
反潜无人水面艇及其声呐设备
2015-02-21 02:15王家鑫海军驻上海地区军事代表局上海201206
声学与电子工程 2015年2期
王家鑫(海军驻上海地区军事代表局,上海,201206)
反潜无人水面艇及其声呐设备
王家鑫
(海军驻上海地区军事代表局,上海,201206)
摘要无人水面艇具有轻小、反应快速、机动灵活和廉价等优点。介绍了美国典型的反潜无人艇情况,对其发展思路进行了初步探讨,最后讨论了发展无人艇的一些设想和建议。
关键词无人水面艇;反潜;遥控;持续跟踪;声呐设备
无人水面艇(USV)在军民领域均具有广泛用途。特别是用于作战,可避免人员伤亡,因此受到广泛重视。以美国为代表的西方发达国家把USV的军事用途归纳为:反水雷(MCM)、反潜战(ASW)、海上安全(MS)、水面战(SuW)、特种作战支持(SOF)、电子战(EW)、海上封锁支持(MIO)等七项。反潜无人水面艇的艇型主要有四种级别,即X级(小型非标准型,艇长3 m或5 m)、Harbor级(港口级,艇长7 m)、Snorkeler级(通气管级,艇长11 m,半潜)和Fleet级(舰队级,艇长11 m)[1]。
无人艇除能源和推进系统外,一般配备有保证自主航行的控制、雷达、光电探测成像、卫星导航、通信和遥控等多种设备,同时为执行上述使命任务,还需要搭载相应的任务系统(或称任务模块,包括相应的传感器和武器等)。本文主要讨论反潜战(ASW)相关的问题。
1 美国反潜无人艇
1.1遥控反潜无人艇
遥控反潜无人艇主要供水面舰艇或其编队进行周边海域的遥控反潜,其搭载的反潜模块根据任务需求具有不同配置。
1.1.1舰队级反潜无人艇[2]
图1是舰队级反潜USV及其搭载设备示意图,艇长11 m,前部有一可遥控的五管发射器,可发射3枚声呐浮标、一枚UUV(具体为可扩展的反潜战训练目标EMATT)和一架无人机UAV(用作中继通信),它的后部还配置了双管发射器,可发射MK54和 MK46鱼雷各一枚。对USV的操纵、数据处理和指挥控制是在火控室和操纵室内进行的,具备了上述设备配置的USV就可在母船的控制下,进行反潜作战。作战时,母船停留在可避免潜艇攻击的安全线以外,由USV来跟踪和攻击潜艇。
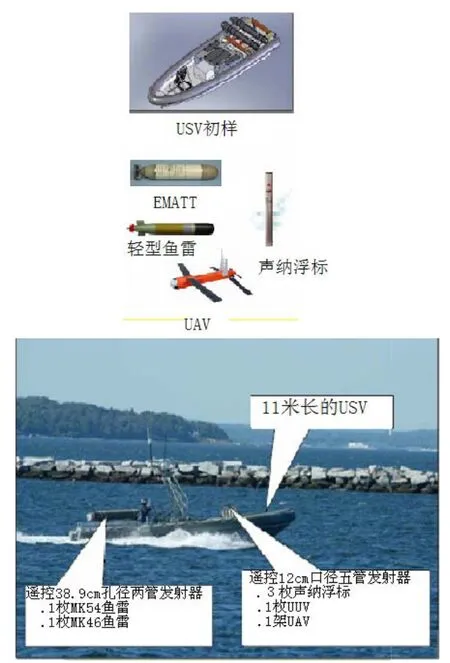
图1 反潜USV及其搭载的设备

图2 用USV反潜过程示意
具体的过程如图2示。其中:(1)红方潜艇经海峡进入时,被海底的传感器场感知;(2)蓝方收到可能有潜艇进入的警报;(3)蓝方主战平台发射一台反潜的USV;(4)蓝方的反潜USV向推算的拦截点前进;(4a)蓝方的反潜USV到达或接近就位点时,发射一个通信用的UAV(中继USV与母船的通信联络);(5)在拦截点,蓝方反潜USV发射声呐浮标;(6)主战平台证实目标接触后向USV发送准备和射击命令;(7)蓝色反潜USV发射鱼雷,必要时再发射另外的声呐浮标监视攻击效果;(8)如有必要,重复攻击过程;(9)USV返回母船并回收。美国海军水下战研究中心NUWC对此开展了试验研究。
