农药喷洒多旋翼无人机控制系统研究
2015-01-27 07:36黄水长赵伟雄
自动化与仪表 2015年5期
黄水长 ,栗 盼 ,赵伟雄
(1.河北工程大学 信息与电气工程学院,邯郸 056038;2.贵州大学 电气工程学院,贵阳 550025)
目前我国农药喷洒方式主要为地面人工喷洒,落后的喷洒器具和技术普遍存在,与当前农药的发展水平极不相称,已对农林业病虫草害的防治带来了很多不良的影响,比如对农药的利用率低,农药残留、作物药害、污染环境等。另外,这些方式喷洒效率低,还可能会对工作人员的健康造成威胁[1]。无人驾驶飞机UAV(unmanned aerial vehicle)近几年发展比较迅速,尤其是多旋翼无人机,它凭借其成本低、飞行灵活、可低空低速飞行等特点,在很多领域都得到了一定的应用,比如军事侦察、空中航拍、交通监测、地形勘测等[2]。在农业领域中,采用多旋翼无人机进行农药喷洒工作具有作业高度低、可定点喷洒、无需起落跑道等特点,可以明显提高作业效率,并且其旋翼往下产生的气流可以让农药喷雾得到更好的穿透性,提高防治效果和农药的利用率[3]。本文结合空中作业喷洒农药对无人机飞行的需求,对小型多旋翼无人机的控制系统进行研究。
1 控制系统总体设计
1.1 系统需求
为了能够方便、安全、可靠地进行空中喷洒农药,以下针对多旋翼无人机的特点,对控制系统提出需求:
(1)处理器具有良好的运算性能,能够满足控制软件的运行要求。
(2)具有姿态估计系统,能够得到较精确的实时无人机姿态及高度。
(3)具有高度自锁定功能,可以在作物上空定高进行农药喷洒,防止因为喷洒高度不一致导致作物药害的情况发生。
(4)具备无线通信功能,能够与遥控器和地面站通过无线进行连接。如果与遥控器失联,无人机必须悬停在原地并关闭喷洒系统。
(5)可通过输出脉宽调制 PWM(pulse width modulation)波形的方式对喷洒系统的喷洒速度进行动态控制。以便满足不同农药试剂和作物对喷洒速度的不同需求。
1.2 总体设计
为了减少不同功能之间的耦合会增强系统的可维护性,控制系统采用模块化设计,总体结构如图1所示。
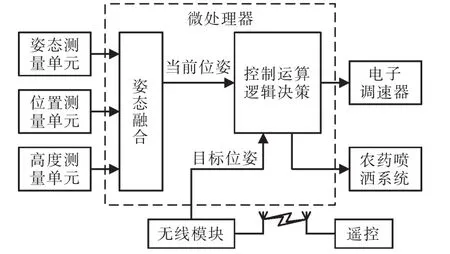
图1 系统组成框图Fig.1 Block diagram of the system
多旋翼无人机是一种复杂的系统,它在空间有6个自由度,分别是沿机身3个轴平移和旋转[4]。在姿态控制方面,由于其平移速度和旋转角度存在直接耦合关系,所以要想满足在空中稳定飞行,前提便是利用精确的传感器结合有效的融合算法获取较精确的姿态数据。
