网络控制系统的性能仿真研究
2015-04-09 12:35杜成林张旭辉吴海雁赵友军娄伶俐
重型机械 2015年4期
杜成林,张旭辉,吴海雁,赵友军,娄伶俐
(1.西安重工装备制造集团有限公司,陕西 西安 710054;2.西安煤矿机械有限公司,陕西 西安 710032)
0 前言
在现代煤矿生产中网络系统是煤矿企业信息无缝集成的纽带,也是远程控制甚至实现少人或无人工作面的关键[1]。分布式环境下的控制系统由被控对象、传感器、控制器、执行器、以及数字通信网络组成。系统通过通信网络传输检测、控制、协调和指令等信号,而估计、控制和诊断等功能在不同的分布式网络节点中进行。根据不同的通信网络状况,时延、丢包等现象对基于网络的控制系统性能影响巨大。在系统设计分析时若不考虑这些问题,会降低系统的控制性能,甚至导致系统的不稳定[2][3]。因此,工业以太网用于实时控制场合时,研究者更关心的是网络传输环境下被控系统的性能。
通过采用缩小冲突域、流量控制、提高智能设备或通信处理单元的性能、实时通信协议等措施可以得到一定的保障[4]。但是由于网络时间和空间上的复杂性,分布式网络、节点的数据获取困难,搭建实验台模型受限、易破坏、难以重用,且费用高,对网络控制系统的性能进行定量评价难度较大。借助网络模拟仿真软件对控制系统进行分析、研究和设计是一种快速而经济的辅助手段[5]。本文借助仿真方法,研究网络时延、采样速率和网络信息传递时间间隔等因素对网络控制系统实时性能的影响,并通过网络性能综合评价策略来优化系统的通信参数,提高煤矿设备实时性和可靠性。
1 网络控制系统实时性能建模分析
图1为考虑时延的网络控制系统典型结构。图中ZOH(Zero-order hold)为零阶采样保持器,τsc为传感器到控制器的时延,可通过设计合理的观测器进行补偿,最终获得能用于控制计算的无时延的对象状态近似值。τca为控制器到执行器的时延。本文为了简化分析,将系统的计算延迟归到τca考虑。
