airplane track on 6 April 2006
飞机起飞后迅速爬升至4500 m高度,该高度段主要穿越1200~2500 m的层积云和2500~4500 m的高层云。图6给出了温度、液水含量LWC以及冰水含量 IWC(Ice Water Content)的垂直分布 情况,由于本场云为降水性层状云,其含水量较大,云中的最大液水含量出现在3400 m处,位于云顶下方约1500 m处,冰水含量主要集中在0.01~0.04 gm-3,且其垂直分布比较均匀。图7给出了液滴浓度和冰晶浓度的垂直分布情况,降水性层状云的液滴浓度较大,而中云的冰晶浓度较大,且冰晶最大粒子浓度位于云顶附近。由于这次上升探测其在水平范围内的跨度较大,所以其水平不均一性影响了云微物理特征在垂直方向上的分布特征描述。
6.2 下降段特征分析

图5 飞机高度、大气温度和FSSP含水量随时间的变化情况 Fig.5 Airplane height,air temperature,and LWC derived from FSSP versus time

图6 爬升段温度、液水含量以及冰水含量的垂直分布情况 Fig.6 Vertical profiles of temperature,LWC,and IWC during aircraft climbing
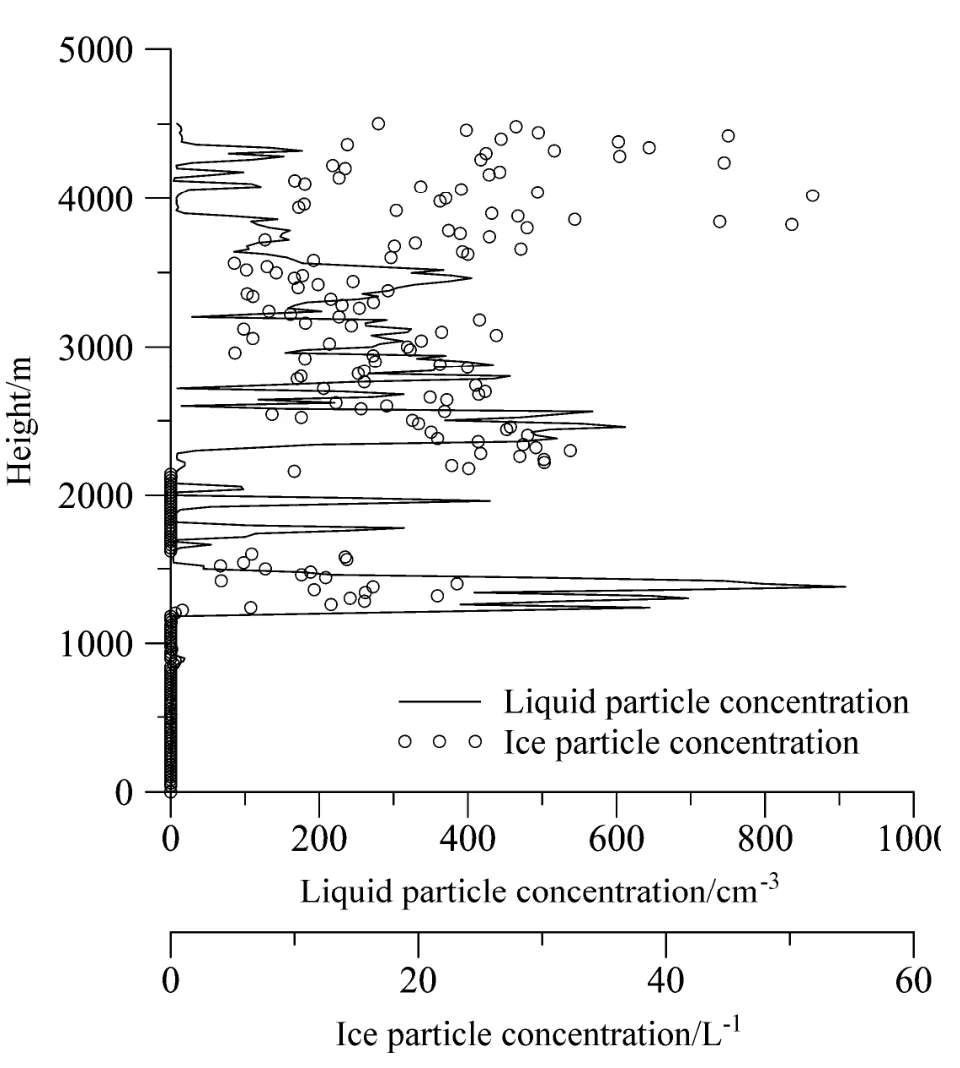
图7 爬升段液滴浓度和冰晶浓度的垂直分布情况 Fig.7 Vertical profiles of liquid and ice particles concentration during aircraft climbing
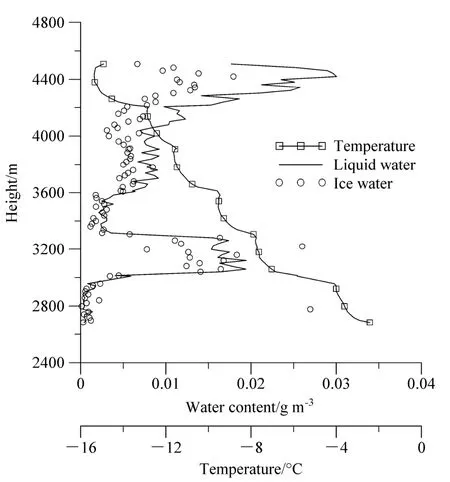
图8 下降段温度、液水含量以及冰水含量的垂直分布情况 Fig.8 Vertical profiles of temperature,LWC,and IWC duringaircraft falling
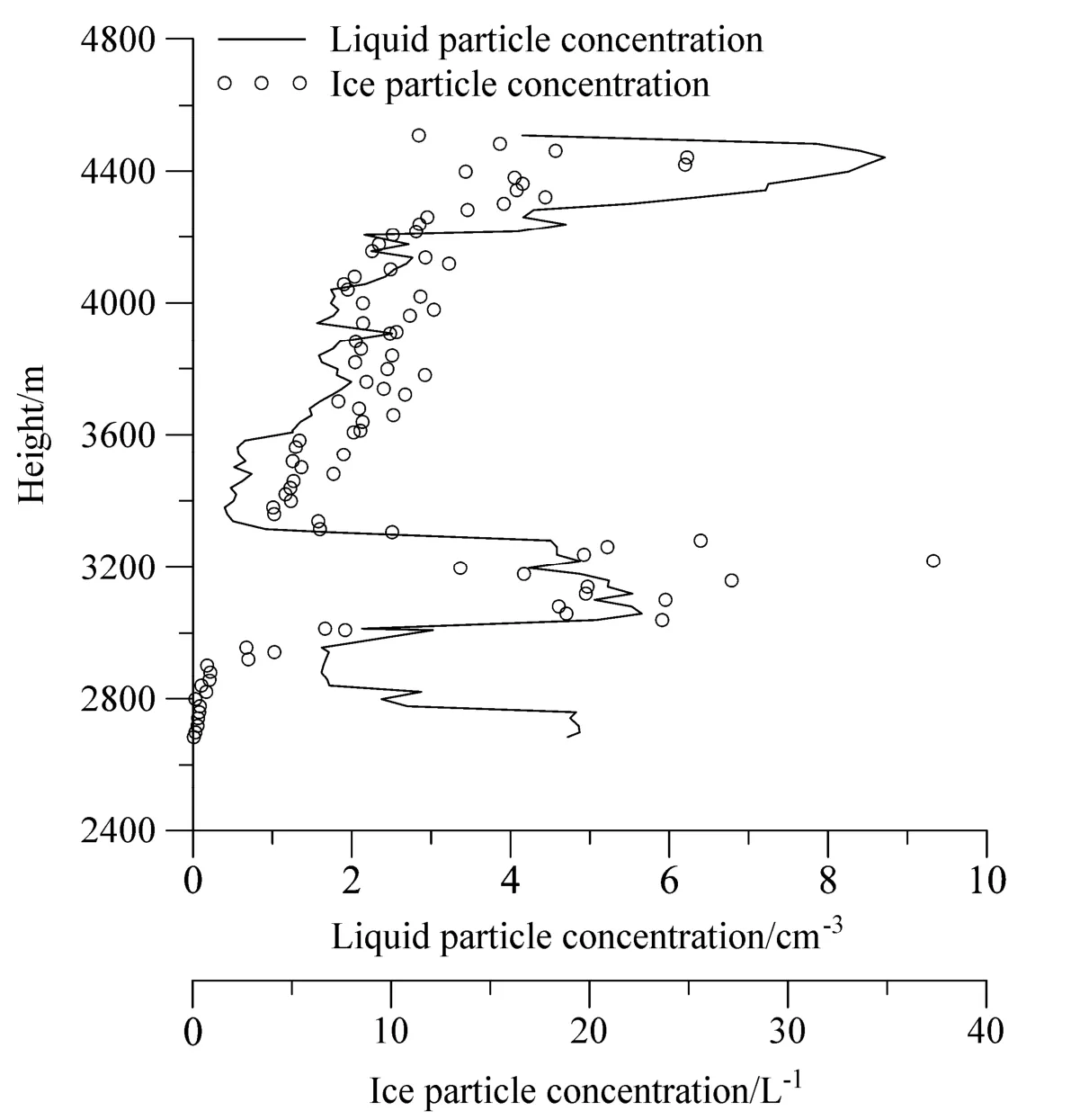
图9 下降段液滴浓度和冰晶浓度的垂直分布情况 Fig.9 Vertical profiles of liquid and ice particles concentration during aircraft falling