1.1.2滨海战斗舰(LCS)搭载的反潜USV
反潜设备配置如图3,包括:无人拖线阵声呐系统(UTAS)、无人吊放声呐(UDS)和多基地舷外声源(MSOBS)。每艘LCS可携带两艘以上USV,每艘USV仅装备上述声呐设备中的一种。拖线阵由USV尾部的绞车自动收放,主要进行被动搜索,并可与另一艘USV拖曵的舷外声源(MSOBS)进行双基地主动探测。

图3 战斗舰的反潜USV(上)及其声呐设备(下)
当然,同时使用多艘USV时也可进行多基地主动探测。当USV漂泊时可以投放声呐(UDS)进行主被动探测。滨海战斗舰USV只负责探测搜索潜艇,不进行攻击。其声呐设备接收的水声数据通过无线通信设备发回LCS母船处理。母船与USV的通信范围如图4。其中视距内的通信半径为10 n mile,经无人机或反潜飞机中继的距离半径可达100 n mile。

图4 USV与母船的通信范围示意
1.2反潜持续跟踪无人艇(ACTUV)
为能在更广大海域对柴电潜艇进行长时间监视跟踪,美国又进一步研制了可自主持续跟踪的反潜USV(ACTUV)。使用ACTUV跟踪敌方潜艇时,由于无人操控,不太需要担心其遭到潜艇的鱼雷攻击。它可以在潜艇正上方紧紧地跟踪潜艇,这使跟踪变得相对较为容易。ACTUV是在水面航行,因此可以使用柴油发动机或是燃气轮机驱动,可以毫不费力地跟上电池或AIP驱动的潜艇。无人操控意味着ACTUV可以最大程度地按照性能优先和最佳适航性原则来设计。ACTUV无人艇不配备任何武器,只用于检测和跟踪敌方潜艇,预计可以在大浪条件下自主航行60~90 d。ACTUV利用人工智能和一系列传感器来进行自主航行,包括使用各种光电传感器、长程和短程雷达,以及光线检测和测距传感器(LIDAR)等。初期设计的ACTUV采用半潜式结构(如图5)。
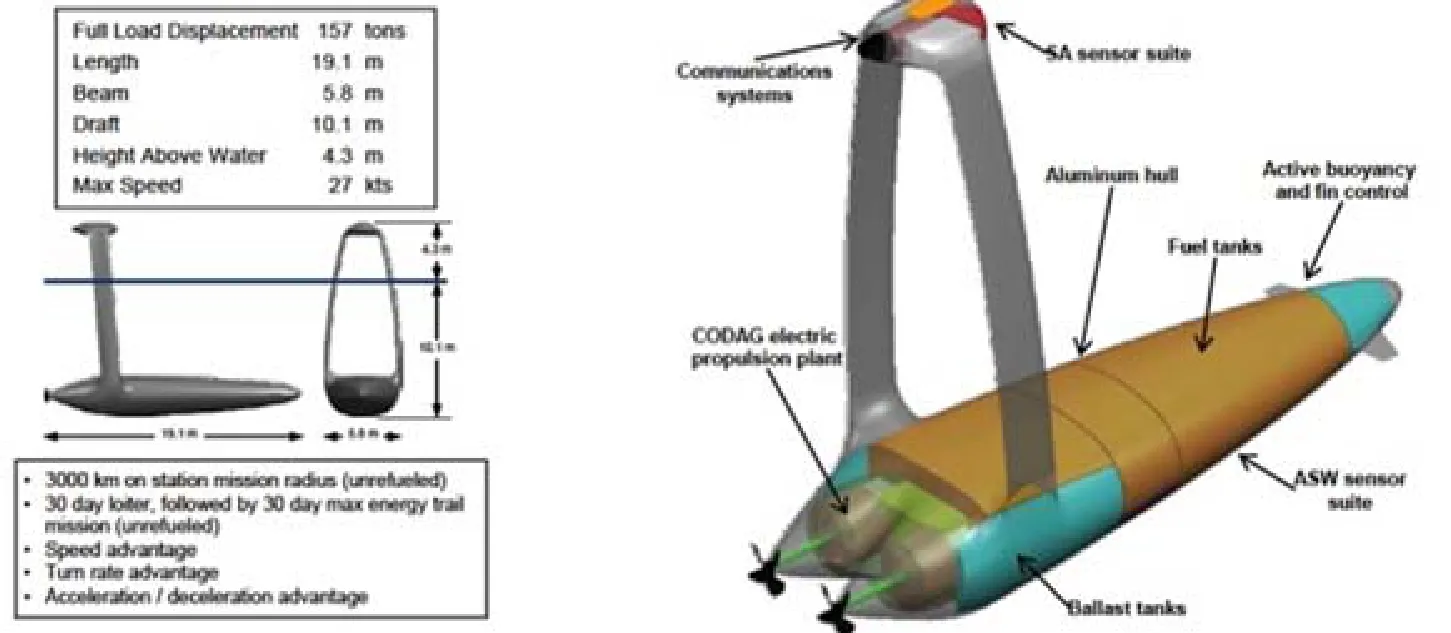
图5 半潜式ACTUV反潜无人艇
ACTUV是一艘半潜式无人水面航行器。满载排水量157 t,长19.1 m,宽5.8 m。正常情况下全艇只有一体化的发动机进气/烟囱装置和通信/传感器桅杆需要露出水面,船的主体可在水下10 m深度航行,有装备水下探潜传感器的舱段。布置在支架顶端的通信系统和合成孔径传感器可在水面上4.5 m工作。这种结构的优点是隐蔽性好。一次加油的作战半径可达3 000 km,最长待机30 d,还可接着完成最多30 d的追踪任务。同时在速度、回转和加速性能上都很先进。这种可独立布设且可超长期自主工作的无人航行器,可有效追踪敌方的低噪声柴电潜艇。
但是,后期采用的新方案则是三体船型(如图6)。该型ACTUV在其艇底安装了三部声呐。

图6 三体型ACTUV

图7 艇体下方的声呐导流罩