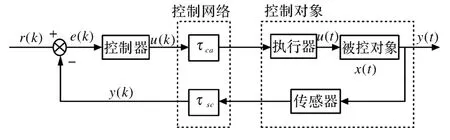
图1 具有时延的网络控制系统框图Fig.1 Block diagram of network control system with time delay
一些特殊的网络协议能够保证网络延迟为常数,如CAN 总线协议[5],但许多其它的网络协议导致的网络延迟是时变的,如DeviceNet、无线网络和Ethernet[6]。将时变延迟常数化处理的一种解决方法是在接收端引入缓冲区。此方法可使系统分析简化,不足之处是延迟按所有数据包传输延迟的最坏情形来考虑,导致分析与设计结果的保守性。考虑许多实际的网络控制系统中,控制器和驱动器是放置在被控对象端,可以认为不存在数据丢包的影响。
假设系统中连续被控对象的状态方程为
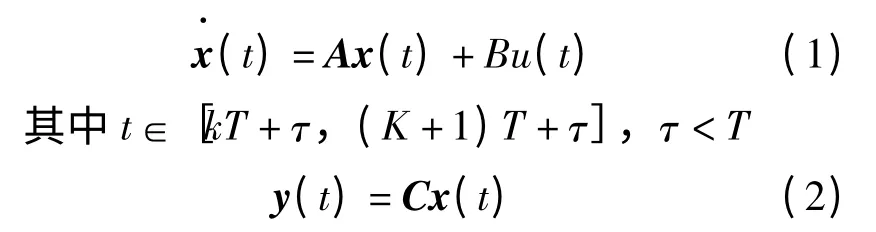
其离散线性控制率为

式中,x(t)为系统状态;u(t)为控制输入;y(t)为系统输出;A、B、C为具有相应维数的矩阵。
2 时延对网络控制系统性能的影响
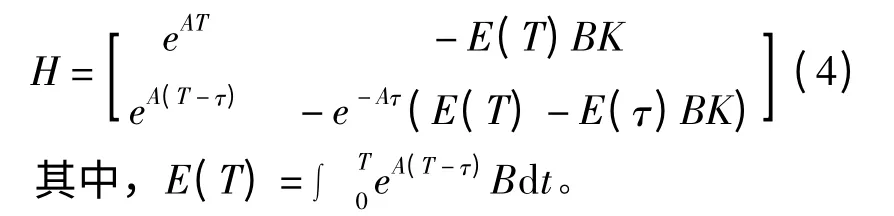
针对控制回路总时延的几种不同情况,岳东、彭晨等人给出了几个保证系统渐进稳定的条件,保证系统的解在采样点的值渐进收敛[7]。通过在执行器和控制器端通信模块中引入缓冲区,将CSMA/CD 导致的随机时间延迟变成了定常时延。因此,网络控制系统的稳定性问题化为检验矩阵的Schur 稳定性问题[8]。
具有恒定时延的网络控制系统,系统稳定性可归结为检验矩阵(4)的Schur 稳定性问题。
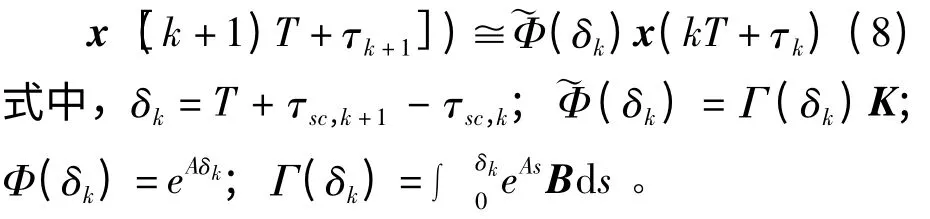
对象的被控状态x(kT +τsc,k)的估计值由kT时刻的采样输出以及时延τsc决定。当系统全状态反馈时,通过观测器对时延τsc的补偿获得更准确的对象被控状态值。本文假定系统对象的状态方程如式(1)、式(2),并考虑到控制器模型,则其解析解可以表示为