飞机在11:55~12:10的4500~2800 m的部分做下降探测,图8给出了温度、液水含量以及冰水含 量的垂直分布情况,该高积云的液水含量有两个极值,最大值出现在云顶位置,在3000~3300 m出现了液水含量较大值区域。冰水含量的极值出现位置与液水含量相一致,最大值出现在云底附近,同时 在 3600~4200 m 处冰水含量变化不大,保持在0.005 gm-3附近。图9给出了液滴浓度和冰晶浓度的垂直分布情况,液滴浓度在10 cm-3以下,极值位置出现在云顶和3100 m附近,冰晶浓度在10 L-1以下,极值位置同液滴浓度极值位置相同,最大值出现在3100 m附近。张佃国等(2007)在对4次北京地区飞机探测结果分析时认为 OAP-2D-GA2的浓度变化范围从 2.25 L-1到 3.29 L-1。范烨等(2010)分析了北京地区2004年8月15日的一次探测结果,与此次下降段云的温度范围近似,其OAP-2D-GA2的平均冰晶浓度为0.73 L-1。该下降段获取的冰晶浓度要大于上述两个测量结果。
根据机上人员记录显示,主要穿越了一层高积云,且在2800 m以下还存在一层层积云,那么飞机可能下降穿越了两层云几乎连接的云,其中液水含量的最大值出现在云顶处,冰水含量的最大值出现在云底附近。Fleishauer et al.(2002)认为在云顶附近出现液态水含量的最大值,在云底附近出现冰晶粒子的最大值是中层混合相单层云的特征之一,由于云顶的冰晶数量较少,导致液态水在云顶可以持续存在下去。
Fleishauer et al.(2002)对 6 个中层云的微物理结构进行了分析。得到的中层云的平均液水含量在0.01~0.15 gm-3的量级,FSSP浓度在 1.0~127.5 cm-3范围内,平均浓度为38.3 cm-3,OAP-2DC浓度在 0.1~73.9 L-1,平均浓度为 9.8 L-1。表 3为Fleishauer et al.(2002)对其他混合云探测结果的总结。本文中的下降段探测为非降水性中层云,其液水含量在 0.005~0.03 gm-3,平均值为 0.014 gm-3,FSSP浓度范围为 1.6~8.7 cm-3,平均浓度为 4.0 cm-3。冰晶浓度范围为 7~37 L-1,平均浓度为 14 L-1。本文下降段探测到的液水含量与表3的结果相比较小,FSSP 浓度比 Fleishauer et al.(2002)给出的浓度要小一个量级,与本文中上升段降水云的探测结果相比要小很多,表明降水云和非降水云之间存在的明显差异。
