室内定位技术及应用综述
2014-12-18 11:39朱祖礼姚金飞
电子科技 2014年3期
赵 锐,钟 榜,朱祖礼,马 乐,姚金飞
(1.军事交通学院基础部,天津 300161;2.军事交通学院研究生管理大队,天津 300161)
自从以GPS为代表的定位技术出现以来,其高效、方便、快速与准确使人们的生活出现了巨大的变化,带动了一批应用和服务的快速发展,但传统定位技术由于技术原理的局限性,在室内环境的定位效果不尽理想,因此目前室内环境急需一种高效、便捷、准确的定位技术来填补空白。当前的定位技术主要依托临近信息、场景分析和几何定位3种算法展开,借助多个辅助节点,利用不同的介质手段完成测距,然后和信息数据库中数据匹配完成定位。
1 应用前景
定位技术的影响延伸到了包括军事、科技、以及人们普通生活在内的各个领域,而室内定位技术作为定位技术在室内环境的延续,弥补了传统定位技术的不足,有着良好的应用前景。
1.1 基于位置服务的发展方向
伴随社交网络而出现的LBS(Location Based Service)能够根据人们日常的生活规律打造个性化的生活方式。而室内定位技术的发展,能进一步完善基于位置服务,能帮助人们完成各种繁杂、耗时的任务。这些解决方案和应用将是基于位置服务行业未来的发展方向,并将统领整个市场。
1.2 促进电子商务
目前的定位技术可以帮助人们在城市中定位一家商店,而室内定位技术的发展,能够帮助人们在商场中快速定位一家小的店铺,甚至可以在大型超市中快速定位商品,省去了人们在寻找上浪费的时间。
1.3 应急救援的开展
当发生地震、火灾等紧急事件时,救援的关键就是快速确定人员位置。特别是当建筑物由于火灾、地震的影响,与原布局相比发生较大变化的时候,凭借经验很难快速定位人员位置,而且盲目寻找很危险。此时,室内定位技术为救援提供了强有力的技术支持,不仅节约时间,还可以为救援规划安全救援路线。
1.4 公共安全事件
当发生人质劫持、炸弹威胁等公共安全事件时,了解建筑物内的情况,快速定位人员的分布,能够为事件的快速解决提供很大的帮助。同时在反恐部队进入建筑物执行任务时,室内定位技术能帮助其确定自己和同伴位置,有利于进行战术协同和配合,提高执行任务的效率和安全性。
2 室内定位的难点
相对于传统的室外定位技术,室内定位技术由于其环境的特殊性,存在以下技术难点。(1)GPS信号变弱。室内环境由于墙体的遮蔽,尤其是钢筋混凝土时,GPS信号穿过建筑物后会明显变弱,传统依靠GPS进行定位的技术,精确度大幅降低。所以室内环境不适宜使用GPS技术进行定位。(2)障碍物多。建筑物内通常会有各种障碍物,包括家具、房间和行人等。障碍物位置各异,房间布局不同,行人时刻在动,大量的不确定性使室内环境异常复杂。(3)干扰源多。由于室内环境相对封闭,声音、光线、温度等干扰源都会对定位设备的传感器造成一定的影响,特别是声音和光线,会在室内进行多次反射,使室内干扰情况更加复杂。(4)多层建筑中的定位。室内定位不仅要考虑二维平面的位置,在多层建筑中还要考虑楼层的位置,包括地上和地下部分。(5)未知环境定位困难。目前大部分室内定位技术都是基于对室内环境了解的基础上,但实际应用中也许得不到环境信息,或者定位基础设施遭到破坏,比如地震、反恐等特殊情况时,减少对环境依赖性的室内定位也是一项难题。
