大型民机可重构飞行控制系统研究*
2015-05-30 07:03中国商飞上海飞机设计研究院民用飞机模拟飞行国家重点实验室李正强乔文峰王振华
航空制造技术 2015年4期
中国商飞上海飞机设计研究院民用飞机模拟飞行国家重点实验室 黄 帅 李正强 乔文峰 王振华
现代飞行器电传飞行控制系统作用日益重要,由于其结构越来越复杂,因此电传飞行控制系统的可靠性和可维护性成为需要解决的首要问题。自修复飞行控制系统是指系统在使用过程中能够自行感知外部的环境变化,对自身的失效形式、故障等做出自诊断,并以一种优化的方式对环境变化做出响应,不断自动调整自身的内部结构,通过自生长或原位复合等再生机制,实现检测、隔离、自愈、修复、修补某些局部破损,最终达到预防和减免故障,实现民机飞控系统安全高效、长寿命、高可靠性的要求,并允许系统处于更大范围的故障情况,保证安全操作或理想的操纵品质,提高大型民机安全性。
自修复飞控系统分为故障检测与隔离和系统重构两个重要部分,前者对整个系统进行故障检测、隔离、模式识别等,并由后者针对识别出的当前系统模型重构控制律。先进自修复飞行控制技术在提高飞行安全性和任务效能方面有很大的发展潜力和应用空间。
自修复飞行控制技术的发展现状
自修复飞行控制的研究始于美国空军20世纪80年代进行的“2010年下一代技术”研究重点之一的自修复飞行控制系统设计。随后,由洛克希德·马丁公司将“自设计飞行控制器(SDFC)”用于RESTORE计划,并已成功地在F-16飞机上进行了试飞。近年来,波音公司在RESTORE项目上研发出了基于在线神经网络和动态逆的自修复控制系统,并以X-36飞机为载机试飞成功,它标志着自修复飞行控制技术已经发展到了新的水平。
我国在“九五”期间开展了自修复飞行控制技术研究,并对自修复系统在多种舵面故障和损伤情况下的故障检测和隔离以及控制自修复进行了地面半物理仿真试验,初步验证了该项技术方案的可行性,取得了一批阶段性的成果。目前,国外已在现代高性能歼击机飞控系统中完成了飞行验证,而国内重构控制的研究尚处于起步阶段。1993年航空科学基金才首次资助飞机重构控制系统的研究,北京航空航天大学和西北工业大学等院校相继获得资助项目。自20世纪90年代以来,航空专业相关大学研究小组进行了智能故障诊断与智能重构控制的研究,提出了基于神经网络的非线性鲁棒故障诊断和基于自适应能力的逆重构控制等方案。随着研究的深入,智能重构技术必将在航空航天及复杂工业过程的可靠性控制中发挥重要作用。
自修复控制的目标就是在一定范围内遭受损失和出现故障状态时仍能维持操纵品质。相较过去的鲁棒控制设计方法,自修复控制的重点涉及在线参数辨识、控制重新设计以及对降级飞行模态及其组合的适应。传统的飞行控制自修复的方法带来了4个重要且相对独立的问题:(1)故障检测;(2)故障隔离和识别;(3)降级系统的辨识;(4)飞行控制自修复以适应降级的传感器/作动器、机体结构。此外,对于飞行控制自修复必须考虑实时性的问题,由于增益调节需要辨识相对准确的飞机低频动力学特性,因而大大提高了技术的难度和复杂度。传统方法的另一个缺点是所确认的主要问题通常必须连续求解。每一层的设计都需要在适用性以及所用算法的精度和速度方面进行折中。因而,在上面列举的问题中,越往下技术的成熟度就越低。当前,相对机体上大规模非对称的多个潜在故障源的情况,使用现代线性控制理论以解决飞行控制自修复问题,尚不存在可靠的方法。另一方面,故障检测、传感器故障的隔离、在传感器降级条件下的状态估计等方面却是相对成熟的领域,已有许多成功的应用。因此,比较困难的是设计容错飞行控制系统,使之能够适应在作动器和机体方面出现的非对称故障。
先进自修复飞行控制方法
自修复飞行控制技术集中在仿生自修复控制系统、自修复控制理论和方法的研究,它涉及到状态监测诊断技术、人工智能技术、主动和自适应控制技术、信息和计算机技术等[1]。用于自修复控制设计的方法通常有:线性二次调节器方法、特征结构配置、多模型方法、自适应控制、伪逆法、变结构以及模型跟随等,下面介绍几种重要的方法。
(1)自适应定量反馈(QFT)自修复控制方法。
自适应QFT自修复控制方法的基础是定量反馈理论、预测技术(PDT)和降阶线性动态逆控制器(RLDI)。QFT/PDT/RLDI控制器可以对模型不确定性提供稳定性和鲁棒性,从而使得这种方法成为自修复系统设计中一个具有应用价值的选择。自适应自修复控制律的基本结构,如图l所示。该方法的主要特点是将自适应滤波器与QFT补偿器串接,从而利用了标定系统对象不确定性的固有鲁棒性。自适应滤波器使用了滤波最小方差算法(LMS)和模型参考自适应控制的结构,从而可以实时补偿偏离标定系统的动力特性,以充分发挥外回路的鲁棒性。该方法不需要对故障系统进行辨识。