本文利用二维粒子图像分型技术对下降探测时二维灰度探头 OAP-2D-GA2获取的粒子图像进行了分型。这里把 0~20°C 温度范围每隔 5°C取 一个间隔,计算不同尺度的各型粒子在温度间隔内的出现频率,选取了小于 140 μm、140~495 μm、495~1005 μm、1005~1665 μm、大于 1665 μm 共5个尺度范围。表4给出了识别粒子在各尺度和各温度间隔的出现个数,下降探测共获取粒子337233个,其中抛弃粒子有 147708个,占所有识别粒子的43.8%。表5给出了识别粒子在各尺度和各温度范围的出现频率。
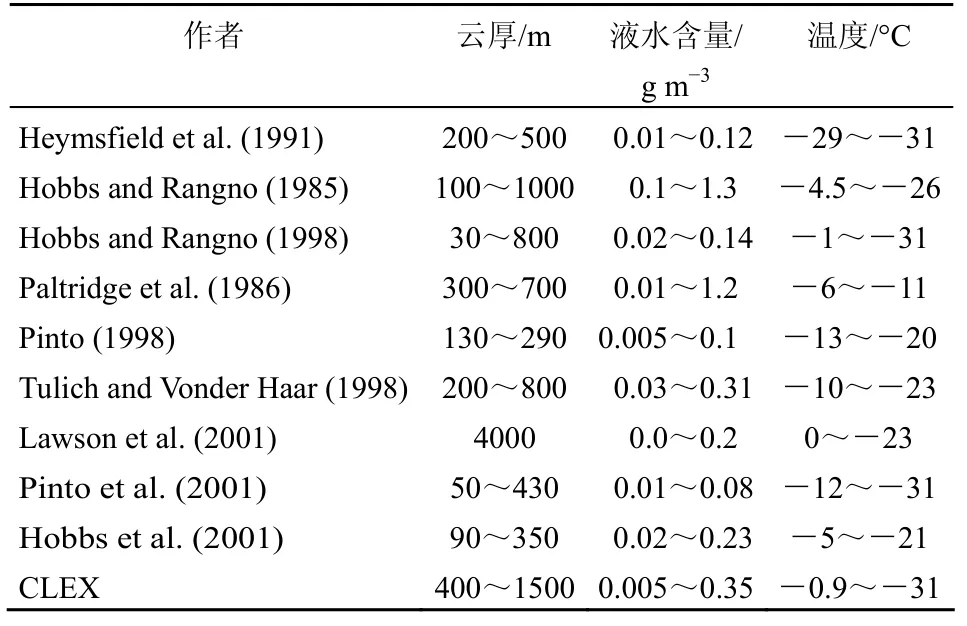
表3 其他部分混合云的探测结果[摘自 Fleishauer et al.(2002)] Table 3 Cloud depth,LWC,and temperature comparison[from Fleishauer et al.(2002)]

表4 二维粒子在各温度和尺度间隔上的出现数量 Table 4 Number of images analyzed for different temperature intervals
小于140 μm的微小状粒子在0>T>-20°C温度区间的出现频率为99.9%,几乎所有小粒子为此种形状,由于小粒子的组成光阵点较少,难以形成可供判别其他形状的几何参数;线形状粒子的最大出现频率位于0>T>-5°C温度区间的495~1665 μm,其中该温度区间内495~1005 μm的出现频率为11.6%,1005~1665 μm的出现频率为28%;聚合状粒子整体的出现频率较小,其中 1005~1665 μm的出现频率仅为1.6%,而在D>1665 μm的范围内,聚合状粒子几乎占了其中绝大多数,由于该范围的采样粒子较少,因此其统计代表意义较小;霰状粒子出现在D>495 μm的范围内,其出现频率随着温度降低而增加;球型粒子主要出现在 140<D<1005 μm的范围内,其最大出现频率位于-5>T>-10°C,高达 30.6%,球形粒子可能是液态水滴也有可能是球状冰晶;六角形状冰晶主要分布在140<D<1005 μm的范围内,且其出现频率均大于50%,是该范围内出现频率最大的冰晶形状;不规则状冰晶在1005<D<1665 μm范围的出现频率较大,其在 0>T>-20°C温度区间的平均出现频率为30.7%;枝状冰晶的出现频率整体较小,几乎很少出现,其在 1005<D<1665 μm 的出现频率仅为3.5%。
