WiFi 指纹定位中的楼层辨识方法研究
2015-05-27 13:18艾浩军李泰舟王玙璠
武汉理工大学学报(信息与管理工程版) 2015年3期
艾浩军,李泰舟,王玙璠,2
(1.武汉大学 计算机学院,湖北 武汉430072;2.武汉大学 国家多媒体软件工程技术研究中心,湖北 武汉430072)
WiFi 在室内环境的广泛部署,以及具备WiFi通信能力的终端设备特别是智能手机的普及,使得WiFi 具有作为主要定位介质的优势。WiFi 指纹定位算法在精度与计算复杂度等方面明显优于时间到达类方法(AOT)[1-2]。LEPPAKOSKI 等[3]提出了一种行人导航系统,结合WiFi 指纹和惯性传感器,利用地图中室内环境障碍物的位置信息,限制粒子滤波器中粒子的活动空间,其最大定位误差为3 m。谢波等[4]提出个人导航融合建筑平面信息的方法,以及融合鞋式IMU 和楼层平面图的导航方案,引入卡尔曼滤波加粒子滤波的级联框架,进行零速修正并融入非线性地图匹配技术,使该系统能达到较高的精度,行程在300 m 左右时的误差不超过0.3 m。
高层建筑的结构和WiFi 信号的有限传播能力有利于设计分区域的室内定位方案,准确的楼层判断可以有效减少匹配阶段的搜索空间,从而提高定位精度并降低运算开销。室内的开放空间(如天井)和连通区域(如楼梯),由于WiFi 信号在空间的自由传播及多径传播效应,不同楼层的部分区域WiFi 信号特征相近,导致定位误差较大。国内外学者对室内定位中楼层辨识问题做了大量研究。ALEX 等[5]提出了一种基于GSM 指纹的楼层判别方法,并研究不同的方法在保证较高判别正确率的情况下有效地减少指纹采集量,所研制的SkyLoc 系统楼层判定结果在73%的情况下正确,误差在两层以内的概率达到95%。邓中亮等[6]提出一种基于K -means 算法的WLAN室内定位楼层判别方法,预先采集指纹并进行分类,判别时先根据每个访问接入点(access point ,AP)的最大、最小值进行粗分类,当判定结果出现多个楼层时,再计算出距离最近的一类,将其所属楼层作为最终判定结果,其正确率超过95%。