由于无人机的飞行范围比较大,与其通信的方式若采用有线将造成诸多不便,所以在通讯方面,系统采用无线的方式与其连接。无人机的动力来源于旋翼电机,在电机控制方面,为了能够获得良好的控制效果和维护便捷性,采用模块化的电子调速器控制,主控芯片只需给其提供PWM波形即可。当今电动喷洒系统大多是利用PWM控制喷洒速度[5],所以,为满足喷洒控制,系统具备输出PWM波形功能。
2 控制系统硬件设计
2.1 部件选型
(1)处理器:系统所有的传感器数据都由处理器采集并运算,同时给出控制数据和控制逻辑,所以处理器是控制系统的硬件核心单元,选择一个合适的处理器对系统的整体效果非常重要。本文采用意大利ST公司的STM32F427VIT6处理器,它是一个32位处理器,采用ARM Cortex-M4内核,主频最高可达到168 MHz,内部资源丰富,并且拥有内存直接访问DMA(direct memory access)功能和浮点运算单元FPU(float point unit),能在最小干预的情况下快速完成数据搬运和浮点运算功能,有力保障控制系统的可靠性和实时性。
(2)传感器:姿态测量系统含有的传感器包括加速度计、陀螺仪、电子罗盘和气压计。考虑到测量精度和系统体积的大小,本文采用MPU6000芯片,它是集三轴加速度计和三轴陀螺仪一体的高精度数字接口传感器,通过SPI接口和主控芯片进行通信,通信速度可达18 Mb/s。电子罗盘采用美国Honeywell公司的HMC5843芯片,可以灵敏地探测到微小的磁场强度变化,利用地磁校正无人机方向。气压传感器采用瑞士MEAS公司设计的MS5611,凭借其超低功耗、超高精度的24位Σ型AD转换器和高线性度压力传感器,高度测量精度可达到0.1 m。由于实际飞行中,大气压会受到各种因素的影响,导致无人机测量的高度不准确,所以,本文额外采用一个超声波测距模块,能在0.1 m~5 m的有效测量范围内达到0.02 m的精度,并且具有一定的抗干扰性,有效保证无人机喷洒工作时的高度锁定功能。
(3)无线通讯:无人机起飞后旋翼速度非常高,在人不能接近的情况下,必须保证能够控制其飞行方向和速度,所以无线部分不可或缺,本文采用XBEE技术与无人机进行无线通讯,在功放的作用下,有效传输距离能达到1 km,能保证在喷洒工作时连接的稳定性。为了节省无线带宽和方便布线,采用脉冲位置调制PPM(pulse position modulation)方式对控制系统与遥控器之间的通信信号进行调制处理。
2.2 硬件设计
系统的硬件结构如图2所示。由于无人机在飞行时旋翼电机产生较大的电流,并且电流变化较快,会产生电磁干扰,所以为了减少通讯出错,超声波模块与控制芯片的连接经过MAX485芯片进行电平转换,采用485协议进行通信,增强抗共模干扰能力。同时为了减少传输信号的反射,在总线的起始端和末尾端各接上一个120 Ω的匹配电阻。电平转换电路如图3所示。
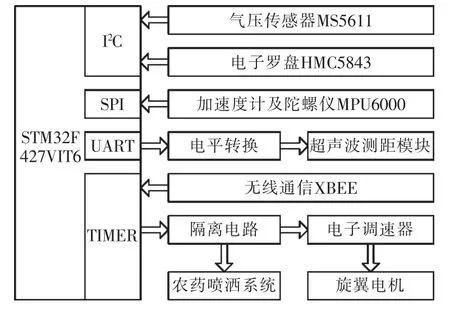