Korolev et al.(2000)利用Korolev and Sussman(2000)提出的方法对过冷层状云中OAP-2DC获取的图像粒子数据进行了分析,把粒子形状分为球状、不规则状、针状和枝状四种类型。他认为在D>125 μm的粒子中不规则状粒子占大多数(84%),不规则状粒子的出现频率随着温度的降低而增加,粒子形状的出现频率与粒子大小有关。而本文中将粒子形状分为八种类型,其中的聚合状、霰状、六角形状、不规则状可近似与 Korolev et al.(2000)提出的不规则状相对应,本文中D>140 μm的这四种类型出现频率的总和为78%,略小于84%。其中霰状粒子的出现频率表现出随着温度的降低而增加,与 Korolev et al.(2000)给出的不规则状粒子的频率表现一致。
7 结论
对于飞机粒子云探测系统,二维粒子形状分类技术是利用二维图像探头分析云微物理结构的关键技术,只有突破该技术,才能得到较为可信的粒子分类、含水量和粒子浓度结果。此外,由于不同的二维图像探头所包含的光阵元件和光阵元件数量的不同,导致图像分辨率和测量范围的不同,所以每类二维图像探头对应的二维粒子形状分类方法不尽相同,在分型时不能简单的套用一种分型方法。本文针对粒子探测系统,首先给出了二维图像探头的粒子分型技术,结合冰—水质量关系,给出了含水量、粒子浓度的计算方法。最后,初步分析了 2006年一次飞机探测过程中的云微物理特征。主要结论如下:

表5 二维粒子在各尺度和各温度范围的出现频率 Table 5 The frequency of occurrence of particle habits
(1)二维粒子形状分类技术在 2006年一次飞机探测过程中的应用结果与 Korolev et al.(2000)给出的结果相比,本文中的聚合状、霰状、六角形状、不规则状表现出与对应的 Korolev et al.(2000)的不规则状相近的出现频率,其中霰状粒子的出现频率表现出随着温度的降低而增加的趋势。
(2)在 2006年飞机探测过程中,非降水云中的液水含量、液滴粒子浓度、冰晶浓度小于降水云的对应值,其中液水含量、液滴粒子浓度有量级上的差别,而冰晶粒子浓度差别不大。
(3)在 2006年飞机探测过程中,非降水云中液水含量的平均值为0.01 g m-3,冰水含量的平均值 0.007 g m-3,冰晶粒子浓度的平均值为 11.9 L-1。其中液水含量与Fleishauer(2002)给出的一些结果相比明显较小。