图2 是系统存在全状态反馈时观测器的时序示意图。
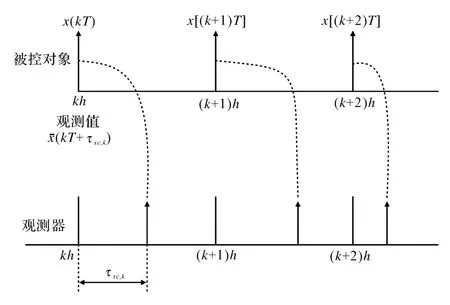
图2 全状态反馈下被控对象和观测器时序Fig.2 Time sequence of controlled object and observer in full state feedback
图中τsc,k表示对象被控状态为x(kT)时传感器到控制器之间的时延;¯x(kT +τsc,k)是状态x(kT)时实验观测值。假设在采样过程中不存在测量噪声,那么状态x(kT)带有时延的观测值¯x(kT+τsc,k)为

系统的反馈控制器为

根据此控制策略,该闭环控制系统可以表示为
以上分析可见,在传感器采用时间驱动方式的网络控制系统中,通过构建的观测器进行时延τsc估值,可以获得能用于系统分析的对象状态近似值。
采用Jitterbug 工具箱,搭建分析网络控制系统时延仿真平台,对各种时延情况下的线性闭环控制系统静态性能进行仿真分析。Jitterbug 有两个重要的并行模块所组成:信号模块和时序模块,如图3 所示。
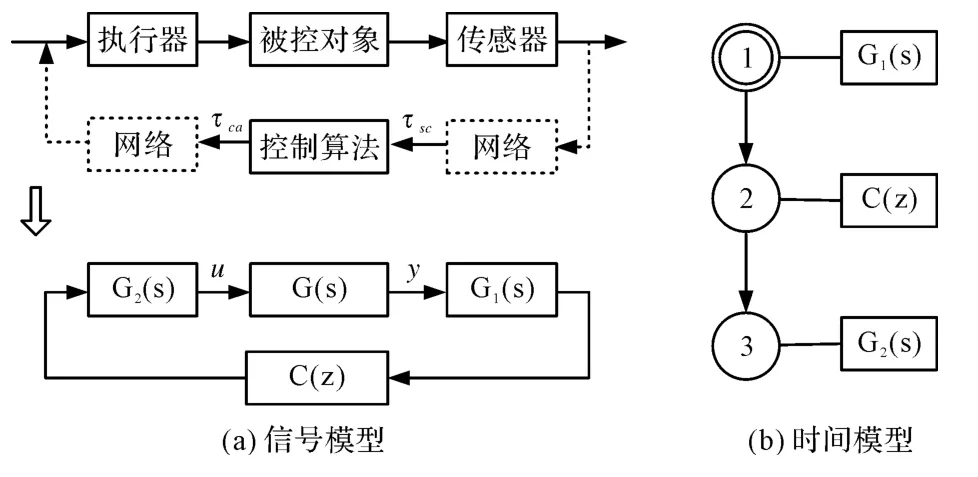
图3 NCS 的Jitterbug 模型Fig.3 Jitterbug model of network control system
Jitterbug 采用一个二阶性能评估标准,研究各种变化时序情形下的系统性能,即

控制系统总的代价函数可以通过所有的连续和离散系统的输入输出总合计算,即

以直流伺服系统为被控对象,传递函数G(s)=1000/s(s +1),传感器和执行器为离散时间系统,G1(z)=G2(z)=1。被控对象通过网络与一个PID 控制器相连,输入为方波信号。在固定采样时间周期内,传感器对输入信号进行采样,并送往控制器计算,然后送入执行器进行处理。由公式:

利用Jitterbug 计算在固定时延时的性能指标函数值,并绘制出J 同采样周期和时延的关系结果如图4 所示。
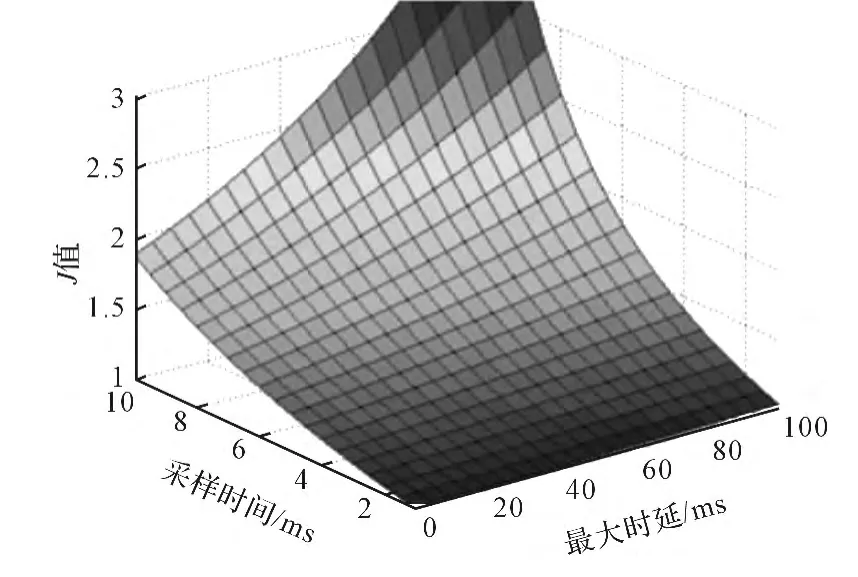
图4 随机时延情况下系统性能指标曲线Fig.4 System performance index curve in random time delay
控制系统采用PD 控制器(K=1.5,Td=0.035),并且为了使得NCS 产生的时延和抖动效应清晰可见,采样间隔时间设置h=10 ms。图中x 轴为NCS 的网络时延,y 轴表示采样周期,z 轴为系统的性能指标函数值J。由图可知,随着时延增加,J 也增大。采样周期为8 ms,没有时延时,J <2;但时延占采样周期60% 时,性能指标函数值J 变为无穷大,导致系统不稳定。因此,采样周期和时延变化影响控制系统的性能。
在基于以太网的控制系统中,CSMA/CD 协议使得网络时延是随机的,可以在接收端采用缓冲区的方式将随机延迟进行常数化处理,但会导致系统的参数选取会趋于保守。利用Jitterbug 计算NCS 在固定时延情况下的性能指标函数值J,绘制出的结果如图5 示。分析可见,系统不稳定的区域扩大,这主要是网络延迟按数据包传输最坏情形考虑而导致。
利用Jitterbug 可分析对网络延时的补偿策略,让控制器参数随着网络传输时延做动态的调整。参考经验或者实验确定时延值和控制参数存储在表中。控制系统补偿过程中控制器首先决定时延τsc,然后根据τsc值估计出系统的传输总时延,再利用总时延值查表得出对应的控制器参数,通过控制器计算输出控制信号,实现系统的控制。对控制系统进行补偿时采用补偿参数如表1 所示。补偿后的随机时延的系统代价函数如图6 所示,与图4 相比可见,通过补偿使系统性能得到改善。

图5 固定时延情况下系统性能指标曲线Fig.5 System performance index curve in fixed time delay
