
基于摆线针轮减速作用的新型缓降设备研发
2015-04-16 07:41王文深林潘忠
机械制造 2015年6期
□ 王文深 □ 林潘忠
1.浙江工贸职业技术学院 汽车与机械工程学院 浙江温州 325003
2.温州职业技术学院 机械工程系 浙江温州 325035
近年来,城市高楼火灾频发,破坏力强且不便救援,造成了重大的人员伤亡与财产损失[1]。利用绳索从楼上平台或窗口脱身是一种较为简单易行的办法,因此各种高楼逃生装置应运而生[2-4]。20世纪80年代以来,国内外学者对高楼缓降器进行了大量研究,大致可分为阻尼式和减速盘式缓降器,阻尼式缓降器下降速度会随使用者体重增加而增大,而减速盘式缓降器结构复杂,有的还需要电机驱动或控制,操作繁琐,不利于推广。高楼缓降装置除了安全可靠外,最好能具备以下特征。
(1)下降速度能自动控制,使用时不需人工调整与干预就能适应不同体重的人,同时在保证安全的情况下,逃生的速度越快越好。
(2)对使用者无需进行专业训练,也无体力、技能方面的特殊要求,操作简便,无需他人帮助,一个人就能实现自救。
(3)结构简单,最好不要有动力装置。
针对上述要求,笔者设计了一种新型的高楼缓降装置,通过摆线针轮和液压阻尼的减速作用,使人或重物在下降0.8~1 m的过程中,完成一次下降-减速的运动过程,如此从高处到地面的长距离被分成了若干段短距离,实现分级缓降的目的。基于摆线针轮的减速作用,设计了装置结构运动曲线,在此基础上建立了整机的数值模型,用ANSYS软件对其关键部位的强度进行校核,通过样机试验,验证了装置的可行性与安全性。

▲图1 缓降装置结构简图
1 结构与原理
装置的结构示意如图1所示,由手动收线机构、绕线轮、减速机构和阻尼机构4个部分组成。
阻尼机构为液压小孔阻尼,液压缸内活塞上设有单向口和阻尼孔,油液从液压缸下腔经小孔流向上腔时受到阻尼作用,而由上腔经单向口流到下腔时不受阻尼。减速机构是由摆线针轮构成的谐波传动,其针轮的外轮廓为凸轮结构,当重物带动绕线轮旋转若干圈后,由于摆线针轮的减速作用使凸轮转动一圈。凸轮在回行程阶段,活塞杆与轮廓分离,人或重物处于下落运动状态;凸轮在推行程阶段,凸轮将液压缸活塞下压,使绕线轮的转动受到阻碍,人或重物的下降速度减慢,直到减速至零。手动收线机构由一对传动比为3∶1的齿轮组成,它可以将绳索快速收回。为了使整体机构有更好的操作性,设置了两个超越离合器的单向结构:一个安装在手动卷线机构和绕线轮之间,它的作用是手动向上卷线时,卷线机构能带动卷线轮,而向下放线时,不会因放线而带动手柄旋转,以防手柄旋转而伤人;另一个安装在绕线轮与摆线针轮之间,当向下放线时,绕线轮可以带动减速机构,而向上卷线时,不用带动减速机构以减小卷线阻力。
2 摆线针轮设计与分析
摆线针轮具有传动比大、效率高、结构紧凑等优点,近年来在机器人、数控机床和自动化设备等领域得到了广泛应用[5-6]。笔者设计的摆线针轮减速机可分为3个部分:输入轴、减速部分、输出部分,其运动简图如图2所示。当输入轴带动偏心套旋转一周时,由于摆线针轮上齿廓曲线的特点及其受针轮上针齿限制之故,摆线针轮的运动成为既有公转又有自转的平面运动,针轮于相反方向转过一个齿而得到减速,由此获得较低的输出转速。
2.1 传动比及齿形设计
按照每1 m左右减速一次的目标,绕线轮最内圈的直径为63 mm,周长约为197 mm;最外圈直径为102 mm,周长为316 mm,在确定减速比时,取其平均周长为263 mm。因此传动比i=1 000/263=3.93,取传动比为4。
使用SolidWorks三维软件对摆线针轮建模,考虑到摆线针轮齿廓曲线的复杂性,不适合采用一般的建模方法,笔者通过定义公式曲线来生成摆线针轮的齿廓曲线。在CAXA电子图板软件中选择“公式曲线”方式绘制齿廓曲线,根据设计要求对传统的齿廓曲线数学方程进行适当修改与改进,得出一种优化算法,以满足本次设计的需要。根据摆线运动规律,建立摆线方程,在直角坐标系下输入摆线针轮齿廓的曲线方程。
针轮:


▲图2 摆线针轮运动简图
摆线轮:

式中:R为摆线轮基圆直径;r为针轮的基圆半径;Za和Zb分别为针轮和摆线轮的齿数。
取针轮齿数Za=12,针轮基圆半径r=1.5 cm,传动比为4,则摆线轮的齿数Zb=9,则基圆直径R=2rZb,代入摆线方程,在CAXA中作出单个齿的摆线图线,通过阵列得到全部的齿形。输出部分为凸轮结构,为使结构紧凑,将针轮的外轮廓设计为凸轮,摆线针轮齿形和凸轮轮廓如图3所示。

▲图3 摆线针轮齿形及凸轮轮廓
2.2 摆线针轮强度计算
摆线针轮齿面的失效形式是疲劳点蚀和胶合,针轮与摆线轮轮齿的接触,可认为是两个瞬时圆柱体的接触[7],根据赫兹的接触应力公式,其接触应力δj为:

式中:Pi为任一瞬间针轮与摆线轮接触点的法向压力;Ed为接触体的当量弹性模量,摆线轮和针齿的材料均为合金钢,故Ed=200 GPa;B为摆线轮的宽度;ρd为针轮与摆线轮接触点的当量曲率半径。
轮齿在受载时,齿根所受的弯矩最大,因此齿根处的弯曲疲劳强度最弱。引用标准直齿圆柱齿轮的齿根弯曲疲劳强度校核公式,在实际计算中,还应计入齿根危险截面处的过渡圆角引起的应力集中作用以及弯曲应力以外的其它应力对齿根应力的影响,因而得齿根危险截面的弯曲强度条件为[8]:

式中:[δf]为许用弯曲疲劳应力;m为齿轮模数,摆线针轮模数较直齿齿轮要大很多,需根据实际设计来取[9];K 为载荷系数, 一般取为 1.98;Ft为轮齿所受切向力;YFa为齿形系数,一般取YFa=2.44;YSa为载荷作用于齿顶时的应力校正系数,一般取YSa=1.65。
3 有限元模型的建立与分析
3.1 数值模型与网格划分
本文利用SolidWorks对缓降器进行几何建模,然后导入HyperMesh中划分网格,建立有限元模型,采用ANSYS进行分析计算,模型中一些细小的特征对结构的应力影响较小,如过渡圆角、边缘倒角等,在保证分析可靠性的前提下,可以忽略这些微小特征。
网格导入HyperMesh软件中划分,HyperMesh是一款高效的有限元前处理软件,它可以快速高效创建有限元网格,极大地提高了有限元前处理效率。本文选用四面体Solid187网格单元进行划分,为了较好地反映应力变化规律,对摆线针轮和活塞杆处采用比较密集的网格,网格总数为863 242个,整机有限元模型如图4所示。其中,底板、侧板、绕线轮和摆线针轮的材料参数为:弹性模量E=206 GPa, 泊松比 μ=0.3, 密度 ρ=7.8×103kg/m3; 液压缸的材料参数为:弹性模量E=69 GPa,泊松比 μ=0.33,密度 ρ=2.9×103kg/m3。
3.2 结果分析
将由HyperMesh中得到的缓降器有限元模型导入到ANSYS分析软件中,定义分析类型为结构动力学分析,添加底板固定约束,计算整机在最大负载为200 kg作用下摆线针轮和其它结构处的受力情况。
图5和图6显示了摆线针轮在负载作用下的等效应力云图,从图中可以看出,齿面接触应力最大值出现在两齿廓的接触点处,且摆线轮处的最大应力比针轮要大,两者都小于材料的最大许用应力,所以该齿轮在齿根弯曲强度的范围之内,满足强度要求。
图7显示了右支撑板上的应力分布云图,右支撑板上的最大等效应力发生在底脚处,这主要是由于重物下降时对支撑板产生的弯矩作用,使得支撑板与底板接触处的应力最大。