其中较后部的是中频主被动声呐,基阵装于流线型支架下方的圆盘型导流罩内(如图7),是雷声公司提供的SQS-56声呐的第5代产品,称作模块化可扩展声呐系统(MS3)。MS3可提供主动和被动搜索、鱼雷探测和报警、小目标规避等能力,其“湿端”传感器与SQS-56类似,但“干端”明显较小,由光纤取代了沉重的铜电缆。声呐的可更换部件数量从400个降低到15个。在中频声呐前方的艇底还安装了两部高频声呐,湿端均为升降式。当ACTUV靠近目标时,它们将用来对目标精确跟踪和识别,近距离时,ACTUV甚至能通过高频声呐检测到的声音样本判断出潜艇的生产国和型号。同时还用磁力计阵列提供有关目标活动的其他信息。
该无人艇设计可提供无人搜索、探测、被动威胁过滤、定位和跟踪能力。所有搜集到的数据将通过ACTUV的人工智能系统进行分析以判断潜艇意图。比如,潜艇的战术策略之一是利用水面船只的掩护来避免被追踪,而ACTUV可以同时监测水面船只及水下潜艇,并利用位置认知系统来不断调整其航行路线,在保持追踪潜艇的情况下避开水面船只(如图8)。当然,如果ACTUV的判断出现失误,千里之外的操作员也可以随时接管并做出必要的修正。ACTUV与母船或基地的无线联系可通过飞机(或无人机)中继进行(如图9)。
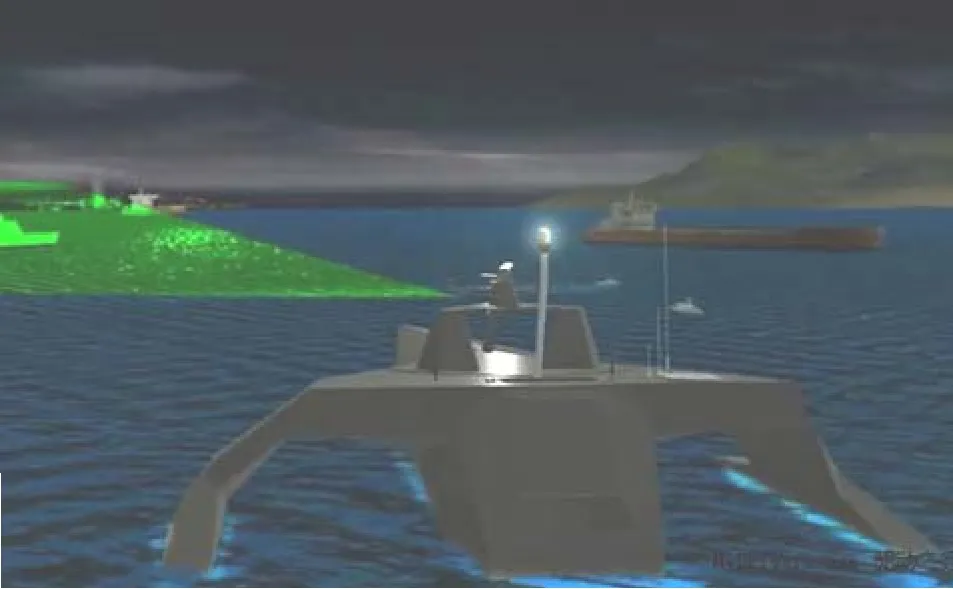
图8 ACTUV利用雷达和光电传感器探测和规避水面船舶
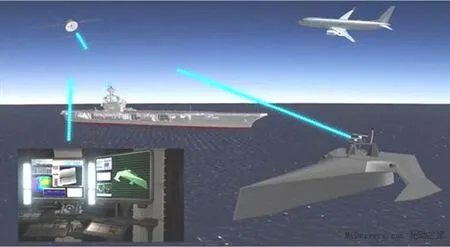
图9 ACTUV 与母船和岸基操控室的通信示意
2 反潜USV及其声呐装备发展分析
美国从单纯依靠舰艇平台声呐系统探潜,逐步发展到利用舷外手段探潜,不仅可减少平台自身条件(如平台自噪声、机动性等)的限制,而且可减少反潜作战中高价值平台和人员的风险。正因为如此,反潜无人艇从遥控操纵逐步向自主操控发展,智能化水平不断提高,使其活动范围从母船周边向大范围开阔海域发展,成为水下预警信息系统的一种机动灵活的水下信息获取手段,对潜艇活动的威胁加大[3]。
由于反潜无人艇的吨位一般较小,搭载的设备必须严格控制体积、重量。除电子设备外,机械设备(如绞车等)也需无人自主操控,这就需要通过对各种传感器数据的融合,正确理解和适应环境,自主决策。
反潜无人艇在水面高速航行时要及时发现和规避其它水面舰船,必须有可靠的雷达和光电探测器提供信息,以便调整航行轨迹实现避碰。
对反潜无人艇来说,智能化自主反潜技术是目前正在努力研究的方向。这不仅能大大降低对无人艇的通信需求,而且可使其作战范围扩大,提高作战效能。要实现自主化,无人艇必须具有感知、理解、适应环境和任务变化的能力。就声呐而言,其关键是根据对水下环境的感知,正确使用声呐设备实现对水下目标的自主检测和自主识别,这就要求在无人艇上能完成水下目标数据的自动检测和分类识别处理,在正确判断的基础上自行决策跟踪方案。
反潜无人艇使用的声呐设备从小艇仅用投射式声呐浮标发展到无人拖线阵和吊放声呐。大型无人艇已采用艇壳声呐,与反潜水面舰的配置类似,使其探测能力不断提高。但是,由于承载能力的限制,不可能装备低频声呐,所以远距离目标的信息还要依靠其它远程警戒声呐和航空声呐的配合、引导。