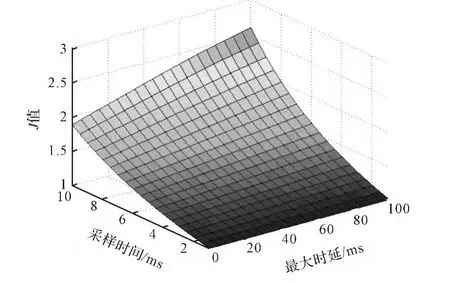
图6 时延补偿后的系统性能指标函数曲线Fig.6 System performance index curve after time delay compensation
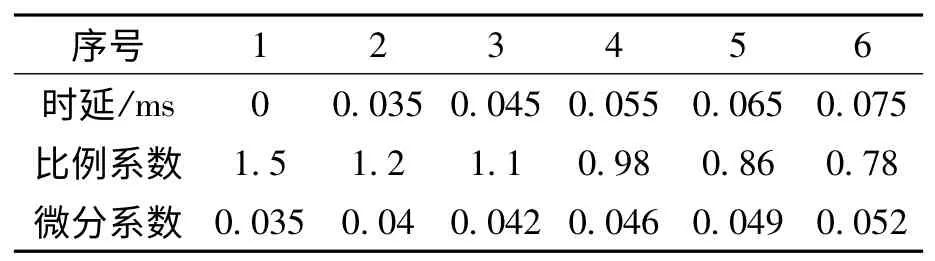
表1 补偿参数表Tab.1 Compensation parameters table
3 分布式实时控制系统性能仿真分析
3.1 基于TrueTime 的网络控制系统仿真模型
TrueTime 工具箱是瑞典Dan Henriksson 和Anton Cervin 等学者研发的网络控制系统仿真工具箱,可以对网络时延、网络参数对系统性能的影响、控制方法、网络调度等多方面进行综合仿真研究。TrueTime 工具箱主要包括Kernel 和Network 两个模块。Kernel 核心是灵活的实时内核,系统预定义了多种调度策略,包括固定优先级(Fixed Priority,FP)、单调速率(Rata Monotonic,RM)、截止期单调(Deadline Monotonic,DM)、最小截止期优先(Earliest Deadline First,EDF)等。Network 模块采用事件驱动方式,当有消息进出网络时,网络模块执行工作。将TrueTime中的模块与Simulink 中的常用模块相连,就可以构建相应的实时控制系统或网络控制系统。
搭建一个基于TrueTime 的NCS 仿真系统,以直流伺服系统为被控对象,系统用传感器模块、执行器模块、扰动模块和通信过程等四个模块来建立分布式伺服控制系统的闭环仿真模型,如图7 所示。
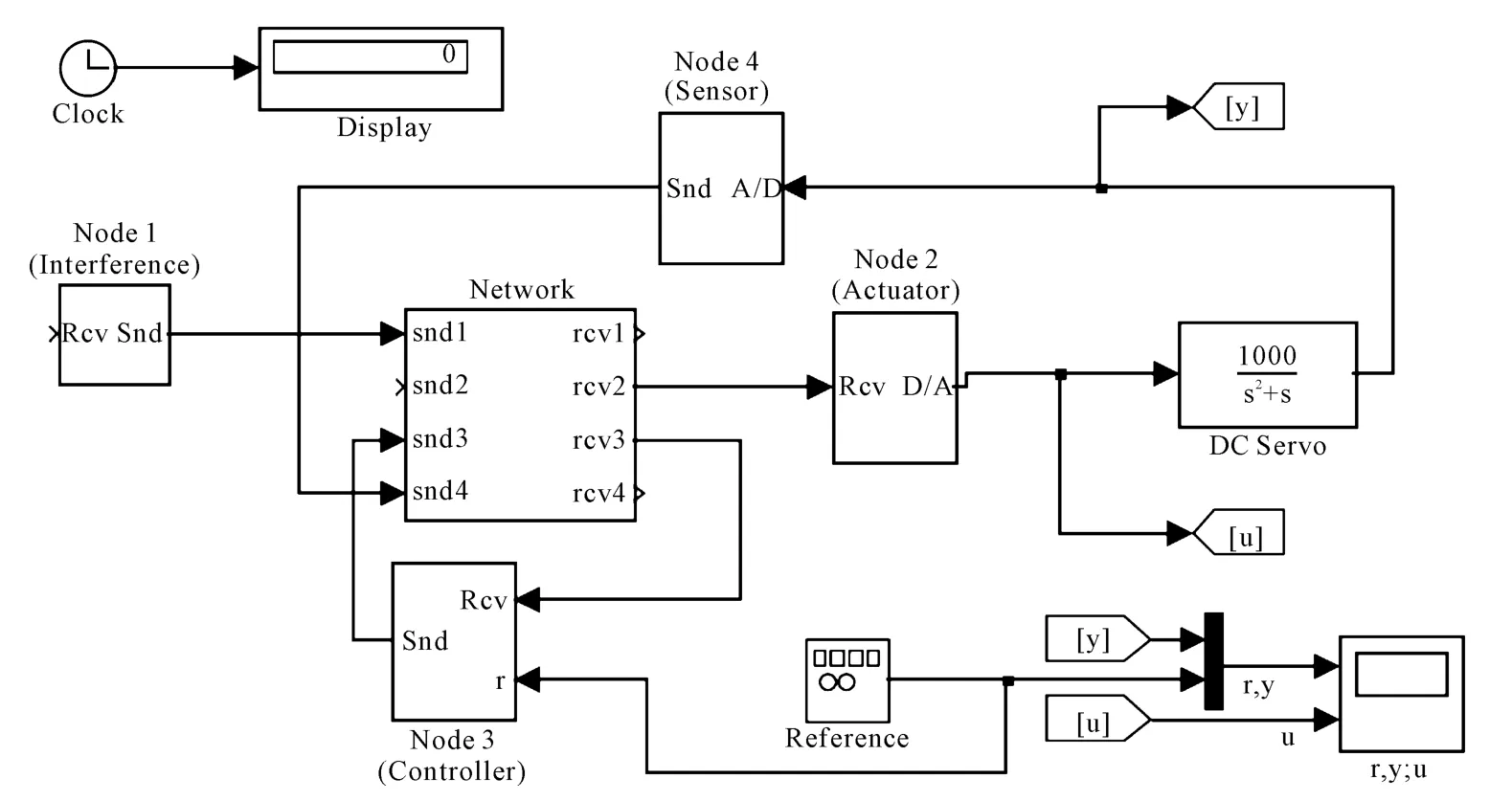
