基于高斯过程的GPS高程转换模型
2015-03-03 02:47罗亦泳姚宜斌张立亭周世健鲁铁定
测绘通报 2015年11期
罗亦泳,姚宜斌,张立亭,周世健,鲁铁定
基于高斯过程的GPS高程转换模型
罗亦泳1,2,姚宜斌2,张立亭1,周世健3,鲁铁定1
( 1.东华理工大学测绘工程学院,江西南昌330013; 2.武汉大学测绘学院,湖北武汉430079; 3.江西省科学院,江西南昌330096)
一、引言
GPS定位技术具有精度高、速度快、全天候、测站间无须通视等优点,能快速提供目标三维坐标,因此在各领域得到广泛应用。但由于GPS采用WGS-84坐标系,得到的是目标的大地高H大地,而在实际工程应用中采用的是正常高H正常,并且大地高与正常高之间存在高程异常ξ,导致GPS测量得到的高程数据不能服务于实际工程项目而造成数据浪费[1-2]。目前通常采用传统水准测量获得目标正常高,需要投入较大的人力、物力及财力,并且工作效率较低。因此,如何构建GPS高程转换模型,对利用GPS定位技术快速地为工程建设提供可靠的正常高数据具有重要的现实与理论意义,成为当前GPS研究的重要内容。
当前GPS高程转换模型研究成果较为丰富,主要包括多项式拟合、多面函数法及BP神经网络等常规方法。由于这些拟合方法均基于传统的统计理论,在具有较大的训练样本数据时,GPS高程转换成正常高具有较好的精度[3-4]。但在实际工程领域,通常具有较少的训练数据(即经过水准测量联测的GPS高程点较少),严重影响GPS高程转换精度。针对该问题,许多学者基于支持向量机构建GPS高程转换模型,对小样本数据具有较好的高程转换精度[5-6]。但是支持向量机存在核函数选择及参数优化问题,并且损失函数构建对模型影响较大。综上所述,当前GPS高程转换模型对处理小样本问题在精度、可靠性方面有待提高,并且很少对模型预测结果进行不确定分析。因此,如何构建基于小样本、参数自适应、具有概率意义的GPS高程转换模型具有重要研究价值。
高斯过程( Gaussian process,GP)是近期发展的基于统计学习理论的机器学习新方法,适合处理高维数、小样本、非线性等复杂问题,并且模型参数自适应化,具有概率式的预测结果,是当今国内外机器学习领域研究热点[7-8]。鉴于GP算法的以上特点,本文提出基于高斯过程的GPS高程转换模型。通过与其他GPS高程转换模型进行精度对比,以证实新方法的可行性及可靠性。
二、GPS高程转换的GP方法建立
利用GP算法建立目标高程异常ξ与其对应的平面坐标( x,y)之间的复杂函数关系,构建基于GP 的GPS高程转换模型。利用该模型求解其余GPS高程点对应的高程异常ξ,实现大地高与正常高之间的转换。
1.高斯过程学习回归模型基本原理
GP算法定义任意一组随机变量X = { xi∈Rd,i=1,2,…,N}及其对应的过程函数f( X) = { f( xi)∈R,i= 1,2,…,N}的联合概率密度分布服从N维高斯分布。因此,高斯过程f( X)完全由其均值函数m( X)与协方差函数K( X,X')确定[9-10]。高斯过程可表示为式中,核函数K( X,X')为正半定矩阵。

假设有观测训练数据集E = { ( xi,yi),i = 1,2,…,n},xi为模型输入,yi为受到噪声影响的模型输出观测值,噪声服从分布ε~N( 0,σ2n)。则yi可表示为

从式( 1)、式( 2)可推导y的分布,具体概率分布见式( 3),其中In为n阶单位矩阵。

对于新的输入X*,预测对应的输出为y*,y与y*的联合概率分布为

由以上公式,可得到预测值y*的后验概率分布

式中,u( X*)、σ2y*为y*的期望与方差,即

建立训练样本集E的对数边缘似然函数,对超参数求偏导,采用共轭梯度优化方法搜索出模型的超参数最优解,自适应确定模型参数,最终构建高斯过程回归模型。
2.GPS高程转换模型建立
以GPS高程点平面位置( x,y)作为GP算法的输入,对应的高程异常ξ为模型输出,构建训练数据集S={ Xi,ξi},其中Xi=( xi,yi),i= 1,2,…,n,n为训练数据个数。通过GP模型对训练数据的学习,确定对应参数,建立高程异常ξ预测模型。通过GPS高程减去高程异常预测值将GPS高程转换成正常高。基于Matlab语言和GP的GPS高程转换模型具体建立过程如下:
1)建立训练数据集S = { Xi,ξi}ni=1及测试数据集D={ Xj,ξj}Tj=1,并对S、D进行归一化。
2)选择协方差函数K( X,X'),确定模型超参数解算方法。依据文献[7]对协方差函数的分析结果,通过反复试算选择Materniso协方差函数,采用共轭梯度优化方法搜索出模型的超参数最优解。
3)训练数据集S训练GP算法,确定模型超参数。对S、D数据集的高程异常进行预测,获得对应的高程异常预测值ξi、ξj,以及对应方差σ2ξ'i、σ2ξ'j。
4)将GPS高程减去高程异常预测值ξ',预测GPS点的正常高