当云中有冰晶存在,特别是在卷云环境中,大冰晶粒子与探头外部结构撞击后可破碎为多个小冰晶粒子,这些小冰晶粒子会通过探头采样区域从而造成测量结果中小粒子的成倍增加。最近,有许多证据显示这些小冰晶粒子是由于仪器结构不合理造成的,而非自然形成。Korolev et al.(2011)通过对飞机积冰仪器评估外场观测试验结果的分析,初步阐述了冰晶粒子破碎对测量结果的影响。Korolev et al.(2013)总结了破碎粒子影响的分析结论,定量给出了破碎冰晶粒子对最终测量值的影响,建议FSSP的探测结果不要用于冰晶云的分析。其结果进一步表明 2D探头的粒子谱分布中对粒子浓度有过大的估计,且随着粒子尺度的减小这种过大估计越明显。本文的分形算法中,在对抛弃粒子进行识别时,通过对不连续的粒子图像识别可以部分剔除破碎粒子,然而并不能完全消除这样的影响。对破碎粒子的识别和过滤是今后我们工作中需要进一步解决的问题。
(
)
Duroure C,Larsen H R,Isaka H,et al.1994.2D image population analysis[J].Atmos.Res.,34(1-4): 195-205.
范烨,郭学良,张佃国,等.2010.北京及周边地区 2004 年 8、9 月层积云结构及谱分析飞机探测研究[J].大气科学,34(6): 1187-1200.Fan Ye,Guo Xueliang,Zhang Dianguo,et al.2010.Airborne particle measuring system measurement on structure and size distribution of stratocumulus during August to September in 2004 over Beijing and its surrounding areas[J].Chinese Journal of Atmospheric Sciences(in Chinese),34(6): 1187-1200.
Fleishauer R P,Larson V E,Vonder Haar T H.2002.Observed microphysical structure of midlevel,mixed-phase clouds[J].J.Atmos.Sci.,59(11): 1779-1804.
Garbrick D,Chandrasekar V,Xiao R.1995.Neural network based classification procedure for 2D-PMS ice crystal images[C]// Conference on Cloud Physics.Boston,USA: American Meteorological Society,59-64.