图2 系统硬件结构Fig.2 Hardware architecture of the system
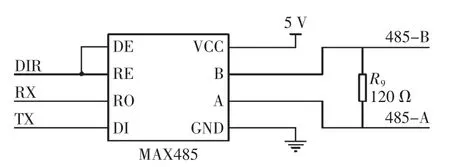
图3 电平转换电路Fig.3 Level conversion circuit
由于电机的速度时刻在变化,电压也随着波动,为了防止电机的反向电压通过电调回馈至主控电路烧毁器件,主控芯片与电调之间的连接必须采用隔离电路。另一方面,为了精确地控制电机的转速,电调输入的PWM频率采用400 Hz的高刷新率。普通的光耦频率不能满足,并且体积较大,不利于控制系统的集成[6]。结合这2个因素,系统采用2片ADI公司的4通道数字信号隔离芯片AduM1411进行信号隔离,它能在1.3mA的工作电流下达到2 M的传输速率,能在有效保证PWM信号真实度的前提下,降低系统功耗和保护主控电路的安全。对喷洒系统的控制也采用PWM方式,隔离方式和电调隔离方式一致,电路如图4所示。
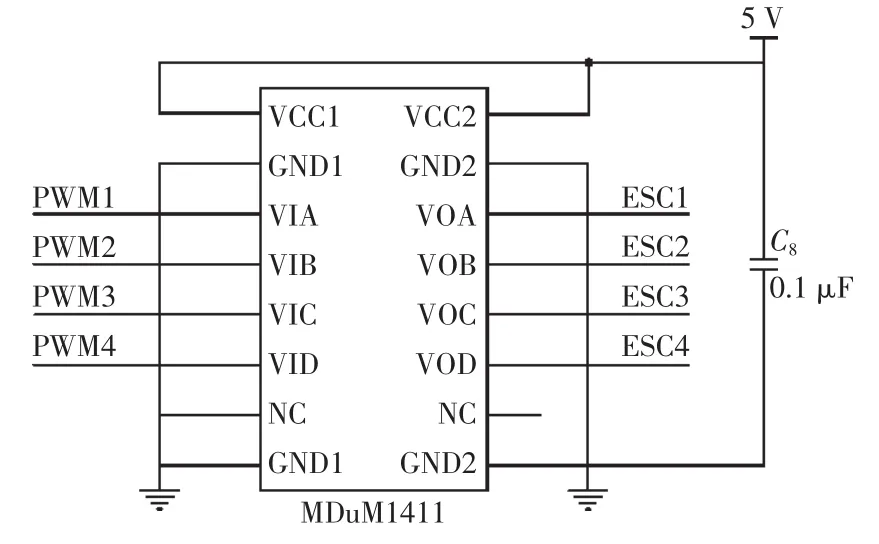
图4 信号隔离电路Fig.4 Signal isolation circuit
3 控制系统软件设计
软件的主要功能为姿态获取及控制、遥控数据解析、通信状况实时分析。与功能相对应,将农药喷洒无人机的系统软件分为3大部分。软件流程如图5所示。
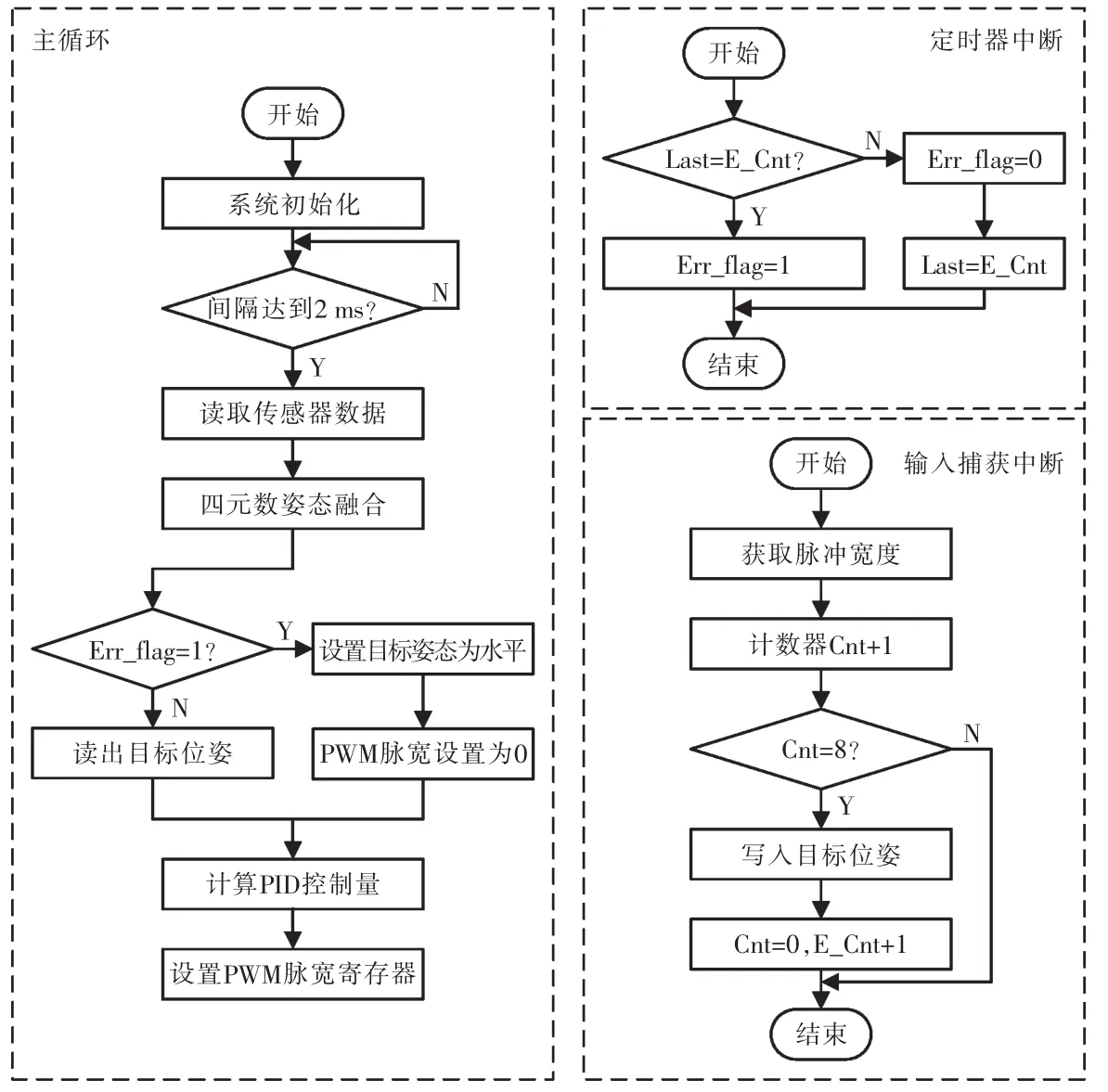
图5 软件流程图Fig.5 Flow chart of the program
第1部分利用主控芯片的PWM输入捕获功能,在捕获中断子程序中获取遥控器的8路数据,计算目标位姿并存入内存等待主函数读取,退出前将消息计数器的值加1,为判断无人机与遥控器之间的联系是否中断提供依据。
第2部分是定时器中断函数,每隔25 ms运行一次,检查遥控器计数值是否发生变化,若中断函数中存储的值与当前遥控器数据计数值不相等,说明通信正常,若相等,则说明无人机与遥控器已经失去联系,此时立刻设置通信错误标志位,通知主函数采取相应措施。
第3部分为主函数部分,大多数功能都在此实现。系统启动后首先初始化各个模块,然后依次读取各个传感器的数据进行位姿计算[7],若此时发现通讯错误标志,则把目标位姿数据设置为水平,无人机将会停在原地,并关闭喷洒系统;若未发现通讯错误标志,则读取输入捕获中断程序提供的目标位姿信息,运行PID控制算法获取控制量并转换成脉冲宽度数据[8],最后通过DMA将数据硬件搬运至相应的寄存器,从而改变旋翼电机的转速,达到快速调节的效果。
4 实验结果