5)计算模型的内附精度σ内及外符精度σ外,评价模型精度

6)由GP算法估计得到的高程异常期望与方
差(ξi'、ξj'、σ2ξ'i、σ2ξ'j)可计算H常'的置信区间,分析预测结果的可靠性。以95%置信度的置信区间为例,建立GP算法置信区间估计公式( 11),其中zθ/2= 1.96[11]。

三、实例分析
1.建模数据方案建立
以某沿江地形平缓区域的GPS控制网为例,控制网包含17个控制点,平均边长约1 km,区域面积约10 km2[6]。按国家GPS网B级要求实测,采用二等水准联测各GPS点,通过计算获得17个GPS点的平面坐标、大地高、正常高、高程异数据,具体数据见表1。
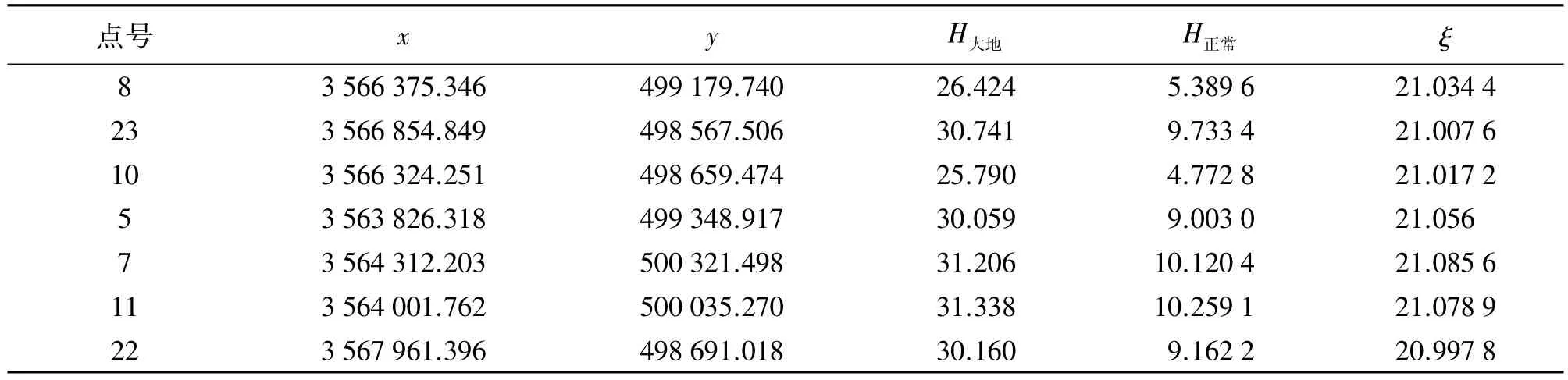
表1 GPS点平面坐标、高程数据 m

续表1
由于不同训练数据集对GPS高程转换模型精度具有较大影响,选择不同数量的训练数据集及测试数据集,构建4种建模数据方案( plan1、plan2、plan3、plan4),评价GP模型可靠性,具体方案见表2。本文同时采用平面拟合、二次曲面拟合、支持向量机( SVM)方法建立GPS高程转换模型,并与GP方法进行精度对比,证实新方法的精度优越性。

表2 建模数据方案
2.模型精度及可靠性分析
针对以上4种方案,分别基于平面拟合、二次曲面拟合、支持向量机、高斯过程算法建立GPS高程转换模型,计算不同方案的各GPS高程转换模型的内附精度σ内及外符精度σ外,对比评价模型预测精度,具体数据见表3。

表3 GPS高程转换模型精度 mm
由表3可知,对于训练数据较少的plan1、plan2方案,高斯过程模型的内附精度及外符精度明显优于平面拟合、二次曲面拟合、支持向量机方法,证实高斯过程模型能很好地处理小样本数据问题,具有很好的预测精度。当训练数据较多时,对于plan3、plan4方案,高斯过程模型精度与支持向量机相当,略优于二次曲面拟合,较大程度地优于平面拟合。
由式( 11)可计算GP算法各方案的GPS高程转换结果的置信区间。表4、表5、表6、表7分别为各方案的95%置信度的置信区间。
将各GPS高程点实测正常高与各方案的GP模型置信区间数据(表4、表5、表6、表7)进行对比,实测正常高均落在各方案GP算法估计得到的置信区间内,证实基于GP的GPS高程转换模型对不同数量特征训练集具有可靠的建模精度,证实了新方法的可靠性。

