四轮独立驱动无人车的动力性参数设计仿真
2015-06-23 13:52魏代强战仁军刘翰诺
火力与指挥控制 2015年6期
魏代强,战仁军,刘翰诺
(武警工程大学装备工程学院,西安 710086)
四轮独立驱动无人车的动力性参数设计仿真
魏代强,战仁军,刘翰诺
(武警工程大学装备工程学院,西安 710086)
四轮独立驱动无人车的轮毂电机功率、蓄电池容量与组数以及无人车续驶里程等参数的匹配设计是无人车研制过程中整体设计的一个难点和重点,需要通过无人车运动学和动力学分析进行确定,既要满足可行性又要具有很好的可靠性。根据实际需要和动力性设计要求,在对无人车进行运动和动力学分析的基础上,通过理论计算得到动力性参数,然后通过ADVISOR软件建立四轮独立驱动整车仿真模型,对其动力性进行仿真。通过仿真,其最高车速、爬坡性能、加速性能以及行驶里程在不同的工况下得到仿真结果与理论设计的参数相吻合,验证了参数设计的合理性,为下一步无人车样机的制作以及进行整车运动控制研究具有重要实际意义。
无人车,动力性,ADVISOR仿真
0 引言
随着科学技术的不断发展,以计算机技术、图像处理技术、网络通信技术和芯片控制技术等为基础的无人车发展研究逐渐受到各国的重视。在民用方面,具有自主导航能力的无人车由于其先进的处理器相比人脑反应更快,因此,相比有人驾驶更加智能和安全,并且不会产生疲劳。在军用方面,无人车可代替士兵执行的任务包括侦察、排雷、监视等,能够减少人员伤亡和提高战斗效率。同时这些自主移动无人车非常灵活,可以穿越复杂地形,部分型号的车辆可以装备机枪等攻击性武器,极大地提高了部队的战斗力[1]。
目前大部分无人车的动力由动力电池提供。因为我国的一些电池和电机等技术还有待进一步提高,目前电动汽车还都处在一定的研发初级阶段。因此,如何更好地匹配和优化电动汽车各个动力部件参数,对提高电动汽车动力性、增加其续驶里程具有重要意义[2]。本文以正在研究的无人车为背景,对其动力传动系统的参数进行合理选择和匹配计算,由于ADVISOR软件中没有相应的纯电动四轮独立驱动的汽车仿真模型,因此,本文在已有的纯电动车模型的基础上新建四轮独立驱动的电机、车轮和铅蓄电池等动力部件的仿真模型及整车模型,对整车的动力性进行了仿真分析。
1 无人车的动力系统参数匹配设计
无人车动力性系统参数匹配主要是指对电动机的功率的设计、传动系参数的设计和动力电池的设计等。由于本文研究的无人车采用轮毂电机,直接驱动车轮,没有传动结构,因此,在此不作传动系参数的设计。
1.1 整车基本参数设计
无人车的动力系统结构图,如图1所示。
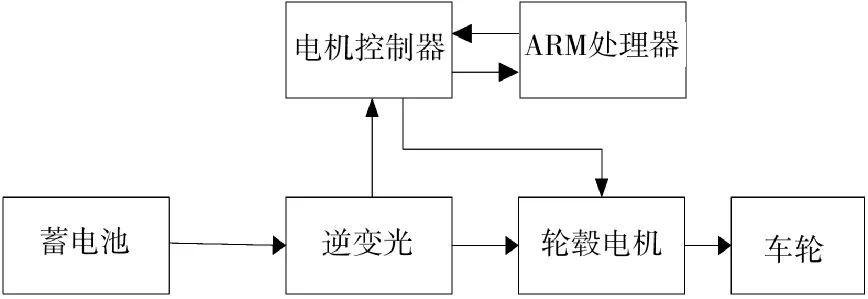
图1 动力系统结构图
通过图1,可以看出整车的动力由动力蓄电池提供,通过逆变器给轮毂电机供电,电机在控制器的控制下提供动力。电池的容量和电压,轮毂电机的功率的大小是设计的重点。根据实际需要和动力性的设计要求,整车的结构参数和动力性参数如表1所示。
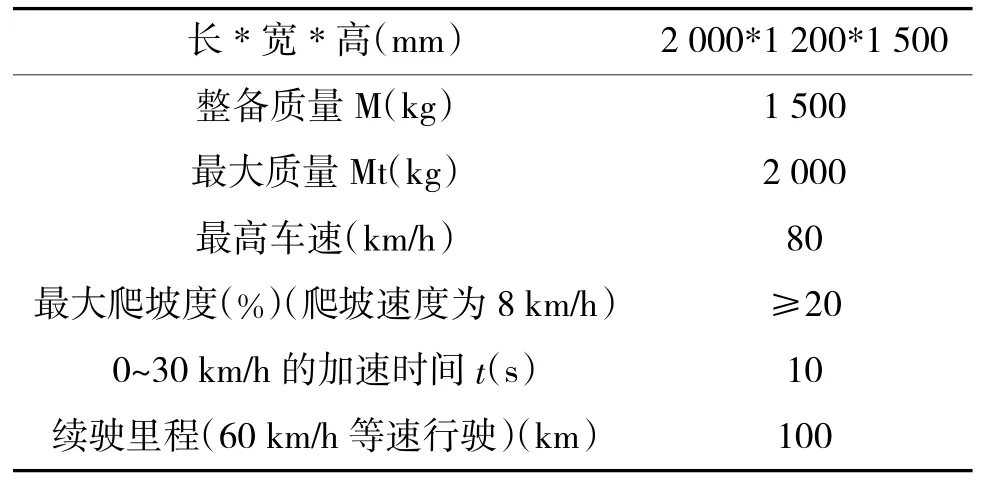
表1 整车的结构参数和动力性指标
1.2 轮毂电机参数设计
无人车采用的驱动方式是四轮独立驱动,选用轮毂电机作为驱动电机。驱动电机的功率对无人车的加速性能、爬坡性能和最高车速有至关重要的影响。其值应不低于无人车以最高车速行驶的功率,也要能满足汽车以某车速爬坡的功率,还要满足汽车加速行驶的功率需求。通过对轮毂电机和无人车的运动建模和动力学分析,无人车的牵引力由轮毂电机提供,主要克服地面摩擦力和空气阻力,因此,无人车的行驶方程式[3]为:

式中,Ttq为电机转矩;ηt为传动系统效率;r为车轮半径;M为无人车整备质量(Kg);g为重力加速度(m/s2);o为爬坡度(°);f为滚阻系数;CD为空阻系数;A为迎风面积(m2);δ为汽车旋转质量换算系数;t为加速时间(s);igi为变速箱速比,io为主减速比(因为无人车采用的是轮毂电机,因此,令igi=io=1)。
1.2.1 轮毂电机的转矩
轮毂电机的最大转矩应该满足电动汽车所设计的最大爬坡度,根据式(1)可知:

其中,α取最大爬坡度20%,爬坡速度V取8 km/h。求解公式得到轮毂电机的最大转矩应是855.33 N·m,无人车采用四轮驱动,因此,每个轮毂电机的最大转矩为213.83 N·m,取过载系数为2.5,则每个轮毂电机的额定转矩为85.53 N·m。
1.2.2 轮毂电机的转速
轮毂电机的最大转速应该对应着汽车行驶时的最大车速:

其中,np为最大转速,Vmax为设计的最大行驶的速度。可以得到轮毂电机的最大转速为860 r/min。
1.2.3 轮毂电机的功率
(1)最高时速时的功率选择
无人车在水平路面上进行行驶时,根据汽车的行驶平衡方程,无人车以最高车速行驶的功率为