孙子砚等提出WSN 辅助的室内无缝切换方法[7],通过在楼梯等过渡区域另外布设WSN 节点,与WLAN 定位系统结合,实现无缝切换,该方法的切换成功率大于75%,切换时延最大值为2 s。在无需基础设施的楼层辨识方法中,Ftrack 系统[8]集成了一种极具代表性的楼层切换方法,只依靠手机内置的加速度传感器,捕捉用户上下楼和乘坐电梯的状态,在对某个建筑没有任何先验知识的条件下,通过Grouping-Merging 算法经过2 h 学习即能达到90% 的准确率,3 h 后准确率能达到97%。然而,该方法依赖用户的相遇来学习,在人流量较少的情况下,学习效率及判别精度会出现不同程度的下降。
笔者提出了一种室内定位系统中的楼层辨识方法,包含楼层判别和楼层变化检测两个方面。针对楼层判别,笔者提出了信号强度加权K 近邻算法和神经网络方法,针对楼层变化检测,利用智能终端MEMS 传感器,提出了适应用户不同移动方式的融合感知方法。由此实现在定位过程楼层辨识中降低运算开销,提高定位精度的目标。
1 室内定位中楼层辨识问题描述
WiFi 指纹定位系统包含离线建模和在线定位两个阶段,在离线建模阶段,除了构建指纹数据库外,还应对指纹进一步处理,完成楼层辨识的相关建模,包含楼层辨识方法的WiFi 指纹定位流程如图1 所示。
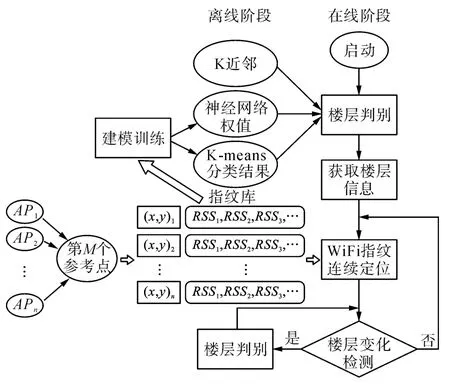
图1 包含楼层辨识方法的WiFi 指纹定位流程图
定位系统启动后,首先采取基于K 近邻或者神经网络的方法快速判断楼层,根据初始化的楼层信息,加载相应楼层的指纹库等相关数据,初始化时默认未检测到楼层变化。WiFi 指纹在连续定位的同时,智能终端也在采集气压计和加速度计的数据,用以分析用户行为,当检测到用户正在搭乘电梯或者上下楼梯时,即检测到楼层有变化的可能性,之后系统将一直进行楼层判别,直到未检测到楼层变化。
2 楼层判别方法
2.1 基于K 近邻算法的楼层判别方法
令Dn={x1,x2,…,xn},其中每个样本xi所属的类别均已知。对于测试样本点x,在集合Dn中距离其最近的点记为x'。“最近邻规则”的分类方法是将点x分为x'所属的类别,推广后的“K近邻规则”是将一个测试数据点x分类为与其最接近的k个近邻中出现最多的那个类别[9]。
