基于Fuzzy-PID的恒流放电控制器设计与仿真
2015-01-04 06:24赵强,鲁芳
船电技术 2015年11期
赵 强,鲁 芳
(海军航空工程学院控制工程系,山东烟台 264001)
0 引言
在蓄电池使用和维护过程中,根据实际的需要,要定期对蓄电池进行恒流放电,本文利用PTC的电流随温度变化的关系,通过控制风扇的排风量,进而达到控制PTC的温度的目的,由于PTC温度的控制面临的是一个时变、复杂的被控对象。因此,我们提出了模糊PID控制器来实现对被控对象的控制。所谓的模糊PID控制就是模糊控制与PID控制相结合,共同对被控对象进行控制的活动,它可以不需要知道被控对象精确的数学模型就可实现对其控制[1]。通过仿真结果可以看出,本文设计的控制器可以达到较好的控制效果。
1 模糊PID控制器设计
模糊控制与PID控制的结合方式主要有以下
如图1所示原理图,本文设计的模糊PID控制器为双输入三输出的控制器,即输入信号为误差e=y(t)-r(t)与误差变化率ec=e(k)-e(k-1),输出信号为ΔKp、ΔKi、ΔKd,其中r(t)为目标温度,y(t)为实际温度,输出信号为PID参数的调整量。模糊PID控制的工作原理:将e与ec的精确量模糊化后输入模糊控制器中,利用如图1所示的控制过程来得到ΔKp、ΔKi、ΔKd的值,然后利用几种[2]:
1)根据误差的大小Fuzzy控制与PID控制相互转化使用。
2)PID控制与Fuzzy控制组成的混合型模糊PID控制。
3)利用 Fuzzy控制器在线整定 PID控制参数。
由于第三种控制方法更加良好,本文选用第三种方法。其控制原理图如图1所示。
1.1 PTC温度模糊PID控制器结构
公式(1)得到Kp、Ki、Kd的值,最后根据PID控制算法得到控制量u,实现对PTC温度的实时控制。公式(1)为:


图1 模糊PID控制系统原理
1.2 模糊化处理
设输入输出的论域均为[-5 5],取输入输出语言变量的模糊子集为{NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大},模糊子集的隶属函数均采用三角形分布[3]。它们的隶属函数曲线如图2所示。其函数表达式如式(2)-式(8)所示。

1.3 模糊推理决策
偏差e和偏差变化率ec不同时,PID的增益Kp,Ki,Kd应遵循如下整定规律[4]:1)偏差∣e∣较大时,应取一个大的Kp,一个较小的Kd值,通常取Ki=0。2)偏差∣e∣和∣ec∣中等大小时,应取较小的Kp和适当的Kd,Ki。3)偏差∣e∣较小时,应取较大的Kp和Ki,适当的Kd。

根据以上原则,采用“if-then”条件语句,即:

其中,i=1,2,…,7;j=1,2,3;Aj、Bj、Cj、Dj和 Fj分别为e(k)、ec(k)、ΔKp、ΔKi和ΔKd对应的语言变量值。这样,得到的模糊控制规则表见表1~表3所示。
1.4 去模糊化处理
通过模糊控制器得到的结果为模糊量,但是在实际的控制系统中,需要一个确定的值来对被控对象进行控制。因此,模糊量必须经过一个精确化的处理过程,才能实现对被控对象的控制,我们称之去模糊化处理。
去模糊的方法有很多,常用的有MIN-MAX-重心法、代数积-加法-重心法、函数型推理法、选择最大隶属度法、取中心数法等等。其中,选择最大隶属度方法的算法实时性好,简单易行,因此,本文选用此方法。

表1 Dkp的模糊控制规则

表2 Dki的模糊控制规则

表3 DKd的模糊控制规则
选取控制量为模糊子集中隶属度最大的元素就是我们说的选择最大隶属度方法,例如模糊子集为C,隶属最大的元素u*应满足式(9):