图7 基于TrueTime 的网络控制系统仿真模型Fig.7 Simulation model of network control system based on TrueTime
网络直流电机伺服过程可以用连续时间传递函数描述:

采用如下的离散PID 控制器:
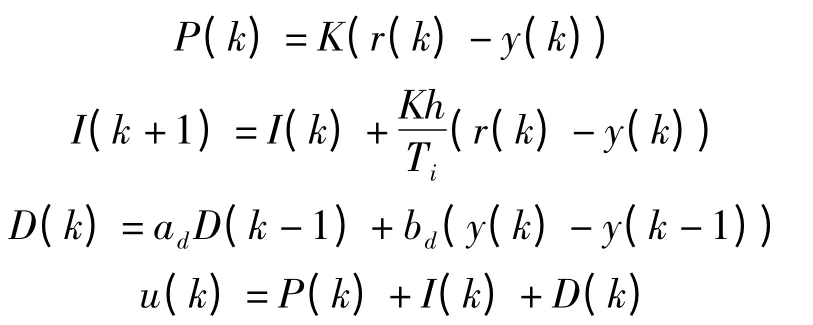
3.2 网络通信干扰对控制性能的影响
初始化程序中设置传感器为时间驱动,执行器和控制器均为事件驱动,控制器采用PID 控制。时间驱动的传感器采集被控对象的数据并发送到网络,控制器对采集的数据进行控制运算并将控制结果发送至网络,通过网络传回被控对象的执行机构。仿真模型中的干扰节点,属于高优先级任务,用于干扰网络通信。
控制器采用PD 控制,初始设定参数为:采样周期h=0.010 s;比例系数K=1.5;积分系数Td=0.035;采用RM 网络调度。有无干扰通信情况下,系统控制性能和网络调度曲线如图8 所示。调度图中峰值表示线程正在运行,中间值表示任务被抢占,最低值表示任务处于睡眠状态。从仿真结果图中,可以判定系统的可调度性,为系统性能判定提供了可靠的依据。
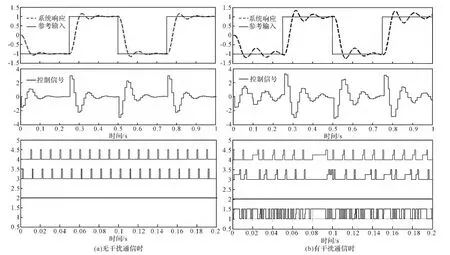
图8 网络通信干扰对控制性能的影响Fig.8 Control performance influence by interference of network communication
分析可见,在没有干扰时对象输出y 经过网络传输后,能够迅速跟踪参考输入r 的变化曲线,采用PD 控制方法可以进行快速、有效调节,系统的控制性能稳定。在控制器和通信过程中加入干扰信号,虽然系统的控制性能明显降低,但所采用的控制策略仍可以进行有效调节,此时网络调度仿真模块对干扰节点进行调度处理。因此网络调度策略决定了网络与计算机的不同执行方式,影响网络控制系统性能,需要根据系统任务特点合理设计。
3.3 网络调度对控制性能的影响