(2) 伪逆法。
伪逆法在20世纪80年代末和90年代初得到了广泛的研究,因其在系统稳定性上的问题目前有所下降。它假定系统模型是线性定常模型,当操纵面发生故障时,可利用剩余无故障操纵面进行适当的线性组合,重构故障操纵面信号,这通常表现为在原输入阵前乘一个伪逆阵,所以称其为伪逆法,如下式所示:

伪逆法是故障发生时,首先进行故障的检测、隔离和估计,然后通过修改反馈增益,使重构后的系统性能接近正常飞行器性能。它引人注目的一个主要原因是其在计算和应用上极为简单。在20世纪80年代,许多学者对伪逆法在飞控系统重构控制方面的应用做了大量的理论研究和仿真计算,并在F-15验证机上进行了飞行验证,表明这是一种有效的重构控制方法。伪逆法可对未知故障进行在线计算和调整,但这时可能会出现一些问题,致使伪逆法失效,即系统的伪逆法解无法保证重构系统的稳定性,这对于它在线调整是不利的。
(3)基于神经网络的直接自适应控制方法。

图1 自适应QFT自修复控制系统基本构型
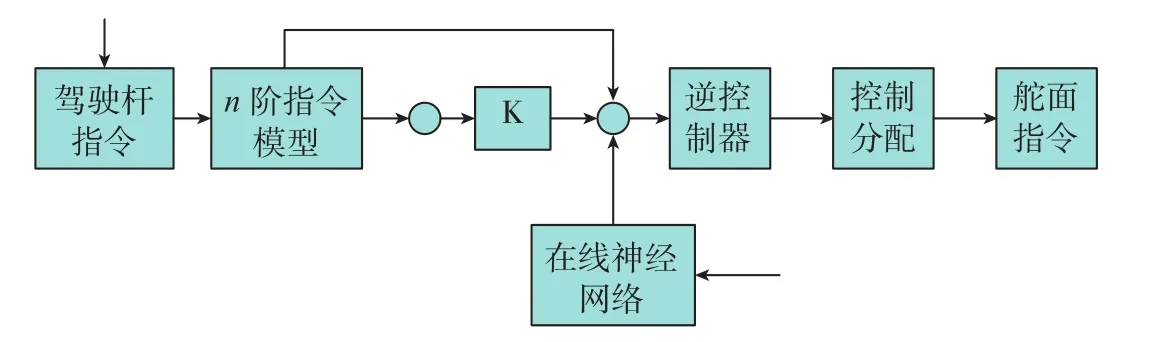
图2 基于神经网络的自适应自修复飞行控制系统构型
基于神经网络(Neural Network,NN)的直接自适应自修复控制方法,是目前的一个研究热点[2]。在RESTORE计划中,波音公司使用的就是这类方法,它在显模型跟随框架下以动态逆控制律为基础,并附加自适应神经网络,其自修复控制律的基本结构如图2所示。内回路用动态逆对标称模型线性化,采用描述理想响应特性的n阶指令模型对线性化的对象设计显模型跟随控制律。在线神经网络用于自适应地调节所用标称模型和真实对象间的逆误差。逆误差可能来自建模不确定性或故障/损伤。通过监测n阶指令模型和真实对象间的跟踪误差,神经网络可以探知逆误差,从而产生信号去抵消它的影响,增强n阶指令模型对逆控制器的输入。在出现故障/损伤后,神经网络具有稳定飞行器的能力,而不需要对稳定和控制导数进行系统辨识和估计,这样就降低了系统辨识在整个自修复控制律中的关键性。在线神经网络增强了逆控制器的指令并自适应地抵消了逆误差,从而获得理想的闭环动力特性。神经网络利用了一个Sigma-pi结构去实现线性基函数的展开,以便在每个轴进行自适应控制。
(4)基于多模型的故障检测隔离/自适应自修复控制(FDI-ARC)方法。
该方法建立在多模型、转换和校正(MMST)等概念的基础上,是严重机翼损伤情况下鲁棒控制自修复问题的唯一可行解决方案。如图3所示,整个方案包括多个并行的辨识模型(模型l~N)、相应的控制器(控制器1~N)以及适当选择的转换机制(转换/插值逻辑)。转换机制的作用就是发现最符合当前工作状态的模型,并转换到相应的控制器以得到得到改善的整体性能。该方法以一个有限集就可以描述不同的损伤情况的假设为基础。整个设计包括几步,其中之一就是为每个模型设计相应的控制器。控制器可以保证在每个模型周围充分大的集合内鲁棒,并使这些集合间相互交迭,从而保证自修复控制设计的解存在。整个系统建立在适当选择的针对每种损伤模型而设计的观测器的基础上,观测器并行运行以寻找最接近当前工作状态的模型,并切换到相应的控制器。所选择的切换顺序要保证整个系统的信号和理想性能有界。
(5)可重构滑模变结构控制算法。
滑模变结构方法用于可重构控制是由Shtessel和Buffington提出来的,它本质上是一个鲁棒控制器,能够自适应地处理作动器位置和速率限制。Shtessel等[3]提出来的控制是两环串行结构的,最终目标就是要跟踪给定的滚转角、俯仰角和偏航角。外环给内环提供角速度指令,外环设计用标准的鲁棒滑模控制技术。内环也是滑模控制器,但是它对作动器的幅值和速率限制有自适应性。Shtessel等[3]研究显示通过调节边界层的厚度可以避免积分饱和作动器的幅值和速率限制。系统的跟踪性能和边界层厚度是一对矛盾。它给了一个直觉上的方法来解决这个问题。Shtessel等[3]把多环滑模控制用在F-16和创新控制面飞机上。这个方法得到了很好的跟踪结果,且不需要对故障模型进行参数辨识。通过自适应的调节滑动模态面的有界层来解决作动器带宽限制问题。Hess和Wells共同提出了基于自适应观测器的滑模控制方法,并在F-18和创新控制面飞机上进行了验证。

图3 基于多模型的FDI-ARC基本结构
可重构滑模变结构方法有两个优点:一是作为一种鲁棒控制技术,它能够处理很多结构性的故障,这些故障改变系统的动态特性,而不仅仅是一些假定的不确定性;二是在线的边界层自适应性可以处理部分的作动器面缺失故障,而且能避免作动器位置限制和积分饱和,但降低了跟踪特性。