在室内环境中,由于墙壁、玻璃等物体的阻隔及距离损耗,一般情况下,AP 的信号强度在不同楼层有明显的区别,因此笔者提出了一种基于信号强度加权的K 近邻判别方法。首先对每一层楼定义一个集合Fi= {AP1,AP2,…,APmi,fi},(i=1,2,…,n),其中n为总楼层数,fi为楼层的编号,mi为第fi层的AP个数。假设按降序排列的前k个信号强度值为(RSS1,RSS2,…,RSSk),其对应着k个AP和l(l≤k)个楼层。考虑到信号越强,则与某个AP距离越近,故引入每个AP的信号强度与信号强度最大值的比值作为权值。

由于RSS值均为负数,因而信号强度越小,其权值越小,最终取最大score值所对应的楼层号为判定结果。
2.2 基于神经网络的楼层判别方法
笔者采取的BP 神经网络设计思路是以每层楼所有参考点采集到的WiFi 信号强度作为样本,通过预处理,将提取的信号特征输入神经网络的训练网络。输入矩阵S和输出矩阵T分别为:
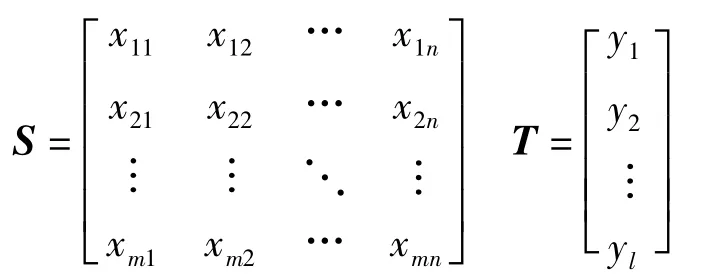
式中:xij为WiFi 信号强度值;i为第i个AP;j为第j个参考点;yk为楼层判定结果;l、m、n分别为楼层数、AP个数和参考点个数,取l=2,m=51 ,n=301,因此,输入神经元51 个,输出神经元两个。隐节点数量少会导致网络学习信息能力差,隐节点数量多会导致缺乏记忆主要信息的能力,混入大量非规律性的次要信息。隐层节点的个数由训练的样本数、噪声等多方面的信息综合确定[10]。因此,隐层神经元个数一般取经验公式:

式中:p为隐层神经元个数,取值为10;a为修正常数。训练学习后得到一系列的权值。当判定楼层时,根据实时WiFi 信号强度,将其输入到训练好的神经网络中,即可得到楼层的判定结果。
3 楼层变化检测
3.1 基于敏感区域的WiFi 指纹方法
预先根据AP 在楼层中部署情况和楼层空间信息,划定楼层的敏感区域,一般为楼梯或电梯附近,如图2 所示。在连续WiFi 指纹定位中,通过判断是否进入敏感区域作为执行楼层判别的条件。当定位结果出现在该区域,即检测到楼层有变化趋势,便开始判别;否则不进行楼层判别。
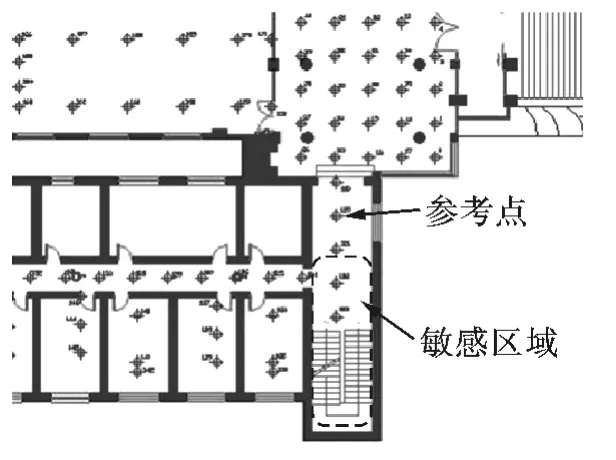