表4 plan1方案置信区间 m

表5 plan2方案置信区间估计m

表6 plan3方案置信区间估计 m

表7 plan4方案置信区间估计m
四、结论
本文提出了基于GP的GPS高程转换模型,并构建了不同的建模方案。通过与多种GPS高程转换模型进行精度对比及置信区间分析,得到以下结论:
1)基于GP的GPS高程转换模型针对4种方案均取得很高精度。当训练数据较少时,GP方法的内附精度σ内及外符精度σ外明显优于平面拟合、二次曲面拟合、支持向量机方法,证实GP模型处理小样本GPS高程转换问题具有很高的精度。
2)通过建立基于GP的GPS高程转换结果的置信区间估计方法,计算4种方案的正常高转换结果置信区间。实测正常高均在置信区间内,证实新方法的结果具有很高的可靠性。同时弥补了当前GPS高程转换方法很少对预测结果进行可靠性分析这一缺点。
[1] 胡伍生,华锡生,张志伟.平坦地区转换GPS高程的混合转换方法[J].测绘学报,2002,31( 2) : 128-134.
[2] 胡伍生,高成发.GPS测量原理及其应用[M].北京:人民交通出版社,2004.
[3] 杨明清,靳蕃,朱达成,等.用神经网络方法转换GPS高程[J].测绘学报,1999,28( 4) : 301-307.
[4] 杨天宇.基于BP神经网络的GPS高程异常拟合及其在杭州湾跨海大桥中的应用[D].成都:西南交通大学,2006.
[5] 吴兆福,宫鹏,高飞,等.基于支持向量机的GPS似大地水准面拟合[J].测绘学报,2004,33( 4) : 303-307.
[6] 丛康林,岳建平.基于SVR的GPS高程拟合模型研究[J].测绘通报,2011( 2) : 8-12.
[7] RASMUSSEN C E,VVILLIAMS K.Gaussian Process for Machine Learning[M].[S.l.]: The MIT Press,2006.
[8] GIBBS M N.Bayesian Gaussian Processes for Regression and Classification[D].( PhD Thesis) Cambridge: Universityof Cambridge,1997.
[9] KOCIAN J,AZMAN K.Gaussian Process Model Identification: a Process Engineering Case Study[J].Systems Science,2008,34( 3) : 31-38.
[10]贺建军.基于高斯过程模型的机器学习算法研究及应用[D].大连:大连理工大学,2012.
[11]卢献健,晏红波,梁月吉,等.各组合模型在GPS高程拟合中的应用研究[J].测绘通报,2015( 5) : 20-23.
[12]罗玉彬,牛冉雯.样本数据归一化对GPS高程转化结果的影响分析[J].测绘通报,2013( 8) : 33-35.
[13] 盛骤,谢式千,潘承毅.概率论与数理统计(新版) [M].北京:高等教育出版社,2010.
GPS Height Transformation Model Based on Gaussian Process
LUO Yiyong,YAO Yibin,ZHANG Liting,ZHOU Shijian,LU Tieding
针对GPS高程转换的小样本、非线性特点,基于高斯过程算法提出了具有概率意义的GPS高程转换模型。利用高斯过程采用4种不同建模方案建立了GPS高程转换模型,并与平面拟合、二次曲面拟合、支持向量机方法进行了精度对比。同时构建了基于高斯过程的GPS高程转换结果置信区间估计方法,分析了结果的可靠性。实例分析证实,高斯过程方法针对4种方案均获得很高精度,并且精度指标优于其余3种方法;各GPS点的实测正常高均在置信区间内,证实高斯过程方法具有很好的可靠性。
高斯过程;高程转换;高程异常
罗亦泳( 1982—),男,博士生,讲师,主要从事测绘数据处理理论与方法研究工作。E-mail: ecityyluo@ 163.com
罗亦泳,姚宜斌,张立亭,等.基于高斯过程的GPS高程转换模型[J].测绘通报,2015( 11) : 11-14.
10.13474/j.cnki.11-2246.2015.0335
P228.4
B
0494-0911( 2015) 11-0011-04
2015-04-17;
2015-07-10
国家自然科学基金( 41374007) ;江西省自然科学基金( 20151BAB213031)
猜你喜欢
杭州师范大学学报(自然科学版)(2021年6期)2021-12-07
湖北师范大学学报(自然科学版)(2021年3期)2021-09-08
数学物理学报(2021年1期)2021-03-29
当代陕西(2020年23期)2021-01-07
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
铁道通信信号(2018年9期)2018-11-10
消费导刊(2017年8期)2018-01-18
电影故事(2015年16期)2015-07-14
全球定位系统(2015年4期)2015-02-28