式中,Pmaxs最高车速对应的轮毂电机功率(kw);Vmax无人车的最高车速(km/h);通过计算:Pmaxs=10.28。
(2)最大爬坡度时的功率选择
无人车在爬坡或下坡时,通过对车辆受力分析可知,车辆受到滚动阻力、空气阻力和爬坡阻力的作用,若最大坡度为α时,无人车行驶的功率为:

式中,Pmaxg最大坡度时对应的轮毂电机功率(kw);Vo爬坡时汽车的行驶速度(km/h);α最大坡度(%);通过计算得到,Pmaxs=6.89。
(3)根据加速时间的功率选择
无人车在水平路面上由静止的状态下加速到速度V时,受到滚动阻力和空气阻力的作用,则无人车达到一定速度的加速时的功率为:

式中,Pacct加速阶段对应的轮毂电机功率(kw);V无人车的加速末速度(km/h);t加速时间(s);通过计算得到,Pacct=13.16。
(4)轮毂电机功率的确定
以上功率是在无人车进行最高车速、最大爬坡度、加速时间的3种情况下得到的,取其中最大值作为额定功率,同时为避免出现超载现象而导致电机的损坏,最后计算应乘以过载系数λ,轮毂电机峰值功率为:

式中,Pmm为轮毂电机的峰值功率;λ为过载系数;Pe为额定功率。
通过以上计算确定轮毂电机额定功率为14 kw,峰值功率为20 kw。由于是四轮驱动,因此,每个轮毂电机的功率为3.5 kw。
1.3 蓄电池的参数设计
动力电池组是由单体电池串联组成的一个整体,单体电池的数量决定电池组的输出电压和输出功率。电池组容量的选择需要满足纯电动汽车的空间结构和行驶里程的要求。
1.3.1 电池组单体电池数量的选择
电池组的输出电压要能满足电动机的工作电压,由此确定单体电池数量为:

其中:Nb为单体电池的数量;Um_min为电动机的最小工作电压(V);Ub_min为单体电池的最小输出电压(V);根据计算得到:Nb=6。
1.3.2 电池组容量的选择
电池组的容量会影响纯电动汽车的整车质量,与行驶里程更是相互制约,电池组容量的选择要能保证纯电动汽车的动力性和行驶里程。
行驶里程和平均行驶速度计算:

其中:C电池组容量(A·h);Pave平均输出功率(kW);L纯电动汽车行驶里程(Km);Vave车辆平均行驶速度(Km/h);Uer电动机额定电压(V);根据计算得到:
通过计算,达到无人车行驶要求的动力性的参数表设计为表2所示:

表2 动力性参数设计值
2 动力性能仿真
利用汽车仿真软件ADVISOR进行无人车的动力性仿真,针对计算结果进行验证。汽车仿真软件ADVISOR是美国能量部为其管理混合动力驱动系统子合同项目在1994年11月份而开发的,它是通过内部子模块进行组装,基于MATLAB/SIMULINK环境下设计的一典型模块化仿真软件[4]。ADVISOR的仿真计算分为两条路线,一条是后馈路线,主要是解决了如果要达到所要求的汽车速度,驱动链应该向上要多大的功率,它的方向是从下向上传递的(如从车轮一>变速器一>电机),也称为要求路线(require);另一条是前馈路线,解决已经从上面传递来这么多功率,应该能向下面传递多大实际功率,进而在汽车驱动车轮上称获得多大的驱动力来计算实际的汽车车速,它的方向是从上向下传递的(如从电机一>变速器一>车轮),称为实际/获得路线(actual/available,achievable)[5]。纯电动汽车的仿真顶层模块图如下页图2所示,由于软件中没有关于四轮独立驱动的纯电动车模型,且没有轮毂电机的模型,因此,需要针对现有的后轮驱动的纯电动车进行改进,建立新的四轮独立驱动的纯电动车模型。
2.1 加速和爬坡性能仿真
通过对软件advisor中已有的文件进行改进,建立四轮独立驱动的纯电动车模型,按照上节中整车参数设计和动力性参数设计值进行参数仿真,仿真结果如下页图3~图7所示。
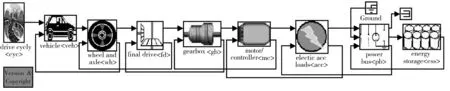
图2 纯电动车的仿真顶层模块图
加速性能仿真结果:
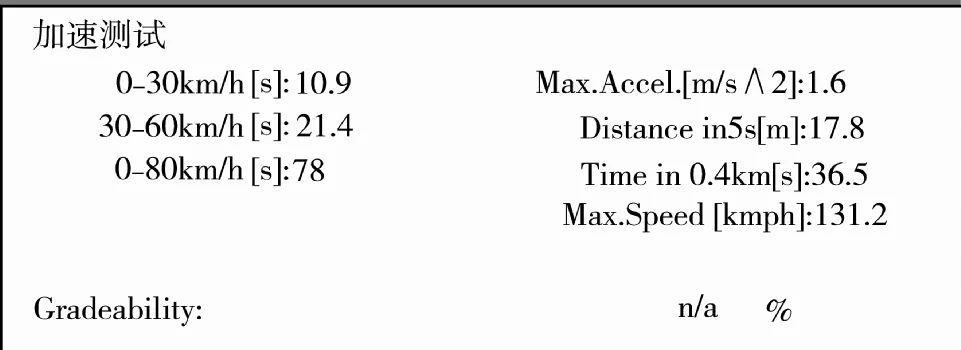
图3 加速性能仿真结果

图4 无人车车速V(km/h)与时间t(s)关系

图5 蓄电池的电量状态随时间t(s)变化关系

图6 电机输出转矩T(N·m)与时间t(s)关系

图7 电机转速n(r/min)与时间t(s)关系
从仿真结果来看,图3可知加速性能的结果:0到30 km的加速时间为10.9 s,从30 km到额定车速60 km的时间为21.4 s,也就是说,在平坦的路面上,无人车从0加速到额定车速的时间为32.3 s,达到最大车速的时间为78 s。其中,最大的加速度为1.6 m/s2,5 s内的行驶距离为17.8 m,能够达到最大的车速为131.2 km/h。从图5中可以得到车辆在加速过程中铅蓄电池的电量状态随时间的变化。从图6和图7中可以得到车辆在加速过程中的电机的输出转矩和转速随时间的变化,无人车起步阶段,转矩迅速增大,以获得较大加速度。随无人车速度的提高,转矩逐渐降低,车轮转速不断增加。
爬坡性能仿真结果:
从仿真结果来看,无人车在8 km/h的车速,电池满电量的情况下,最大爬坡为26.6%,其中爬坡时电机的转矩为167.512 8 N·m,转速为41.249 r/min。
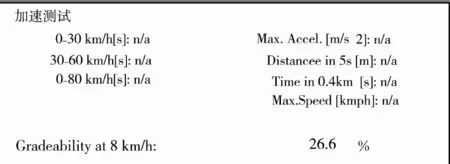
图8 爬坡性能仿真结果