3 定位算法
目前的定位算法,从原理上来说,大体上可以分为3种:邻近信息法、场景分析法以及几何特征法。
3.1 邻近信息法
利用信号作用的有限范围,可以确定待测点是否在某个参考点的附近。但只能提供大概的定位信息,能满足某些应用的要求[1-3]。例如利用手机基站定位,可以确定来电归属地,但精度也只能确定在某一地区。
3.2 场景分析法
对于指定位置的可测量特征定位。比如测量接收信号的强度,与实现测量的、存在数据库的该位置的信号强度作对比[1-3]。理想的场景分析法可以利用视频识别,看到某一景物就能确定位置,但这需要庞大的信息知识库做支撑。
3.3 几何特征法
几何特征法是利用几何原理进行定位的算法,是目前应用最广泛的定位算法,通常需要多个点和边作为已知条件进行计算定位,具体又分为以下几种[1-3]:(1)三边定位法:在平面上,三边定位法就是测量待测点到3个不在同一直线上的参考点的距离。根据估计的三边距离,再结合参考点的位置,待测点的位置就在3个圆的交点上。(2)三角定位法:利用了这样一个事实:在一个三角形中,如果已知一条边的长度和两个角的大小,那么可以确定第3个点的位置,且该点是三角形另外两条边的交点。(3)双曲线定位法:形成双曲线的几何原理是:到两个固定点距离差为常数的动点轨迹,是以这两个固定点为焦点的双曲线。由3个不在一条直线上的参考点可以确定两条双曲线,两条双曲线的交点就是待测点。
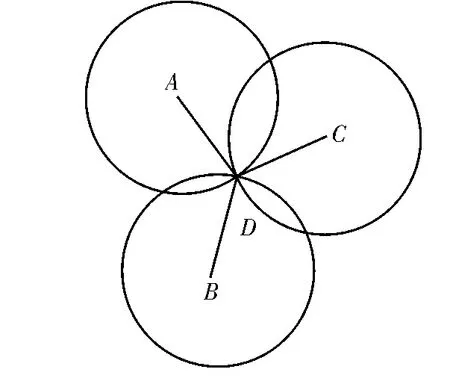
图1 三边定位

图2 三角定位
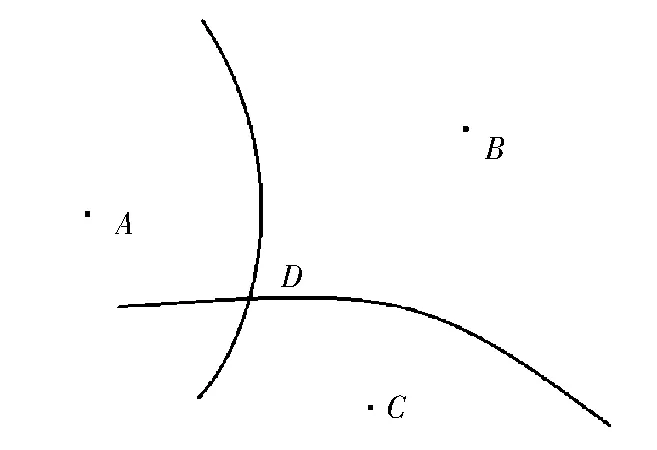
图3 双曲线定位
4 定位技术
根据上面介绍的定位算法,衍生出了多种室内定位技术,其中包括GPS、红外线、超声波、蓝牙、射频识别、超宽带、ZigBee 和 WiFi。
4.1 结构原理
目前的定位技术多要借助辅助节点进行定位,通过不同的测距方式,计算出待测节点相对于辅助节点的位置,然后与数据库中事先收集的数据进行比对,从而确定当前位置,如图4所示。
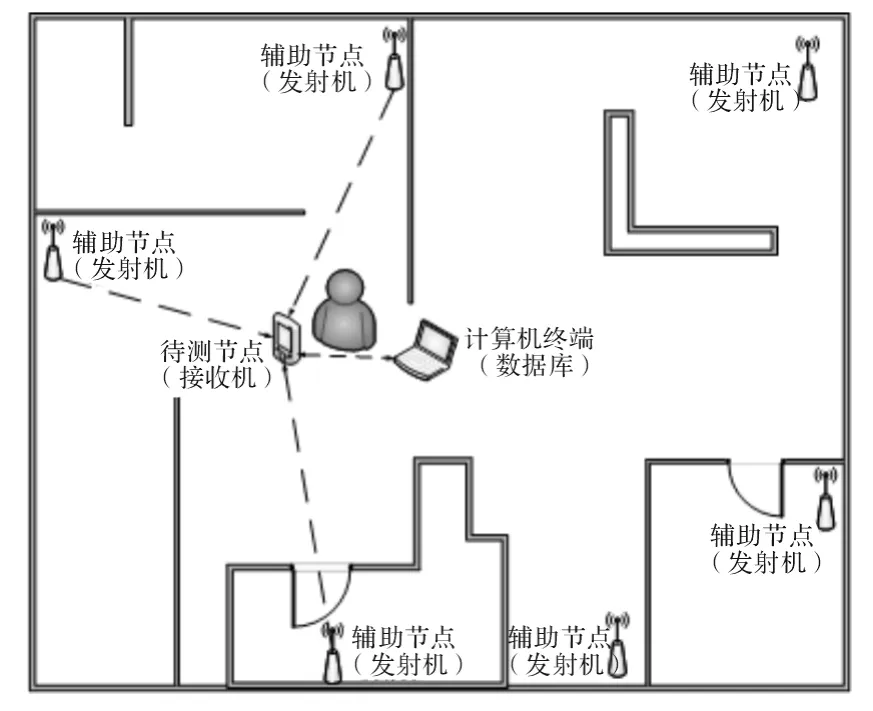
图4 室内定位结构原理图
首先在室内环境设置固定位置的辅助节点,这些节点的位置已知,有的位置信息是直接存在节点中,如RFID的标签,有的是存在电脑终端的数据库中,如红外线、超声波等。
然后测量待测节点到辅助节点的距离,从而确定相对位置。使用某种方式进行测距通常需要一对发射和接收设备,按照发射机和接收机的位置大体可以分为两种:发射机位于被测节点,接收机位于辅助节点,例如红外线,超声波和RFID;另一种是发射机位于辅助节点,接收机位于被测节点,例如 WiFi、超宽带、ZigBee和蓝牙。
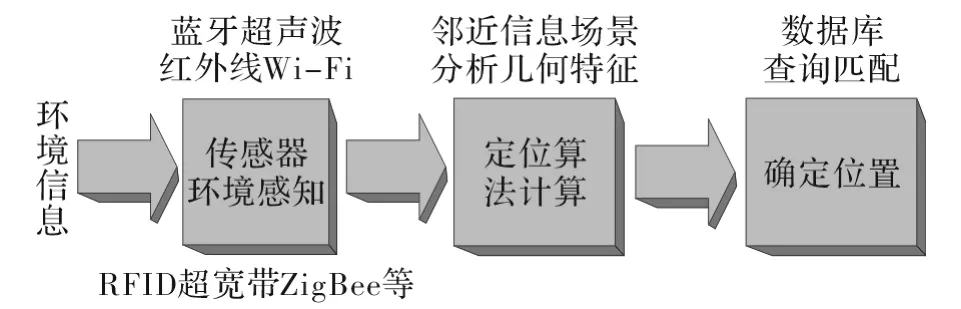
图5 室内定位流程
最后分析计算位置,利用计算机终端的数据库进行匹配,从而得出具体位置。具体流程如图5所示,除了用到之前已知的辅助节点位置和计算得出的距离外,还需要一定的模型来提高精度。
4.2 模型分析
随着人们对定位精度要求的不断提高,测距后利用几何定位已不能满足要求,因此目前的室内定位方法都使用计算模型,具有更高精度和可靠性。目前比较成熟的模型包括传播模型和指纹模型,这两种模型在WiFi定位技术上应用广泛。