图2 敏感区域示意图
该算法依赖于定位结果的鲁棒性,当定位出现较大偏差,会导致楼层变化检测失败,从而无法判别,且应用场景局限于楼梯场景。而在电梯场景下,由于电梯是一个时刻在密闭与开放状态间切换的移动小空间,指纹特征不明显,即使将电梯周围区域定义为敏感区域也可能在楼层未发生变化时出现错判的情况。如图3 所示,以K 近邻算法为例,无论是楼梯还是电梯区域,当扩大敏感区时,检测的成功率提高了,错判率也随之提高。
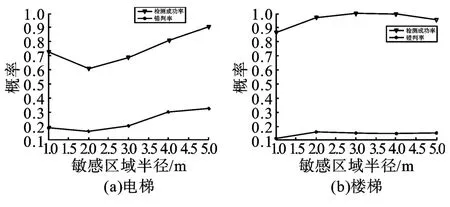
图3 检测成功率、错判率随敏感区域半径的变化趋势
3.2 基于气压计的方法
智能手机内置的气压传感器,能测量出当前大气压强,尽管大气压强受空气密度、温度和海拔高度的影响,但仍可以利用大气压强来感知待定位目标在垂直方向上的位置变化。图4 为手持小米2 和Nexus5 乘坐电梯上升过程中气压及海拔高度变化,可以看出由于不同的设备其传感器不同测量值差别较大,但高度与大气压的变化在高度变化区间内有近似线性关系。
两种设备测出的绝对海拔相差较大,相对高程变化值分别为35.1 m 和32.6 m,气压平均变化分别为10.8 Pa/m 和11.9 Pa/m。据此,笔者提出了一种基于气压差的楼层切换方法。
定义滑动窗气压差ΔPt= |Pt-Pt-τ|,其中τ 为观测时间差;ΔFt为时刻t的楼层变化状态,ΔFt=0表示楼层没有发生变化;气压差变化的上、下限值分别为Thup和Thdown。楼层变化检测规则为:当ΔPt<Thdown时,ΔFt=0;当Thup<ΔPt<Thdown时,ΔFt=ΔFt-1;当ΔPt>Thup时,ΔFt=1。如何选择合适的观测时间差τ 和气压差变化的上限值Thup和下限值Thdown,直接影响到检测结果。
在电梯场景下,运动规律简单,速度稳定,一般比人移动的速度快,阈值和滑动窗长易找到合适的参数,针对图4 的情况,取τ =2.5 s,Thup=7 Pa,Thdown=3 Pa,检测正确率可达到100%。
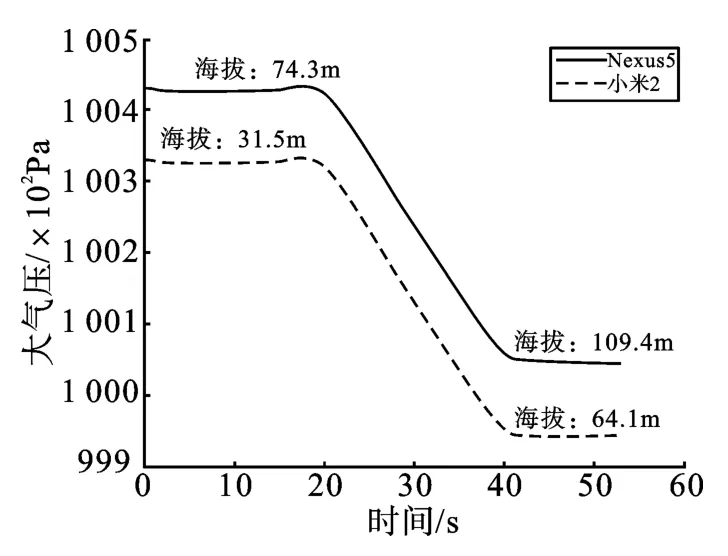
图4 手持不同设备乘坐电梯的气压变化