图9 无人车车速V(km/h)与时间t(s)关系

图10 蓄电池的电量状态随时间t(s)变化
图11 电机输出转速n(r/min)与时间t(s)关系
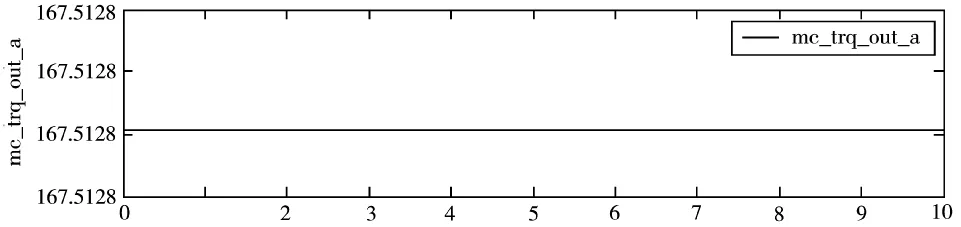
图12 电机转矩T(N·m)与时间t(s)关系
2.2 典型路况仿真
首先选择等速法对无人车的行驶里程进行仿真。在CYC_CONST_60工况下进行连续循环次数30次的仿真,以测试无人车在60 km/h的恒速下,车辆的续航里程。CYC_CONST_60工况的循环时间为360 s,行驶距离6.04 km,速度恒为60 km/h。得到续航里程随时间曲线如下页图13所示,在此工况下汽车的最大巡航里程为100.67 km。
其次选用工况法对行驶里程进行仿真。针对实际路况的情况,选择常用的仿真循环工况,即美国的城市驱动工况CYC_UDDS对无人车进行仿真。其速度曲线如图14所示。
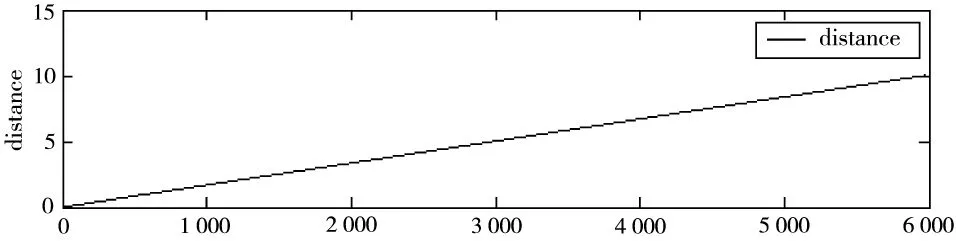
图13 无人车60 km/m恒速下续驶里程s(×104m)与时间t(s)的关系
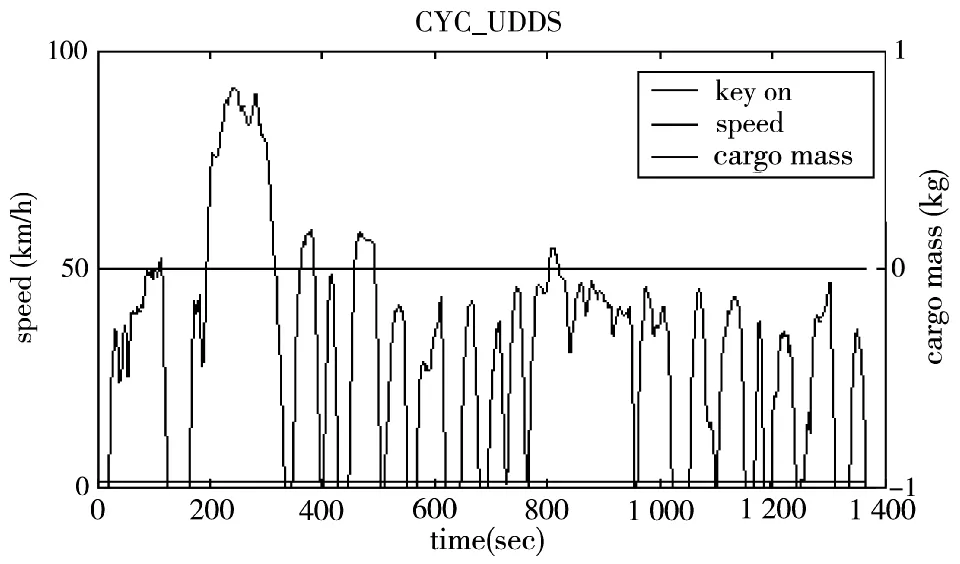
图14 美国城市驱动工况CYC_UDDS下速度与时间、载重关系曲线
从图14中可以看出,在载重量为零的情况下,车速随着道路路况的不同,速度由高到低,直至停止,后又起步加速行驶。美国城市驱动工况的循环周期为1 369 s,行驶里程为11.99 km,平均速度为31.51 km/h,最大的速度为91.25 km/h,平均加速度为0.5 m/s2,其中间停车次数为17次。将循环次数设置为20次,仿真结果如图15~图20所示。

