六自由度液压伺服运动系统研究
2015-05-10 07:49肖志坚廖峰
机床与液压 2015年4期
肖志坚,廖峰
(中国民航飞行学院模拟中心,四川广汉618307)
飞行模拟机是一个复杂的实时仿真系统,它能够模拟飞机的各种飞行状态,给飞行员提供逼真的视觉、听觉、动感和力感。飞行模拟器液压伺服运动系统是一个六自由度运动平台,它能够作绕空间坐标3 个轴的俯仰、横滚、偏航角运动和沿3 轴的升降、横移、纵移直线运动[1-4]。平台有6 套独立的液压伺服系统,计算机通过控制6个作动筒的伸缩,来实现运动平台在6 个自由度上的运动[5-6]。
1 六自由度运动系统结构
六自由度运动系统主要包括以下部分:万向铰链下支座、液压作动筒、储能器、万向铰链上支座、油源、控制电缆以及运动控制计算机[7],其中的运行系统基座框图如图1所示。

图1 运行系统基座框图
1.1 万向铰链支座组件
每一个万向铰链上、下支座组件包括两个接头,它与运动平台的底部或地面相连,平台可以在最大偏移包线内自由运动,而没有任何机械阻碍。万向铰链上支座接头的主轴和辅助轴上装有楔形的滚珠轴承,万向铰链下支座接头的主轴和辅助轴上装有滚柱轴承,所有的轴承都被调整到在指定负载情况下可无间隙地转动。
1.2 伺服作动筒组件
运动伺服作动筒是一个活塞杆以及活塞上带有静压轴承的不对称液缸,6 个作动筒控制整个运动平台6 个自由度的运行。其中液压作动筒的设计比较特别,它包括液压缸、液压管、电液伺服阀、溢流阀、单向阀、节流阀以及位移传感器[8]。
1.3 油源
油源被设计为一个完整独立的分系统,包括运动及油冷却所需的泵、驱动电机、控制装置、油箱、相关设备以及阀门。运动泵由一台110 kW 的电机驱动,泵容量可变并进行压力补偿。在系统压力为19 MPa 时,系统最大流量可调节到将近422 L/min,连续流量为292 L/min。泵的最小额定工作压力为25 MPa。运动泵从油箱中吸油。油箱的入口和出口被隔开,以更好地散热。高压储能器直接安装在油源上。正常工作时,泵、控制阀或者其他的液压系统组成部分不会发生气穴现象,阀门也不会震颤。在具体工程中,油源的流量和压力根据需要发生改变。
2 伺服作动筒液压控制原理