可重构滑模变结构方法也有两个不足:一是首先它假定输入矩阵是方阵或者可逆。对于飞机来说,这意味着对于每个控制变量,飞机必须有且仅有一个控制面,而且控制面不能有缺失。Shtessel等[3]考虑了控制面部分缺失的故障重构问题,但控制面的浮动和卡死是不容易解决的,需要增加一个控制分配模块。二是因为它包含的故障类型很多,所以控制器不可避免比较保守。
先进重构飞行控制技术的发展趋势、技术优势和应用前景
重构飞行控制技术在本质上是一种容错飞行控制技术,它使飞控系统可以适应未知故障和损伤,从而保证安全性和维持适当的操纵品质。先进重构飞行控制技术在原有基础上更强调自适应能力,不再依赖故障诊断和隔离(FDI)系统,因而促进了鲁棒控制、智能控制和自适应控制技术的交叉和融合。未来的重构控制技术将是在自适应概念下对现有技术的进一步综合和拓展,并必然朝着智能化的方向发展[4-6]。
波音公司在RESTORE 项目上的成功,是重构飞行控制技术发展的里程碑事件,同时也凸显了先进重构飞行控制技术的主要优势:
(1) 实时性能和长期的稳定性。在故障损伤后具有适当的恢复速度,以维持操纵品质和保证安全。
(2) 不是高增益控制,不会恶化结构模态耦合特性。
(3) 在恢复过程中不依赖参数辨识,同时也限制了故障后针对控制重新分配问题中参数辨识的范围。
(4) 大大削减飞控设计中对于精确气动参数数据库的需要。
(5) 大幅度地减少现行设计过程中大量的离线分析、试飞调参和确认以及由可能的故障状态所引发的不确定量的软件编码、调试、修改以及验证和确认(V&V)的工作量,从而大大减少新飞机开发中的相关研制费用。
特别是后两点优势,使得先进重构控制技术已经超出了自修复技术的范畴,成为一种经济、有效的先进飞控系统设计技术。这是对完全基于精确模型和频繁在线增益调节的经典设计技术的超越,由此带来的效益和应用潜力值得特别关注,并成为发展先进重构控制技术的又一主要推动力。重构技术有着广泛的应用前景,先进飞行重构技术的优势使它在飞控领域的应用范围大大加宽。
重构飞行控制系统应用中的问题以及拟解决方案
虽然重构飞行控制系统的研究已经有了20多年的历史,从目前发展情况来看,还缺乏实用性。一个重要的原因是新的重构控制系统要替代现有的控制系统,但是新的重构控制系统还缺乏充分的评估和确认。相比较之下,现有控制系统在正常工作情况下已经得到了验证,是比较完善的,研究人员开始考虑在现有控制系统结构的基础上加以扩展升级,使之具有重构控制功能。Wohletz[7]等针对民用飞机在现有控制律的基础上设计了新型重构控制方案,应用基于模型参考自适应的直接自适应方法构建了重构控制律,将重构功能作为一个模块添加到原系统中。
文献[8-10]对现有控制系统进行升级,使其具备重构功能,而不是完全以新的重构控制系统替换现有系统的重构设计方案,提出了并行结构和串行结构两种方案。新型重构控制系统实用化的一个障碍,是以自适应和智能神经网络为特点的先进重构控制系统的评估和确认工作还亟待建立和完善。文献[11-12]对自适应和智能神经网络在飞行控制中应用的评估和确认工作进行了研究。
结束语
对于先进重构飞行控制技术,国外已确认了下一步的研究领域。其中之一就是进一步完善先进重构算法和增益调节控制律的结合,以提高先进重构飞控技术的过渡潜力和应用灵活性。此外,在现有的研究结果上还需要额外的驾驶仿真和试飞,以全面地研究人机耦合、大迎角操纵以及面向全包线、全任务的技术应用,如起飞和着陆等。
先进自修复飞行控制技术是一种可行、高效和弹性的融合技术,它不仅可以用在民用和军用有人驾驶飞机上,有效地保证安全性和操纵品质,在无人作战飞机的开发上更是一种可行、高效和弹性的先进技术手段,它可使飞机具有故障后继续攻击,或安全返航的能力,取得提高机械效率,减少能源和材料消耗的效果;可有效缩短研制周期和降低开发费用,以大幅度地提高作战效能和使用效率。因此,自修复飞控系统技术将具有广泛的应用前景。
[1] 罗峰,丁凯峰,邓建华. 可重构飞行控制系统研究. 飞行力学,2001,19(4): 6-10.
[2] 朱铁夫,李明,邓建华. 具有重构功能的基于RBF神经网络直接自适应飞控系统.西北工业大学学报,2005,23(3): 311-315.
[3] Shtessel Y, Buffington J, Banda S. Multiple time scale flight control using reconfigurable sliding modes// IEEE. Proceedings of the 37th IEEE Conference on Decision and Control. Florida: IEEE,1998: 4196-4201.