图15 美国城市驱动工况CYC_UDDS下加速性能和爬坡性能测试
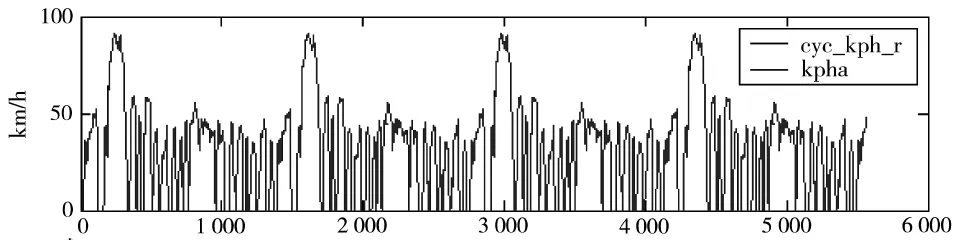
图16 无人车车速V(km/h)与时间t(s)关系
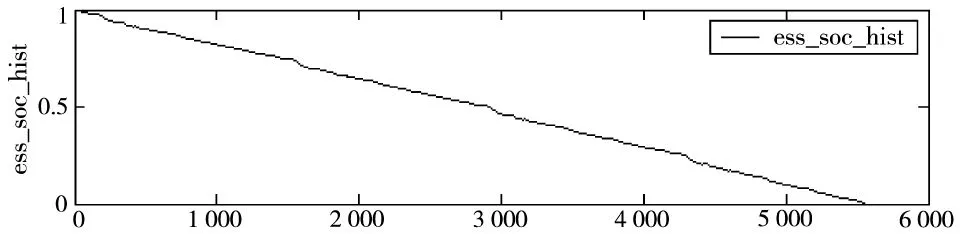
图17 蓄电池的电量状态随时间t(s)变化
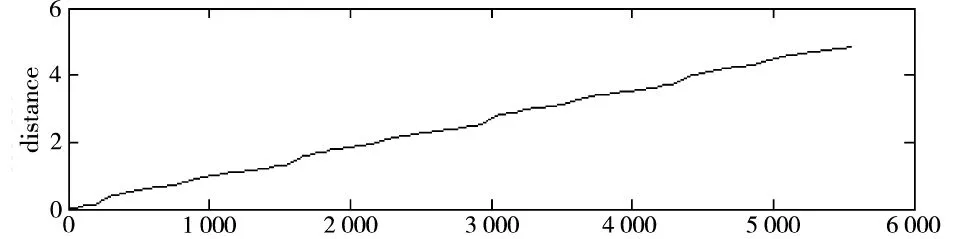
图18 无人车行驶里程s(×104m)随时间t(s)变化

图19 无人车轮毂电机输出转矩随时间t(s)变化

图20 无人车的牵引力随时间t(s)的变化
由仿真结果图15可以看出,由于出现实际的道路工况,模拟仿真值与之前的独立仿真有差别,但是差别不大。图16中,循环工况中要求达到的车速,无人车仿真过程中均能达到,因此,两条速度曲线重合,最大的车速为91.25 km/h。从图17和图18可以看出,在电量完全放完的情况下,无人车在CYC_UDDS工况下,行驶了4个循环,行驶里程为47.96 km。由于进行道路循环工况中,需要起步、加速和减速停车等仿真操作,因此,耗电量增加,行驶里程相比在CYC_CONST_60工况下降低很多。通过进一步修改参数,将电池的容量改为200 A·h时,通过仿真,能够达到的续驶里程为95.92 km,达到了实际要求,仿真结果如图21所示。图19和图20可以看出随着路况的不断变化,无人车的电机输出转矩和整车的牵引力随着不断变化,来调节无人车的车速,负数代表整车处于制动状态中。