将设计的控制系统搭载四旋翼飞行器机架在室外进行试飞,通过地面站获取无人机的姿态角信息,将其导入至Matlab仿真软件中,绘制出3个姿态角:翻滚角、俯仰角、航向角和高度的跟踪曲线,分别如图6和图7所示。从曲线可看出,本文设计的控制系统能够快速地跟踪遥控器给出的目标姿态,并且在调节稳定后,实际输出曲线和参数输入曲线非常接近,实现了很小的控制误差,验证了控制系统的有效性。
5 结语
针对我国当前农药喷洒方式的弊端,对一种小型多旋翼农药喷洒无人机的控制系统进行研究,以STM32做为主控芯片,结合多种传感器,实现了无人机姿态的估计和控制。经过多次试飞,验证了系统良好的控制性能。此外,系统可在飞行中动态地对喷洒系统进行开关控制、在通讯中断的情况下采取应对措施保证无人机和操作者的安全,能够满足空中喷洒农药对飞行的需求。
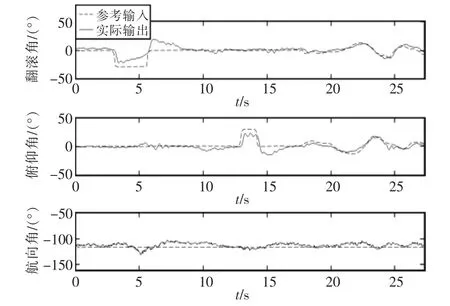
图6 姿态角控制跟踪曲线Fig.6 Attitude control tracking curve

图7 高度控制跟踪曲线Fig.7 Altitude control tracking curve
[1]贾卫东,张磊江,燕明德,等.喷杆喷雾机研究现状及发展趋势[J].中国农机化学报,2013(4):19-22.
[2]李一波,李振,张晓东.无人机飞行控制方法研究现状与发展[J].飞行力学,2011,29(2):1-5,9.
[3]徐兴,徐胜,刘永鑫,等.小型无人机机载农药变量喷洒系统设计[J].广东农业科学,2014,41(9):207-210.
[4]甄红涛,齐晓慧,夏明旗,等.四旋翼无人直升机飞行控制技术综述[J].飞行力学,2012,30(4):295-299.
[5]张涛涛,张文爱,王秀.基于PWM变量农药喷洒控制系统的研究[J].农机化研究,2012(7):57-60.
[6]温习,阎永禄.典型信号隔离电路设计[J].四川兵工学报,2011,32(8):94-95.
[7]乔相伟,周卫东,吉宇人.基于四元数粒子滤波的飞行器姿态估计算法研究[J].兵工学报,2012,33(9):1070-1075.
[8]王史春.四旋翼飞行器PID优化控制[J].河北科技大学学报,2013,34(5):457-463,486.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
小猕猴学习画刊(2021年8期)2021-08-27
军民两用技术与产品(2021年9期)2021-03-09
作文大王·低年级(2020年9期)2020-10-12
作文大王·低年级(2020年9期)2020-10-12
学生天地(2020年3期)2020-08-25
电子制作(2019年9期)2019-05-30
知识就是力量(2019年12期)2019-01-14
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26