从单基地探测向多基地探测方向发展,是提高反潜效率的有效途径。反潜无人艇的使用也从单艇向双艇、多艇联合使用发展。随着通信和网络技术的发展,以反潜无人艇为节点的反潜网络可能成为未来的发展方向。为此,必须发展无人协同能力,通过任务共享和解决冲突来完成预定任务目标。
从技术角度来讲,反潜无人艇探测需重点研究水声目标自动检测和识别技术,对反潜USV提供的各种目标声数据进行综合处理、实现对水下目标的自动识别和跟踪。海洋环境十分复杂,由于是无人系统,对传感器数据及其处理结果出现的错误应有自主识别和调整能力。距离不同,跟踪要求的测向、定位精度不同。在近距离跟踪时必须采用高频声呐提供目标的精确位置,而且观察范围要能较好地覆盖垂直空间,特别是在潜艇上方跟踪时。另外,近距离目标识别也要依靠高频声呐提供精确的目标特征。
3 结束语
反潜无人艇是用于水下警戒的新的有效手段,由于无人艇造价低、生产周期短、试验方便,目前发展很快。如果引起足够的重视,我们在较短时间内赶超国际先进水平是有可能的。国外反潜USV使用的各种声呐设备,我们都有一定的基础和技术储备,当然要想取得成功,难点也不少,重点是要在提高设备可靠性和自动化运行能力、绞车等机械设备自动操作能力、降低设备体积重量等方面下功夫,花大力气加以解决。
参考文献:
[1] RICHARD SCOTT. Networked concepts Look to square the ASW circle[J]. Jane’s International Defense Review,2011.
[2] JACK SUPP. Seapower 21 and airborne ASW[C]. Underwater Battlespace Conference,2005.
[3] YAN RU-JIAN,PANG SHUO,SUN HAN-BING,et al. Development and missions of unmanned surface Vehicle[J]. Journal of Marine Science and Application,2010,9(4): 451-457.
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17
小哥白尼(军事科学)(2022年1期)2022-04-26
小学生优秀作文(低年级)(2021年11期)2021-12-06
小哥白尼(趣味科学)(2019年6期)2019-10-10
小学科学(学生版)(2019年6期)2019-07-10
语文世界(小学版)(2019年2期)2019-02-24
小哥白尼(军事科学)(2018年2期)2018-05-25
无人机(2017年10期)2017-07-06
中外玩具制造(2016年9期)2016-09-25
现代防御技术(2016年1期)2016-06-01