(1)传播模型。依靠分析信号传播过程中的特性来推算传播距离。常用的特性包括:RSSI(Received Signal Strength Indication),AOA(Angel of Arrival),TOA(Time of Arrival)。由于所有参数难以在同一模型内考虑,所以精度有限。传播模型得益于已知无线电信号的传播和AP接入点的位置。但不能很好地处理信号的不确定性。RSSI的数值不是常数,即使发送和接收双方都不移动,也可能出现严重的振荡。这是由信道的快速衰落和无线信号传输环境的迅速变化造成的。另外,一般使用的简单的、便宜的无线信号收发器通常没有经过校准,在不同的设备上即使相同的信号强度也可能导致不同的RSSI值。
(2)指纹模型。是一种基于学习的模型,运用模式匹配的技术,根据所在位置的测量值跟已经观测到的所有位置的测量值作比较,然后根据匹配情况确定位置。可以将信号的不确定性考虑在内,在定位效果方面令人满意。主要缺点是需要大量的工作量去给一个给定的环境建立定位模型并进行校准。而且环境改变之后,之前建立的模型将不再适用,需要修改。
WiFi室内定位技术需要多个WiFi接入点。第一步是构建指纹地图,按照<指纹,地点>的形式在不同位置收集数据,并写入指纹地图的数据库。其中指纹可以包括信号强度、方向以及接入点的MAC地址等信息。第二步是定位,被测物体上安装WiFi信号接收器,在某一位置接收到信号之后,用当前位置的指纹信息到指纹地图库中匹配,即可得出所在位置。
4.3 技术对比
在精度、定位方法、实例和优缺点等方面对当前比较成熟的几种室内定位技术进行对比[4-9],从宏观上掌握室内定位技术领域发展的方向和目前研究的瓶颈问题。
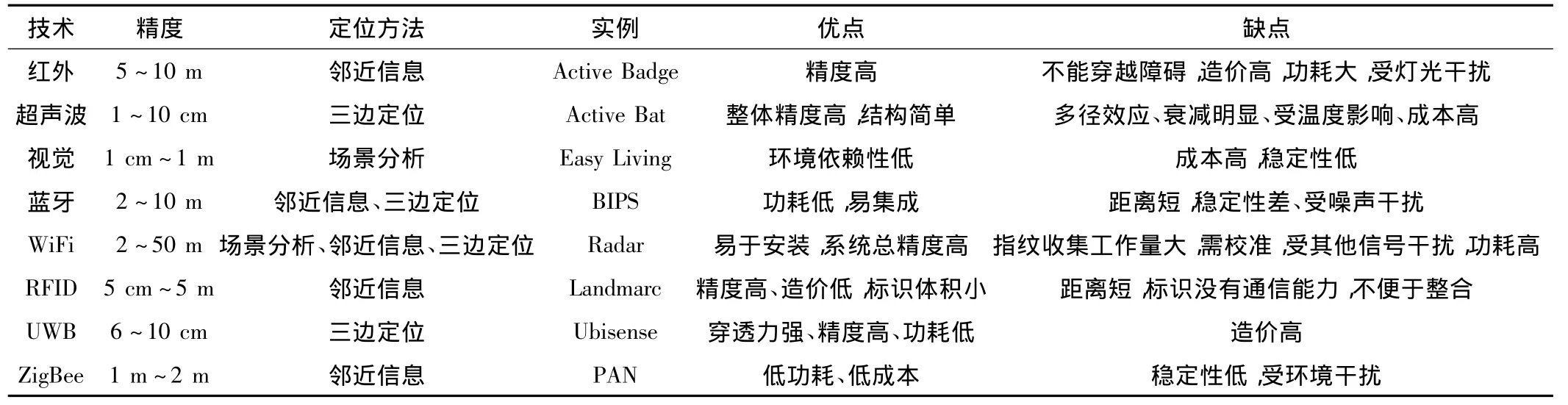
表1 主流室内定位技术对比
通过表1的对比可以看出,目前的室内定位技术发展主要存在以下几个共性问题需要解决:
(1)精度问题。目前大部分定位技术的精度还不高,约在几米之内,这个精度在室内环境来说较大,要提高精度就必须提高抗干扰能力、解决信号衰减、多径效应、视距传播和信号震荡校准等传统问题。
(2)降低能耗和成本问题。目前大部分的定位技术都需要在环境中安装辅助节点用于测距、返回位置信息等,要提高精度,就必须安装大量的辅助节点,这大幅增加了成本和能耗。有些技术本身功率大,能耗高,有的技术需要大量的人力物力去收集指纹信息,完善指纹地图,此外利用RSSI测距还需要周期性的人为校准等,这些都在实用性方面大幅制约了技术的发展。文献[10~11]通过构建指纹地图来提高WiFi定位的精度,其中文献[11]利用移动设备使用位置的历史来完善指纹地图,降低了人工搜集指纹的工作量。文献[12]利用多层建筑中各楼层结构的相似性,提出了一种算法来减轻收集指纹的工作量。文献[13]提供了一种基于FM调频的自校准机制,克服了RSSI测距时电磁波震荡产生的误差。
(3)通用标准化问题。各种定位技术都有优缺点,未来室内定位的发展趋势必然是多种技术的融合,取长补短。而体系结构的标准化问题、各种技术的无缝整合问题都大大制约了这样的发展趋势。此外,室内定位和室外定位的结合也是大势所趋,同样需要涉及到标准化问题。所以通用标准化的完善有助于促进室内定位技术的发展。目前的定位技术还没有一个统一的权威标准出台,无疑限制了多技术融合的发展。