伺服作动筒液压控制原理图如图2所示,伺服作动筒与系统压力油管相连的上室是导通的。油由下室F 流入流出,由电液换向阀控制。当进油液输入压力大于12.2 MPa 时,若电液换向阀5 不工作,此时该换向阀处于常开位,液压油通过节流阀6 直接回油箱;若在计算机控制下,换向阀3、4 工作,电液换向阀A 工作,当AP、BT 位连通时,液压油通过点M进入作动筒下室F,此时作动筒伸长;当AT、BP 位连通时,作动筒下室F 形成负压,油箱里的液压油通过节流阀6 回油,此时作动筒伸出部分回缩。
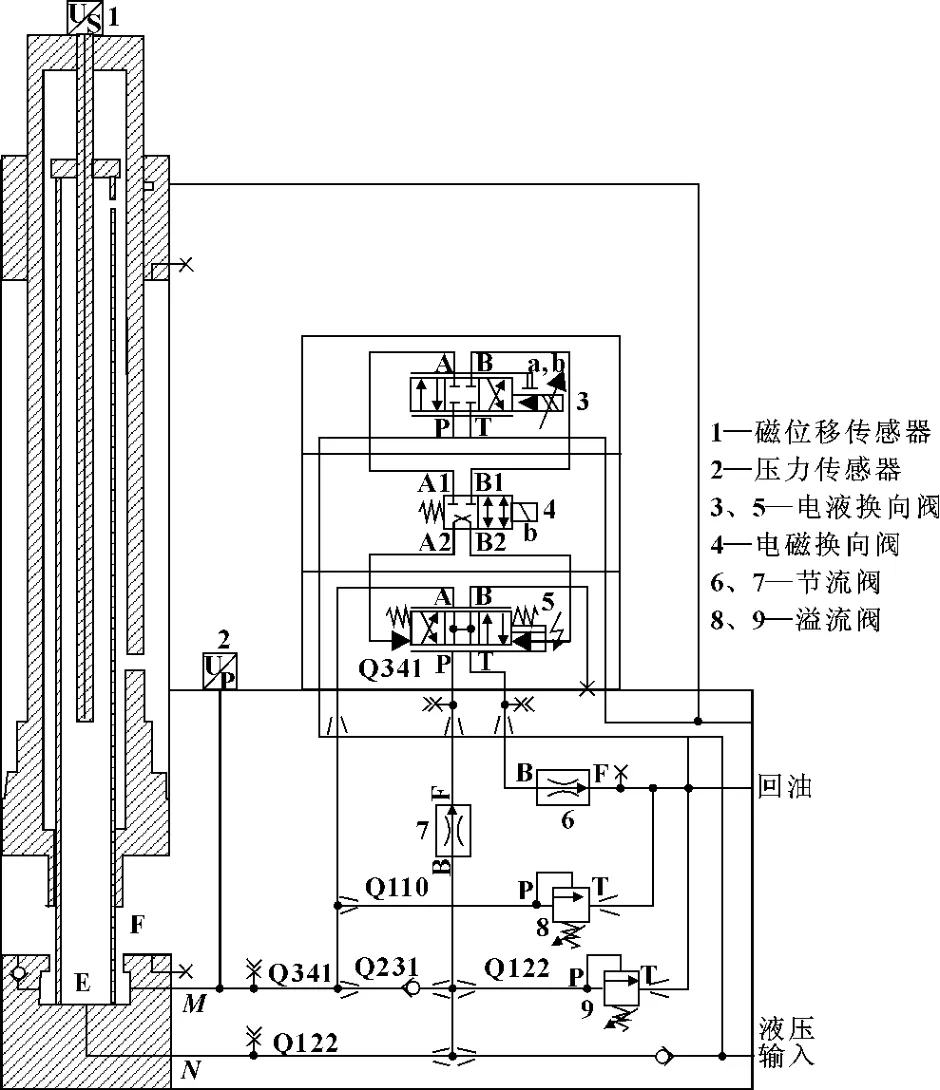
图2 伺服作动筒液压控制图
在作动筒伸出和缩回两种偏移极限时,作动筒有75 mm 的缓冲行程。在整个作动筒油路控制上,包括带有故障显示功能的电液伺服阀、溢流阀、单向阀、节流阀等组件。活塞的上下速度由硬件限制到0.688 m/s,以防止缓冲过程中过载。
作动筒内部顶端固定着一个磁位移传感器,传感器的电缆从作动筒活塞杆的上端连接传感器电路盒。运动伺服作动筒装有压力传感器以测量作动筒底部的压力,该压力信号作为安全信号以及作为控制系统的反馈信号。作动筒还安装了一个微型限位开关来检测活塞杆的完全缩进位置。在作动筒边上装有连接器,用于伺服阀、压力传感器和位移传感器的电缆铺设。
3 作动筒伺服控制原理与安全保护
3.1 作动筒伺服控制原理
作动筒伺服控制工作原理如图3所示:飞行模拟机主计算机通过采集飞行操纵等参数,计算出3 个方向的轴向线加速度、角速度、角加速度及3 个姿态角等数据,经过浮点运算等一系列复杂的变换,通过滤波得到能够反映飞行员在飞机座椅上产生的力及其他动感信号作为伺服作动筒的运动驱动信号,驱动信号再经过D/A 转换变成模拟信号输入至作动筒液压伺服回路,在回路中,信号经过隔离放大、前置滤波、伺服放大后控制电液伺服阀门的开关量,从而控制液压油的进出量,最终达到控制作动筒的伸缩量。同时,作动筒内的传感器也会提供压力及位置反馈信号,结合控制信号,共同控制电液伺服阀以使作动筒到达精确的位置。
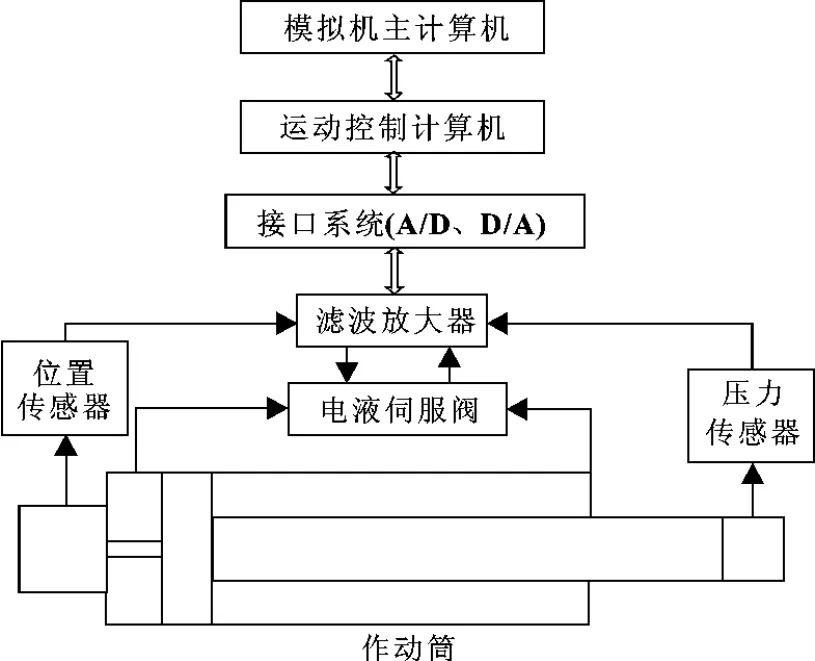
图3 作动筒伺服控制图
3.2 作动筒安全保护机制
(1)位置检测及保护
作动筒数字控制系统以位置控制为基础,当模拟机运动系统工作时,运动控制计算机通过磁位移传感器实时采集作动筒的位置信号,然后将作动筒位置反馈给运动计算机;计算机把作动筒位置的给定值和实际值进行比较,并将差值发送给控制阀,由控制阀来调节油量的进出多少。在作动筒运动的临界位置安装了一个微型限位开关来检测活塞杆的完全缩进位置,一旦超过最大行程,将触发限位开关,运动系统立即启动安全保护,中断作动筒运行,并将运动平台缓慢放下。