利用TrueTime 搭建网络调度控制3 台直流电机的仿真模型。三个电机的控制任务采样周期分别为0.006 s,0.005 s,0.004 s,保持仿真模型其它参数不变,分别采用RM 和EDF 调度策略,运行仿真结果和调度曲线如图9、图10 所示。
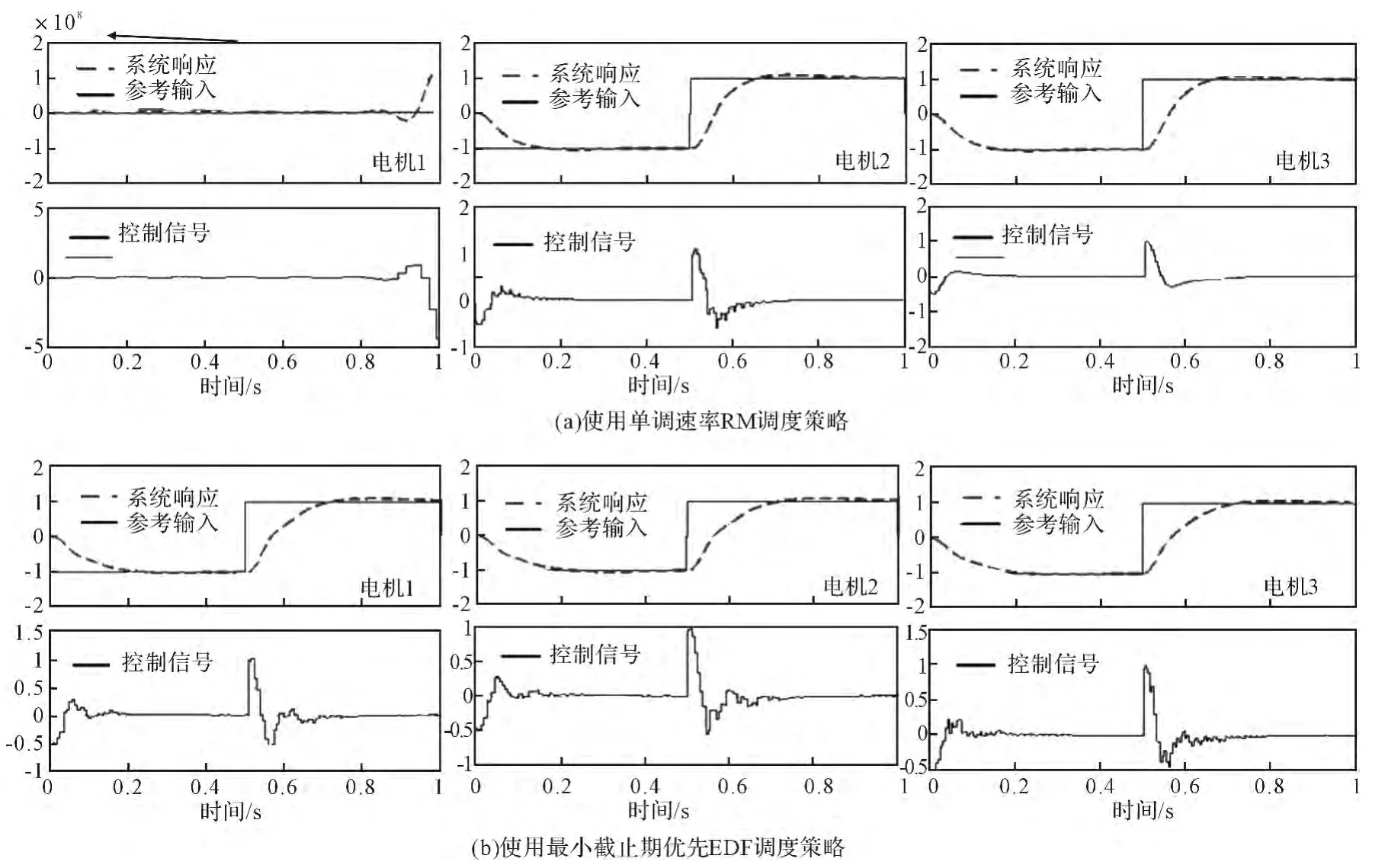
图9 RM 和EDF 调度策略对电机运行性能的对比Fig.9 Comparison of the motor operating performance using the RM and EDF scheduling strategies
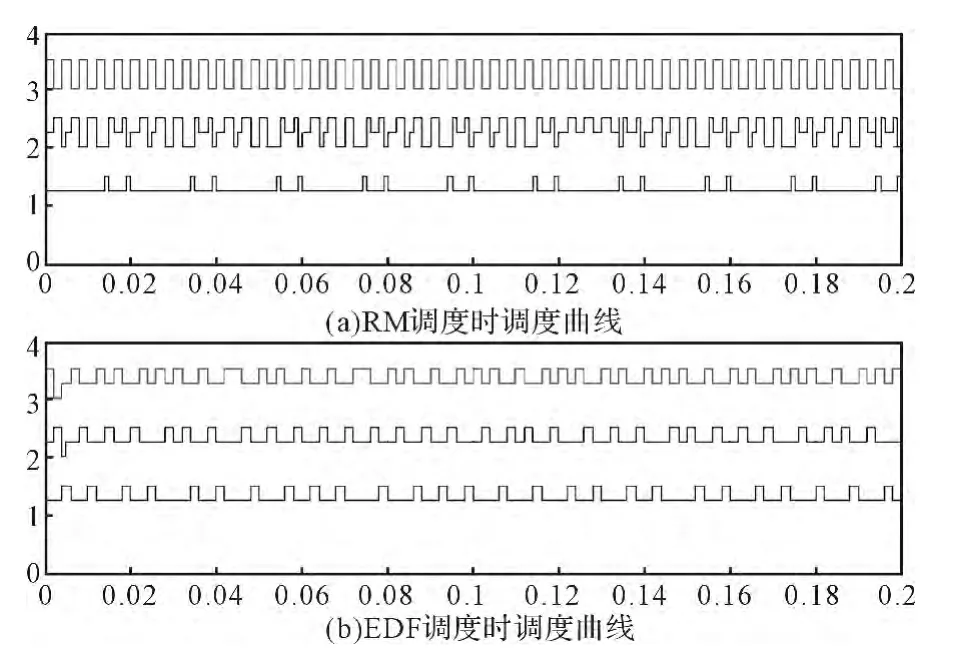
图10 RM 和EDF 调度曲线对比Fig.10 Comparison between RM and EDF scheduling curves
由图可见:采用RM 调度策略时,电机1 优先级低总被抢占,不能得到反馈信号,控制策略失效导致系统不稳定。采用EDF 策略后,根据任务距离时限要求的长度动态分配优先级,每个任务得到了合理的调度,三个电机控制性能稳定。
4 结论
论文研究了网络控制系统中网络时延、采样速率和信息传递间隔等因素对系统稳定性的影响,结合煤矿设备运行实验,使用仿真方法研究网络控制系统的性能,对煤矿分布式控制系统最佳运行参数的确定提供了参考,并得出以下结论:
(1)网络时延可以通过构建合理观测器进行补偿校正,但以传感器时间驱动为前提、采样速率和信息传递时间间隔会导致系统网络资源占用问题,严重时会影响系统稳定性,必须进行优化以获得良好的系统控制性能。
(2)在网络控制系统开发中,利用综合评价策略,分阶段采用了静态分析和动态测试方法,对确定系统最佳运行参数十分有效。
(3)网络仿真为网络通信性能提供了一个方便、高效的验证和分析方法。网络控制系统仿真平台对网络环境下控制对象、执行器、传感器和控制器等进行研究,有助于系统最佳运行参数确定,保证网络通信的实时性。