(4)未知环境的定位问题。目前的大多数定位技术都是基于熟悉环境的,环境中预先安装了大量传感器、标签等辅助基础设施,但是实际应用场景并不都是熟悉环境,比如地震、火灾、反恐等紧急事件的处理问题,往往没有条件安装辅助基础设施。所以基于未知环境的室内定位技术有着巨大的应用需求。文献[14]提出了一种基于未知环境的定位技术,利用房间外不同位置的定向天线进行定位,取得了一定突破。此外处理如上提出的紧急事件时,还要求定位系统部署简单,反应快,精度高。
(5)安全隐私问题。个人的实时位置属于个人隐私的一部分,涉及到安全问题,目前的定位技术都会将被测物体的位置信息返回到主机进行计算或者到数据库中进行匹配,但主机或数据库会留底,这样就留下了一定的安全隐患。文献[15]提出的基于RFID的室内指导和监控系统目的在于保护使用者隐私,不打扰使用者日常生活。
5 结束语
室内定位技术是当前热门研究领域,有着广泛的应用前景,下一步的研究工作可以从以下几个方面进行:(1)提出新的定位方法。当前的定位技术都是建立在邻近信息、场景分析和几何特征三种定位方法之上的,假如可以提出新的定位方法,那必然是一篇全新的领域,对室内定位技术起到巨大的推动作用。(2)使用新的无线介质。目前的定位技术都是建立在传统无线介质之上的,各有优缺点。假如能提出一种新的无线介质,可以克服之前的缺点,则会大幅促进室内定位技术的发展。目前除了介绍的几种技术之外,还有FM、雷达、GSM等,文献[7]则使用了DECT电话网络定位,此外,磁场、视觉定位技术也处于研究阶段。(3)多技术融合。鉴于目前的主流技术各有优缺点,各技术的融合将是取长补短的有力方法。但面临的问题有通用标准化的问题,各技术无缝连接的问题,以及技术融合后的功耗问题等。(4)现有技术优化。主要是针对目前技术存在的缺点进行优化。从之前的对比可以看出,目前技术的主要缺点集中在精度低、作用距离短、易受干扰、功耗大、依赖辅助设施、造价高等方面,针对某一技术的某一缺点进行优化改进,将大幅提高该技术的实用性。
[1]朱敏.室内定位技术分析[J].现代计算机,2008(2):79-81.
[2]王琦.基于 RSSI测距的室内定位技术[J].电子科技,2012,25(6):64 -66,78.
[3]汪苑,林锦国.几种常用室内定位技术的探讨[J].中国仪器仪表,2011,23(2):54 -57.
[4]MATTHIASK,CARL F,ALBRECHT S.A comparative study of DECT and WLAN signals for indoor localization [J].IEEE Per Communication,2010,11(2):235 -243.
[5]谷红亮,史元春,申瑞民,等.一种用于智能空间的多目标跟踪室内定位系统[J].计算机学报,2007,30(9):1603 -1611.
[6]赵军,李鸿斌,王智.无线网络室内定位系统研究[J].信息与控制,2008,37(4):465 -471.