对于楼梯场景,人的运动方式较为复杂,在不同运动速度下气压测量值的变化规律,如图5 所示,分为快速、中速和慢速3 种情况,确定参数集都是非常困难的。
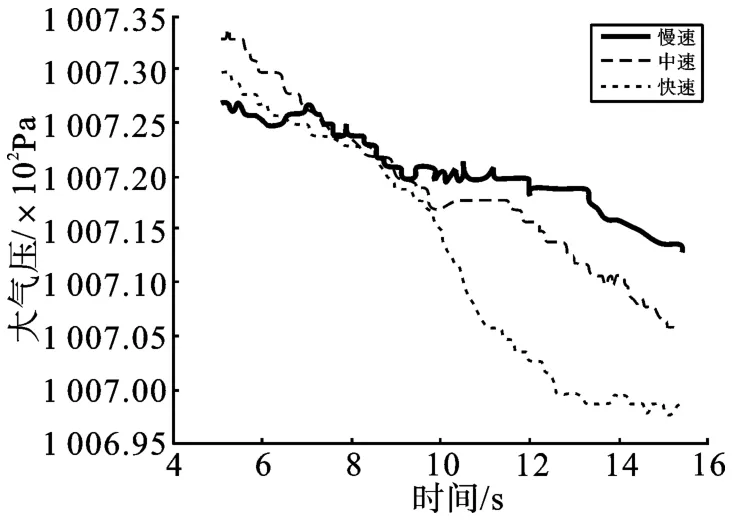
图5 快速、中速和慢速上楼梯时的气压变化
为此,可以考虑利用步态信息结合气压变化值,作为楼层变化检测的依据。
3.3 融合气压计和惯性传感器的方法
利用三轴加速度传感器,计算三轴加速度的总加速度:
然后对用户做步态检测[11-14],判断处于静止还是移动状态,同时统计步数,然后利用气压计探测气压变化,根据一定步数内的气压差,进一步辨别是否有楼层变化的趋势。
据此得出基于融合气压计和惯性传感器的检测方法流程(如图6 所示),与基于气压计的方法类似,只是滑动窗口关注的不再是固定时间内的气压变化。
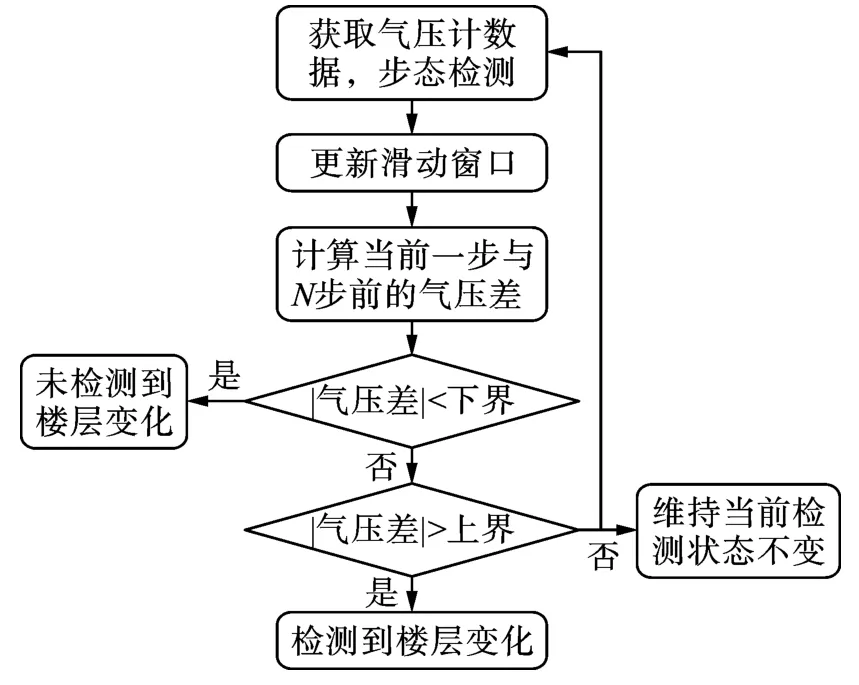
图6 基于气压计与惯性传感器融合的检测方法
融合气压计与加速度计能较好解决不同速度下的楼层变化检测问题,其观测对象已不是一定时间内气压的变化,而是一定步数内的气压变化,取N=5,因此只与移动的距离有关,而与移动的速度无关。由于该方法主要解决楼梯场景下不同速度的楼层变化检测问题,实际应用中,应与基于气压计的方法同时使用。图7 和图8 分别是在上一层楼的过程中两种方法观测气压的变化情况。
根据以上设定的阈值上界7 Pa 和下界3 Pa,在慢速上楼的过程中,基于气压计的方法未能成功检测到楼层变化,而使用气压计和加速度计融合的方法,几乎整个过程都能检测到楼层变化,从而保证了楼层判定的进行,在29 步后气压变化小于下界,未能检测到楼层变化,与此时已经完成上楼相吻合。
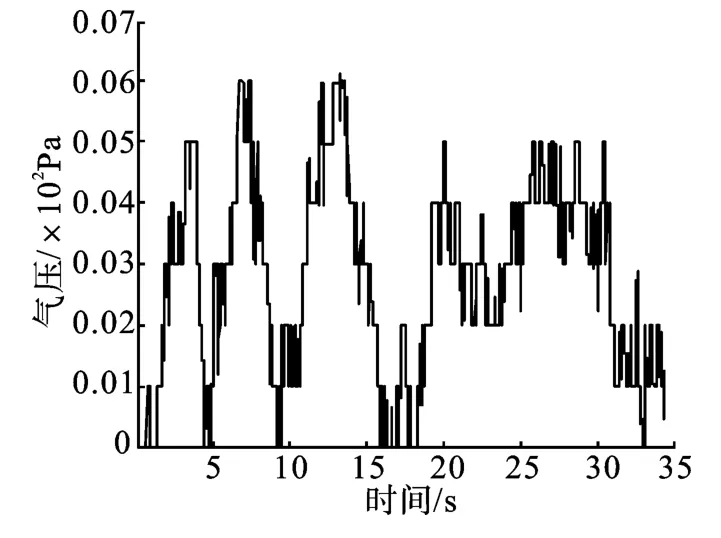
图7 基于气压计的方法观测结果
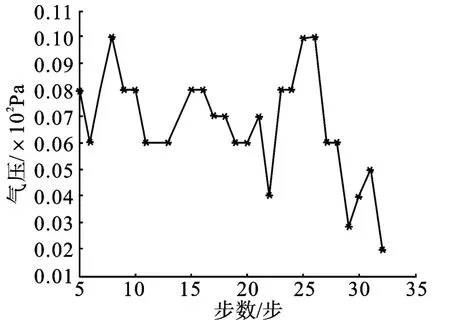
图8 气压计和加速度计融合的方法观测结果
4 实验结果及分析
实验环境为武汉大学测绘遥感国家重点实验室,共4 层楼,其中2 楼和3 楼有一部分是天井区域。整栋楼有51 个AP 覆盖,2 楼和3 楼部署有29个AP,共设置301 个参考点,平均间隔2 m,实验设备为Nexus5 智能手机,WiFi 信号的采样频率为2 Hz,气压计和加速度计的采样频率为100 Hz。