[4] Reiman S E, Dillon C H, Lee H P,et al. Adaptive reconfigurable dynamic inversion control for a hypersonic cruise vehicle // AIAA.Proceedings of AIAA Guidance,Navigation,and Control Conference and Exhibit. Hawaii: AIAA,2008: 1-11.
[5] Zhong Y W,Yang L Y,Shen G Z.Control allocation based reconfigurable flight control for aircraft with multiple control effectors//AIAA. Proceedings of 47th AIAA Aerospace Sciences Meeting Including The New Horizons Forum and Aerospace Exposition. Florida: AIAA,2009: 1-12.
[6] Hess R A, McLean C. Development of a design methodology for Reconfigurable flight control systems //AIAA. proceedings of 38th Aerospace Sciences Meeting and Exhibit.Nevada:AIAA,2000: 1-13.
[7] Wohletz J M. Retrofit systems for reconfiguration in civil aviation. Massachusetts:Massachusetts Institute of Technology, 2000.
[8] Monaco J F, Ward D G, Bateman A J D. A retrofit architecture for modelbased adaptive flight control// AIAA. AIAA 1st Intelligent Systems Technical Conference.Illinois: AIAA, 2004: 1-18.
[9] Sharma M, Calise A J. Neural-network augmentation of existing linear controllers.Journal of Guidance, Control, and Dynamics,2005, 28(1): 12-19.
[10] Jacklin S A, Schumann J M, Gupta P P. Development of advanced verification and validation procedures and tools for the certification of learning systems in aerospace applications// AIAA. Infotech@Aerospace.Virginia: AIAA, 2005: 1-16.
[11] Bandyopadhyay B, Janardhanan S.Discrete-time sliding mode control . New York:Springer Berlin Heidelberg, 2006.
[12] Jacklin S A, Lowry M R, Schumann J M. Verification, validation, and vertification challenges for adaptive flight-critical control system software // AIAA. Proceedings of AIAA Guidance,Navigation,and Control Conference and Exhibit. Rhode Island: AIAA, 2004: 1-10.
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
摄影世界(2022年1期)2022-01-21
煤气与热力(2021年12期)2022-01-19
建材发展导向(2019年13期)2019-08-24
电子制作(2019年7期)2019-04-25
知识经济·中国直销(2018年12期)2018-12-29
商周刊(2017年6期)2017-08-22
照明工程学报(2016年3期)2016-06-01
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28