Gayet J F,Febver G,Larsen H.1996.The reliability of the PMS FSSP in the presence of small ice crystals[J].J.Atmos.Oceanic Technol.,13(6): 1300-1310.
郭金平.1996.冰雪晶二维图像及霰粒子谱特征分析[J].气象,22(4): 41-45.Guo Jinping.1996.The analysis of two-dimensional image of ice crystal and the size distribution of graupel particles[J].Meteorological Monthly(in Chinese),22(4): 41-45.
郭学良,郑国光.2010.大气物理与人工影响天气[M].北京: 气象出版社,526-527.Guo Xueliang,Zheng Guoguang.2010.Atmospheric Physics and Weather Modificaiton(in Chinese)[M].Beijing: China Meteorological Press,526-527.
Heymsfield A J,Parrish J L.1979.Techniques employed in the processing of particle size spectra and state parameter data obtained with the T-28 aircraft platform[R].NCAR Technical Note: NCAR/TN-137+1A.
Heymsfield A J,Miloshevich L M,Slingo A,et al.1991.An observational and theoretical study of highly supercooled altocumulus[J].J.Atmos.Sci.,48(7): 923-945.
Hobbs P V,Rangno A L.1985.Ice particle concentrations in clouds[J].J.Atmos.Sci.,42(23): 2523-2549.
Hobbs P V,Rangno A L.1998.Microstructures of low and middle-level clouds over the Beaufort Sea[J].Quart.J.Roy.Meteor.Soc.,124(550): 2035-2071.
Hobbs P V,Rangno A L,Shupe M,et al.2001.Airborne studies of cloud structures over the Arctic Ocean and comparisons with retrievals from ship-based remote sensing measurements[J].J.Geophys.Res.,106(D14): 15029-15015.
Holroyd E W III.1987.Some techniques and uses of 2D-C habit classification software for snow particles[J].J.Atmos.Oceanic Technol.,4(3): 498-511.
Hunter H E,Dyer R M,Glass M.1984.A two-dimensional hydrometeor machine classifier derived from observed data[J].J.Atmos.Oceanic Technol.,1(1): 28-36.
Korolev A,Sussman B.2000.A technique for habit classification of cloud particles[J].J.Atmos.Oceanic Technol.,17(8): 1048-1057.
Korolev A,Isaac G A,Hallett J.2000.Ice particle habits in stratiform clouds[J].Quart.J.Roy.Meteor.Soc.,126(569): 2873-2902.
Korolev A,Emery E F,Strapp J,et al.2011.Small ice particles in tropospheric clouds: Fact or artifact? Airborne Icing Instrumentation Evaluation Experiment[J].Bull.Amer.Meteor.Soc.,92: 967-973.
Korolev A,Emery E F,Strapp J,et al.2013.Quantification of the effects of shattering on airborne ice particle measurements[J].J.Atmos.Oceanic Technol.,doi:10.1175/JTECH-D-13-00115.1,in press.
Lawson R P,Baker B A,Schmitt C G,et al.2001.An overview of microphysical properties of Arctic clouds observed in May and July 1998 during FIRE ACE[J].J.Geophys.Res.,106(D14): 14989-14915.
廖国男.2004.大气辐射导论(第二版)[M].北京: 气象出版社,221pp.Liao G N.2004.An Introduction to Atmospheric Radiation(Second Edition)(in Chinese)[M].Beijing: China Meteorological Press,221pp.
刘卫国,苏正军,王广河,等.2003.新一代机载 PMS 粒子测量系统及应用[J].应用气象学报,14(S1): 11-18.Liu Weiguo,Su Zhengjun,Wang Guanghe,et al.2003.The new generation of airborne PMS particle measurement system and applications[J].J.Appl.Meteor.Sci.(in Chinese),14(S1): 11-18.
Lohmeier S P,Sekelsky S M,Firda J M,et al.1997.Classification of particles in stratiform clouds using the 33 and 95 GHz polarimetric cloud profiling radar system(CPRS)[J].IEEE Trans.Geosci.Remote Sens.,35(2): 256-270.
Magono C,Lee C W.1966.Meteorological classification of natural snow crystals[J].J.Fac.Sci.Hokkaido Univ.Ser.,7,Geophysics,2(4): 321-335.