▲图5 针轮等效应力云图

▲图4 有限元模型
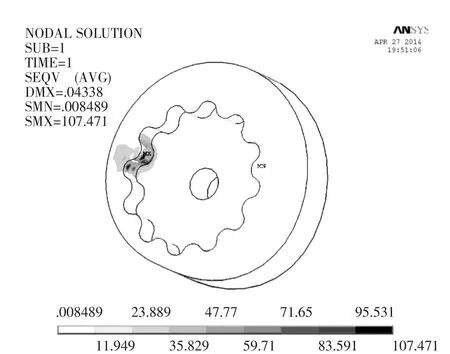
▲图6 摆线轮等效应力云图

▲图7 右支撑板等效应力云图

▲图8 缓降器实物图
通过对缓降器关键部位及整机的应力情况进行有限元分析,指出最大应力所在位置,并在后续设计中加强改进结构设计,增加装置的可靠性与安全性。
4 实验
为了验证装置的可靠性,对所制作的实物样机进行现场实验。缓降器实物如图8所示,分别对15 kg重物、40 kg重物和64 kg的真人进行测试,缓降器安装在三楼即6.5 m高度处,测试不同负载时的下降时间及平均速度,结果见表1。

表1 不同负载时缓降器运动规律
分析表1可知,本缓降器可适应不同重物的下降,且每段下降高度与重量无关,在各段降落过程中实现加速-减速至零的功能。随着重量的增加,其下降平均速度也逐渐增加,这主要是由于负载加大时,凸轮对活塞杆的作用力增大,活塞运动速度增加。因此随着负载增大,下降时间越短,但差别不大。
5 结束语
(1)通过合理设计,利用机械结构实现了像消防战士一样的分级下降的运动方式,下降速度快,其效果与受过专业训练的人员相似。
(2)利用摆线针轮的谐波传动进行减速,结构紧凑,轮齿的弯曲疲劳强度高,啮合重合度高,大大提高了承载能力,增加了使用时的安全性。
(3)在结构上,采用液压毛细小孔进行阻尼,使这一装置无需人工干预,不需调整,并实现对不同重量的自动适应。
本文所述高楼缓降器利用了液压油流动的阻尼作用,产生反作用力来控制人体下降的速度,能够实现分级缓降的目的,属于公共场所固定安装式逃生设备,获得国家相关专利。该装置结构紧凑,安全可靠,为缓降器的设计与发展提供了一种新的思路和参考价值。
[1] 陈远超,沈孟锋,费凯,等.自适应电磁阻尼式高楼逃生缓降器设计[J].机械制造,2012,50(6):6-8.
[2] 兰自勉,钟清.一种逃生液压缓降器的设计[J].液压与气动,2011(12):7-8.
[3] 王兴东,钟升,王强,等.往复式液压缓降装置的动态特性仿真研究[J].机床与液压,2013,41(1):142-145.
[4] Zhang Z,Liu X.Design of an Intermittent Escape Apparatus Used in High-rise Buildings Based on Escapement Mechanism [C].2011 IEEE International Conference on Mechatronic Science,Electric Engineering and Computer(MEC2011),Jilin,China,2011.
[5] Gorla C,Davoli P,Rosa F,et al.Theoretical and Experimental Analysis of a Cycloidal Speed Reducer [J].Journal of Mechanical Design,2008,130(11):35-39.
[6] Hwang Y W, Hsieh C F.Geometric Design Using Hypotrochoid and Nonundercutting Conditions for an Internal Cycloidal Gear[J].Journal of Mechanical Design,2007,129(4):413-420.
[7] 孙宇,朱俊平,西庆坤.农业机械中的摆线轮齿廓强度有限元分析[J].农机化研究,2008(4):25-28.
[8] 张占东,姚伟德.基于ANSYS的直齿圆柱齿轮精确建模与应力分析[J].机械工程与自动化,2012(6):71-73.
[9] 李充宁,孙涛.2K—V型行星传动中摆线针轮啮合的传动精度研究[J].机械工程学报,2001,37(4):61-65.
猜你喜欢
化工设计(2022年2期)2023-01-04
设备管理与维修(2022年21期)2022-12-28
汽车实用技术(2021年23期)2022-01-05
防爆电机(2021年1期)2021-03-29
防爆电机(2020年6期)2020-12-14
制造技术与机床(2019年11期)2019-12-04
重型机械(2019年3期)2019-08-27
制造技术与机床(2017年3期)2017-06-23
电子制作(2017年20期)2017-04-26
锻压装备与制造技术(2016年3期)2016-06-05