若u*只有一个,则控制量就是其的值。若u*有多个,且≤≤…≤,则取控制量为[,]的中点。
2 被控对象模型建立
简单来说,被控对象为风扇控温系统,其控制的为PTC热敏电阻的表面温度,由于PTC的温度随电流的改变而改变,通过控制风扇的转速来控制风量的大小,进而控制PTC的温度。考虑到被控对象是一个十分复杂的热电耦合系统,而且应用模糊控制理论也无需建立精确的数学模型,因此,为了研究方便,在不影响计算结果的前提下,作如下简化:
1)只考虑PTC热敏电阻的热传导和热对流,忽略热辐射的影响;
2)假设风扇产生的风量全都用于 PTC的散热,忽略风扇自身的发热量;
3)认为环境温度恒定;
单位时间内 PTC的热量变化=单位时间内PTC自身的发热量—单位时间内风扇带走的热量—单位时间内PTC向周围传递的热量,即式(10)所示:
由ANSYS仿真分析得到PTC电流随温度变化的关系如式(11)所示。
式中,cP—PTC材料的比热容,Pρ—PTC材料密度,vP—PTC热敏电阻的体积,T1—PTC表面的温度,T2—风扇吹过PTC后送风的温度,T—环境温度,k—PTC的导热系数,A—PTC的导热面积,G—送风量,U—施加在PTC上的电压,I—流过PTC的电流。
上三式带入数据整理得:
3 仿真结果分析
利用 Matlab/Simulink仿真,先用Matlab的模糊仿真工具箱建立一个关于温度的控制器,设定 PID控制器的初始参数为Kp=1 5,Ki=5,Kd=3,目标稳定为20°C,设定仿真时间为100 s。得出的仿真结果如图3所示。
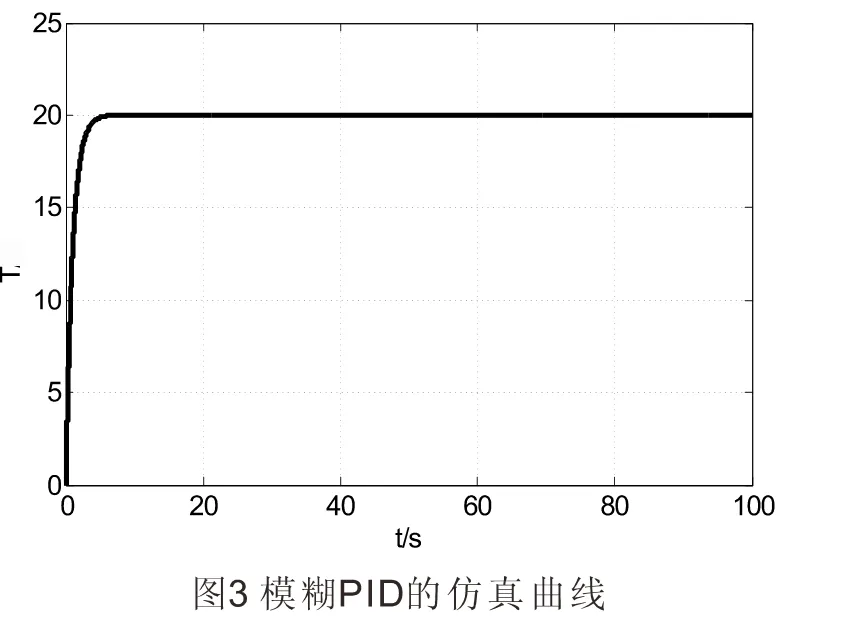
4 结论
本文提出了一种新型有效的恒流控制方法,通过控制温度来达到控制电流的目的,对此提出了一种基于模糊控制的自整定 PID控制器。在Matlab/Simulink环境中进行仿真,从仿真结果可以看出,系统的调节时间短,可以有效地抑制超调,达到了预期的控制效果,为今后恒流放电装置的设计打下了良好的基础。
[1]刘航,等.MATLAB在模糊控制系统设计与仿真中的应用[J].计算机应用研究,2001.
[2]杨卫中,王一鸣,李海健.温室温度模糊控制参数在线自整定算法[J].农业机械学报,2009.
[3]屈毅,赖展翅.基于模糊PID的控制的温室控制系统[J].计算机应用,2009.
[4]范子荣,张友鹏.基于温度系统的模糊自适应 PID控制器的设计与仿真[J].兰州交通大学学报,2006,25(3): 92-95.
猜你喜欢
大学物理实验(2022年3期)2022-10-20
厦门大学学报(自然科学版)(2022年4期)2022-07-15
环球时报(2020-08-11)2020-08-11
现代装饰(2020年7期)2020-07-27
物理与工程(2020年1期)2020-06-07
青年生活(2019年27期)2019-10-21
机电工程技术(2018年10期)2018-12-06
商(2016年28期)2016-10-27
自动化与仪表(2014年10期)2014-02-26