(2)压力检测及保护
当模拟机运动系统工作时,运动控制计算机采集作动筒压力传感器信号,当检测到压力传感器超过最大压力范围时,计算机触发报警系统,运动系统立即启动安全保护,运动泵停止工作,作动筒泄压,中断作动筒运行,并将运动平台放下。另外,液压控制系统内装有压力安全阀以防超压,运动泵的出口处也装有一个安全阀,由电磁线圈控制,若压力传感器损坏,一旦超压,压力安全阀会自动泄压,以保障系统安全运行。
4 结束语
6 自由度液压伺服运动系统是飞行模拟机的关键部件,计算机通过对6 个液压伺服作动筒的控制来实现飞机俯仰、横滚、偏航、升降、纵向平移和侧向平移的6 自由度运动仿真。文中对液压伺服作动筒的工作和控制原理进行了详细分析,对6 自由度运动系统的开发和应用具有一定的指导意义。
[1]颜旗权.6 自由度飞行模拟器的研究[D].哈尔滨:哈尔滨工程大学,2008.
[2]陈又军.现代飞行模拟机技术发展概述[J].中国民航飞行学院学报,2011,22(2):25-27.
[3]吴东苏.飞行模拟器运动平台关节空间自适应模糊控制[J].南京航空航天大学学报,2008,40(5):670-676.
[4]高峰.六自由度运动平台伺服系统研究[D].武汉:华中科技大学,2004.
[5]廖峰.六自由度伺服作动筒及安全保护的研究[J].液压与气动,2009(12):38-40.
[6]王辉,陈学森.飞行模拟器六自由度运动平台的仿真研究[J].机械科学与技术,2012,31(5):778-782.
[7]肖志坚.CJ1 飞行模拟器运动系统与故障分析[J].机电技术,2013,36(5):8-12.
[8]YNTEMA R.6 DOF Motion System HSE-6-MS-60-C-5/D[M].Netherlands.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
现代制造技术与装备(2021年5期)2021-07-02
科学技术创新(2021年11期)2021-05-25
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
弹箭与制导学报(2020年4期)2020-09-17
航空发动机(2018年6期)2018-03-23
电子制作(2016年19期)2016-08-24
专用汽车(2016年4期)2016-03-01
液压与气动(2015年6期)2015-04-16