[7]张明华,张申生,曹健.无线局域网中基于信号强度的室内定位[J].计算机科学,2007,34(6):68 -71,75.
[8]陈聪传,程良伦.区域细化的RFID室内定位算法[J].计算机应用与软件,2011,28(1):50 -52.
[9]张浩,赵千川.蓝牙手机室内定位系统[J].计算机应用,2011,31(11):3152 -3156.
[10]HAN Dongsoo,LEE Minkyu,CHANG Laeyoung,et al.Open radio map based indoor navigation system [J].IEEE Per Communication,2010,11(2):844 -849.
[11]SHINICHIM,SAEF H,YAMAGU C,et al.Local map generation using position and communication history of mobile nodes[J].IEEE Per Communication,2010,11(2):722 -729.
[12]WANG Huayan,ZHENG V W,ZHAO Junhui,et al.Indoor localization in multi-floor environments with reduced effort[J].IEEE Per Communication,2010,11(2):222 -228.
[13]ALEKSANDAR M,ANDREI P,VENET O,et al.Tuning to your position:FM radio based indoor localization with spontaneous recalibration[J].IEEE Per Communication,2010,11(2):153-161.
[14]THADPONGP,SHAMEEM A,et al.Zero - knowledge realtime indoor tracking via outdoor wireless directional antennas[J].IEEE Per Communication,2010,11(2):852 -858.
[15]NOVA A,STEWART B,UMAKISHORE R.GuardianAngel:an RFID-based indoor guidance and monitoring system[J].IEEE Per Communication,2010,11(2):546 -551.
猜你喜欢
河北画报(2021年2期)2021-05-25
小哥白尼(趣味科学)(2021年11期)2021-02-28
小天使·一年级语数英综合(2020年10期)2020-12-16
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
知识经济·中国直销(2018年3期)2018-04-12
现代园艺(2018年2期)2018-03-15
现代园艺(2017年21期)2018-01-03
自动化学报(2016年8期)2016-04-16
智能系统学报(2015年4期)2015-12-27