图21 无人车行驶里程s(×104m)随时间t(s)变化
2.3 动力性仿真结果分析
通过理论计算值与仿真值的对比可以看出,不论是单独对无人车的加速性能和爬坡性能进行仿真,还是通过实际的路况进行仿真,都能够达到设计要求,0到30 km/h的加速时间均控制在10 s左右,爬坡能力均能达到设计的坡度20%。在对蓄电池的行驶里程的单独仿真过程中,续航里程能够达到设计要求100 km,但是在实际路况中,由于多次的起步停车,消耗了较多电量,因此,未能达到设计的续驶里程,通过进一步重新选取电池容量,将电池容量选为200 A·h,仿真结果达到无人车对行驶里程的要求。
3 结论
通过对无人车的运动分析和动力学分析,建立无人车的运动模型。通过对无人车的动力学分析,对无人车的动力部分轮毂电机和铅蓄电池的参数进行设计。通过汽车仿真软件ADVISOR对无人车进行动力学仿真,对参数设计合理性进行验证。通过仿真结果来看,无人车动力性参数设计合理可靠,对下一步无人车的运动控制研究具有重要意义。
[1]胡晖.六轮独立驱动无人车下位机控制系统研究[D].上海:上海交通大学,2012.
[2]尹安东,苏信杰,赵韩.电动轿车动力系统参数设计和动力性能分析[J].汽车科技,2009,9(1):23-26.
[3]Huang W,Wang Y N,Feng K.Developmentof a Two-Speed Automatic Transmission for Pure Electric Vehicles[J]. Automotive Safety and Energy,2011,2(1):72-76.
[4]曾小华.军用混合动力轻型越野汽车动力总成匹配及控制策略研究[D].吉林:吉林大学,2001.
[5]曾小华,宫纬钧.ADVISOR 2002电动汽车仿真与在开发应用[M].北京:机械工业出版社,2014.
Parameter Design and Simulation of Dynamic Property for Four-wheel Independent Drive Unmanned Vehicle
WEI Dai-qiang,ZHAN Ren-jun,LIU Han-nuo
(Engineering College of CAPF,Equipment Engineering College,Xi’an 710086,China)
It is a difficulty and key,which is that they are studied to acquire the accurate parameters to match the design for the four-wheel independent drive unmanned vehicle,which are the power of in-wheel motor,the numbers and capacity of battery and the driving range and other parameters.They are determined by the unmanned vehicle kinematics and dynamics analysis,and should not only meet the feasibility and to have good reliability.According to the actual needs and requirements of dynamic property design,the dynamic parameters is obtained by theoretical calculation on the basis of the unmanned vehicle kinematics and dynamics analysis,and then We establish vehicle simulation model with ADVISOR software applications,which can be used to do dynamic simulation for conducting to verify rationality of the design parameters.Through the simulation,the result that the power index of its maximum speed,climbing performance,acceleration performance and mileage by simulation in different conditions can meet the unmanned vehicle,which has verified rationality of the design parameters.It has important practical significance for the prototype production and the further conduct of vehicle motion control research.
unmanned vehicle,dynamic property,ADVISOR simulation
U461.2
A
1002-0640(2015)06-0176-05
2014-05-07
2014-06-20
魏代强(1990- ),男,山东临沂人,硕士研究生。研究方向:军事装备保障。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年4期)2022-03-07
汽车实用技术(2021年3期)2021-02-24
上海师范大学学报·自然科学版(2018年3期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
科技创新与应用(2016年36期)2017-02-21
中国新技术新产品(2017年2期)2017-01-20
汽车与驾驶维修(汽车版)(2015年8期)2015-03-25
汽车维护与修理(2015年5期)2015-02-28