将楼层判别的性能分为3 部分评价:初始化楼层的正确率、楼层变化时的判别正确率和楼层未变化时的判别正确率。图9 为实验地点平面图,2 楼和3 楼的AP 位置均已标出。
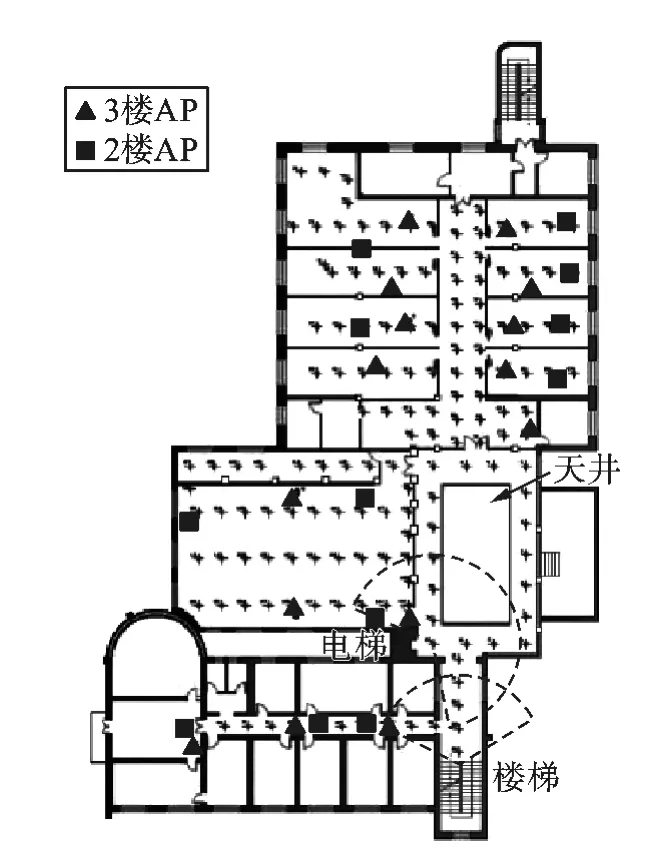
图9 实验地点平面图
笔者提出的方法对于楼层未变化时的判别率有显著提高,几乎不会出现错判的情况,将判别率提高到接近100%,这对于某些易出现错判的区域有重要意义。表1 以2 楼楼梯和电梯附近区域为例说明该方法的有效性。
表1 中,电梯附近区域的判别率明显低于楼梯附近的判别率,主要因为3 楼的AP 信号能不受到墙壁阻隔进入2 楼区域,同时AP 密度比2楼稍大,使得2 楼该区域易判别成3 楼。然而使用笔者提出的检测方法之后,当行人进入到这一区域却没有楼层变化趋势时,不会出现因错判而导致切换的情况。
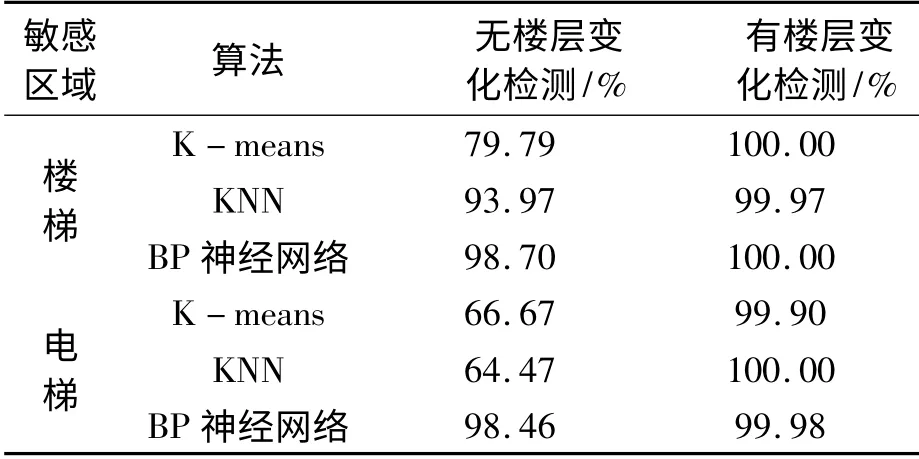
表1 2 楼楼梯和电梯附近区域判别率比较
对楼层发生变化的情形,笔者提出的楼层变化检测方法在电梯场景下正确率为100%,楼梯场景下正确率为97%左右,当楼层变化检测失败时,会导致楼层辨识成功率下降。但由于楼层可能发生变化的区域相对于楼层不会变化的区域要小很多,对判别率影响并不大。加之减少了楼层未变化时的错判率,3 种方法的整体判别率分别提升了1.645%、1.560%和0.170%。
5 结论
笔者提出的智能楼层辨识方法,以WiFi 指纹定位系统为基础,融合智能手机气压计和加速度计,显著降低了楼层未发生变化时的误判率,同时保证了在97%以上的情况下能够正确地检测到楼层变化。所提出的基于KNN 和神经网络的楼层判别方法,可使楼层判别正确率提高到99%。
[1]AHMAD U,GAVRILOV A V,LEE S,et al.A modular classification model for received signal strength based location systems[J].Neurocomputing,2008(71):2657-2669.