[1]孟惠霞.煤矿井下远程监控系统网络通信的研究[J].煤炭工程,2010,(07):99-101.
[2]杜大军,费敏锐,宋杨,李雪.网络控制系统的简要回顾及展望[J].仪器仪表学报,2011,(03):713-721.
[3]陈在平,岳有军.工业控制网络与现场总线技术[M].北京:机械工业出版社,2006:
[4]吴小平.基于时延补偿和广义预测控制算法的网络控制系统研究[D].武汉:武汉科技大学,2007.
[5]肖勇,张军,阎家光.煤矿监控系统中CAN 总线网络控制系统的设计与实现[J].矿业安全与环保,2008,(06):34-35 +42.
[6]傅磊,马步强,史伟,梅瑾烨.基于PROFINET 工业以太网的连铸自动化系统设计[J].重型机械,2012,(02):41-44.
[7]岳东,彭晨,Qinglong Han.网络控制系统的分析与综合[M].北京:科学出版社,2007
[8]Walsh G.C,Hong Ye,ushnell L.G.Stability analysis of networked control systems[J].IEEE Transactions on Control Systems Technology.2002,10(3):438-446.
猜你喜欢
环球时报(2020-08-11)2020-08-11
通信电源技术(2020年8期)2020-07-21
制造技术与机床(2019年8期)2019-09-03
汽车维修技师(2019年2期)2019-08-23
电子制作(2019年23期)2019-02-23
制造技术与机床(2017年9期)2017-11-27
自动化学报(2017年1期)2017-03-11
现代防御技术(2016年1期)2016-06-01
全球定位系统(2011年6期)2011-07-18