Moss S J,Johnson D W.1994.Aircraft measurements to validate and improve numerical model parameterizations of ice to water ratios in clouds[J].Atmos.Res.,34(1): 1-25.
Nakaya U.1954.Snow Crystal: Natural and Artificial[M].Cambridge: Harvard University Press,510pp.
Paltridge G,King W,Platt C.1986.A case study of ice particle growth in a mixed-phase altostratus cloud[J].Aust.Meteor.Mag.,34(4): 149-154.
Pinto J O.1998.Autumnal mixed-phase cloudy boundary layers in the Arctic[J].J.Atmos.Sci.,55(11): 2016-2038.
Pinto J O,Curry J A,Intrieri J M.2001.Cloud-aerosol interactions during autumn over Beaufort Sea[J].J.Geophys.Res.,106(D14): 15077-15015.
齐彦斌,郭学良,金德镇.2007.一次东北冷涡中对流云带的宏微物理结构探测研究[J].大气科学,31(4): 621-634.Qi Yanbin,Guo Xueliang,Jin Dezhen.2007.An observational study of macro/microphysical structures of convective rainbands of a cold vortex over Northeast China[J].Chinese J.Atmos.Sci.(in Chinese),31(4): 621-634.
Rahman M M,Quincy E A,Jacquot R G,et al.1981.Feature extraction and selection for pattern recognition of two-dimensional hydrometeor images[J].J.Appl.Meteor.,20(5): 521-535.
Ramanathan V,Cess R D,Harrison E F,et al.1988.Cloud-radiative forcing and climate: Results from the earth radiation budget experiment[J].Science,243(4887): 57-63.
Rottner D,Vali G.1974.Snow crystal habit at small excesses of vapor density over ice saturation[J].J.Atmos.Sci.,31(2): 560-569.
Schols J L,Weinman J A,Alexander G D,et al.1999.Microwave properties of frozen precipitation around a North Atlantic cyclone[J].J.Appl.Meteor.,38(1): 29-43.
Shupe M D,Daniel J S,De Boer G,et al.2008.A focus on mixed-phase clouds: The status of ground-based observational methods[J].Bull.Amer.Meteor.Soc.,89(10): 1549-1562.
Strapp J W,Albers F,Reuter A,et al.2001.Laboratory measurements of the response of a PMS OAP-2DC[J].J.Atmos.Oceanic Technol.,18(7): 1150-1170.
Tulich S N,Haar T H V.1998.Measured and calculated structures of a multi-layer altocumulus cloud[R].Colorado State University Atmos.Sci.
游来光.1987.我国云物理和人工影响天气研究工作新进展[J].气象科技,21(1): 59-64.You Laiguang.1987.The new progress of cloud physics and weather modification research in China[J].Meteorological Science and Technology(in Chinese),21(1): 59-64.
Young S A,Platt C M R,Austin G R,et al.2000.Optical properties and phase of some midlatitude,midlevel clouds in ECLIPS[J].J.Appl.Meteor.,39(2): 135-153.
Zamorsky A D.1955.Ice in the Atmosphere[M].Moscow: Akademia Nauk SSSR,277pp.
张佃国,郭学良,付丹红,等.2007.2003年 8~9 月北京及周边地区云系微物理飞机探测研究[J].大气科学,31(4): 596-610.Zhang Dianguo,Guo Xueliang,Fu Danhong,et al.2007.Aircraft observation on cloud microphysics in Beijing and its surrounding regions during August-September 2003[J].Chinese Journal of Atmospheric Sciences(in Chinese),31(4): 596-610.
赵增亮.2010.层状云的微物理结构探测研究[D].北京大学博士学位论文.Zhao Zengliang.2010.Research on microphysical structure of stratiform clouds[D].Ph.D.dissertation(in Chinese),Peking University.
猜你喜欢
航空学报(2023年1期)2023-01-31
中学生天地(A版)(2022年11期)2022-11-25
现代电子技术(2021年1期)2021-01-17
新世纪智能(英语备考)(2018年11期)2018-12-29
上海大学学报(自然科学版)(2018年5期)2018-11-02
现代营销(创富信息版)(2018年6期)2018-09-05
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
小天使·五年级语数英综合(2016年12期)2016-12-09
琴童(2016年5期)2016-05-14