[2]唐文胜,李姗,匡旺秋. RF 室内定位指纹库空间相关生成算法[J].计算机工程与应用,2008,44(23):226 -229.
[3]LEPPAKOSKI H,COLLIN J,TAKALA J.Pedestrian navigation based on inertial sensors,indoor map,and WLAN signals[J].Journal of Signal Processing Systems,2013,71(3):287-296.
[4]谢波,江一夫,严恭敏,等.个人导航融合建筑平面信息的粒子滤波方法[J]. 中国惯性技术学报,2013,21(1):1 -6.
[5]ALEX V,ANTHNY L M,JEFFREY H,et al.The skyloc floor localization system[C]//Proceedings of the Fifth Annual IEEE International Conference on Pervasive Computing and Communications.[S.1.]:[s.n],2012:125 -134.
[6]邓中亮,王文杰,徐连明. 一种基于K -means 算法的WLAN 室内定位楼层判别方法[J]. 软件,2012,33(12):114 -117.
[7]孙子砚,邓中亮. WSN 辅助的室内无缝切换系统[DB/OL].[2014 - 11 - 04]. http://www. paper.edu.cn/releasepaper/content/201202 -846.
[8]YE H B,GU T,ZHU X R,et al.Ftrack:infrastructurefree floor localization via mobile phone sensing[C]//IEEE International Conference on Pervasive Computing and Communications.Lugano:[s.n],2012:2-10.
[9]RICHARD O D,PETER E H ,DAVID G S. Pattern classification[M]. Beijing:China Machine Press,2005:146 -150.
[10]SEDIGHI A,VAFADUST M.A new and robust method for character segmentation and recognition in license plate images[J].Expert Systems with Applications,2011,38(11):13497 -13504.
[11]CONSTANDACHE I,BAB X,AZIZYAN M,et al.Did you see bob:human localization using mobile phones[C]// Proceedings of the 16th Annual International Conference on Mobile Computing and Networking.[S.l.]:ACM,2010:10 -15.
[12]CONSTANDACHE I,CHOUDHURY R,RHEE I.Towards mobile phone localization without war-driving[C]// INFOCOM,IEEE.[S.l.]:[s.n],2010:128-131.
[13]陈伟.基于GPS 和自包含传感器的行人室内外无缝定位算法研究[D].合肥:中国科学技术大学图书馆,2010.
[14]OFSTAD A,NICHOLAS E,SZCODRONSKI R,et al.Ampl:accelerometer augmented mobile phone localization[C]// Proceedings of the First ACM International Workshop on Mobile Entity Localization and Tracking in GPS-less Environments.[S.l.]:ACM,2008:13 -18.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
中成药(2022年1期)2022-01-27
青少年科技博览(中学版)(2021年9期)2021-12-21
河北地质(2021年1期)2021-07-21
中国生物医学工程学报(2019年5期)2019-07-16
读者(2019年2期)2019-01-05
中国特种设备安全(2018年10期)2018-12-18
现代测绘(2018年1期)2018-03-06
中南林业科技大学学报(2017年12期)2017-12-19