基于带宽-相位滞后准则的飞机PIO评估应用研究
2015-07-28 06:26上海飞机设计研究院上海201210
山东工业技术 2015年11期
关键词:飞机
王 磊(上海飞机设计研究院,上海 201210)
基于带宽-相位滞后准则的飞机PIO评估应用研究
王 磊
(上海飞机设计研究院,上海 201210)
摘 要:现代飞机通常采用电传控制律实现对飞机的三轴操纵,增稳功能和非线性环节的引入导致其易于出现驾驶员诱发振荡,需要采用合适PIO评价准则预期闭环飞机的PIO趋势,以更好地指导控制律设计。本文对带宽-相位滞后准则辅以修订回落量准则的评估方法开展研究,并以算例飞机为对象进行评估应用研究。研究结果表明,这一评估方法可以较好地预测闭环飞机的PIO趋势。
关键词:飞机;控制律;驾驶员诱发振荡;带宽;相位
0 引言
驾驶员诱发振荡(Pilot Induced Oscillations,PIO)属于不利的人机耦合振荡,当驾驶员操纵飞机时有时会出现持续或不可控的飞机响应振荡。由于PIO会极大地降低飞机的飞行品质甚至影响其飞行安全,因此需要在飞机设计初期开展PIO趋势的预测评估,以更好地指导飞机的总体设计、飞行品质评估和控制律设计等。按照PIO的振型分类,通常可分为3类PIO,I类PIO属于线性人机耦合振荡,主要是由于系统相位滞后或时延过大而产生[1]。
电传飞机采用了具有控制增稳功能的飞行控制系统,闭环系统中涉及到很多的高增益和非线性环节等,这些因素可能会导致整个闭环高阶系统的相位滞后和时延增大等,进而影响其产生PIO的趋势。
本文采用带宽-相位滞后准则开展I类PIO评估,并将其应用于某电传飞机上,以探讨这一评估方法的使用,研究结果可用于飞机的PIO评估时使用,并用于指导飞机的控制律设计。
1 研究对象
本文的评估基于带控制律的闭环算例飞机的俯仰角和俯仰角速度的短周期低阶等效模型:
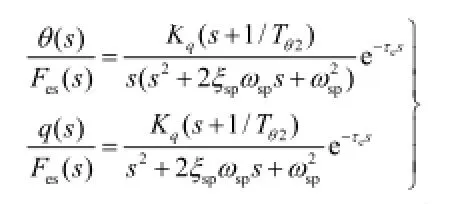
式中:Τθ2为等效短周期的分子时间常数,sp和sp分别为等效短周期的阻尼比和自然频率,e为等效时间延迟。
实际上,由于短周期低阶等效拟配的考察频率范围在0.1~10rad/ s[1. 2](为了避免长周期的影响,左边界往往会右移),而频域PIO准则的评价通常也在这一频率范围内,因此闭环高阶和低阶等效系统在高频段的频响类型也是非常接近的,故采用低阶等效系统的频响特性来考察带宽-相位滞后准则是适合的。
针对算例飞机在不同重量、前或后重心位置和不同飞行状态下,开展I类PIO趋势评估,可预测该型飞机的I类PIO趋势,并可用于指导该飞机的控制律设计。
2 带宽-相位滞后准则定义与评估方法
带宽-相位滞后准则重点从考察飞机的开环俯仰姿态频响特性的角度出发。该准则由规定的开环系统的带宽ωBW及相位滞后τp的相互关系而确定。带宽ωBW 的确定基于飞机的开环俯仰姿态频域响应图,取相位裕度等于45°或幅值裕度等于6dB所对应频率的较小者[2],如所图 1示。相位滞后τp的确定如下式所示[1, 2]:

式中:ω180是相位等于−180°时的频率;是2倍ω180频率处的相角。从物理意义上来说,相位滞后τp可以看成是高增稳飞机的一个等效相位滞后。
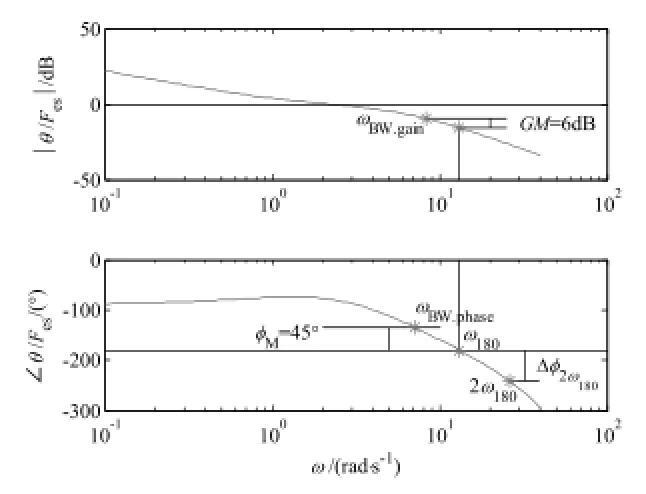
图 1 开环俯仰姿态频率响应伯德图
依上述定义,给出带宽ωBW和相位滞后τp的具体求解方法如下:
(1)求得系统开环俯仰姿态频域响应的伯德图(见图 1);
(2)从相频特性曲线上确定相角等于−180°的频率ω180,然后找到相位裕度为45°,即相角等于−135°的频率ω135,该频率定义为相位带宽;然后找到与ω180所对应的幅值,在此基础上增加6dB,从而求得幅值带宽。带宽ωBW取为与中的较小者;
实际上,带宽ωBW是能闭合飞机-驾驶员回路而又不危及闭环系统稳定性的最高频率参数[1]。它是一种频率度量,在该频率以下,飞机能够跟随所有的驾驶员指令;在该频率以上则无法完全跟随。另外,从相位滞后τp的确定可见,它是−180°附近相频曲线斜率的一种度量。
带宽-相位滞后准则能够较为有效地预示PIO趋势,特别是能很好地预测高频相位跌落造成的PIO。该准则的判据如图 2(a)所示,要求如下[3]:
(1)如果在起飞阶段相位滞后τp≥0.12s,着陆阶段τp≥0.15s,则飞机有PIO的趋势;
(2)如果回落量过大且带宽ωBW≤2rad/s,则飞机有PIO的可能性;
(3)如果带宽ωBW≥2rad/s且相位滞后τp≤0.12s,则过大的回落量将导致飞机产生“点头”现象,但是不会产生严重的PIO。
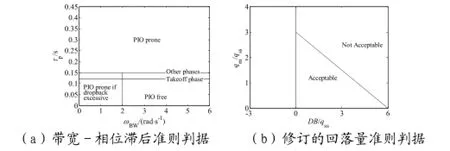
图 2 带宽-相位滞后准则判据和修订的回落量准则判据
当飞机落入“有PIO的可能性”区域,还需通过其回落量来判断其是否具有“确定的PIO趋势”。文献[1, 2]指出:(1)在飞行航迹控制和跟踪时,负的姿态回落(即姿态超调)将导致缓和不可预测的响应,有时会伴随严重的PIO;(2)在跟踪任务中,增加姿态回落(具有较大的俯仰速率超调)将会导致突变响应和“点头”,从“轻微趋势”到“持续振荡”,有时又称为PIO。这表明,负的姿态回落和过大的回落量都是不满意的,它们都容易导致飞机出现PIO趋势。
采用修订的回落量准则,准则判据如图 2(b)所示。
3 评估应用
按照上述求解方法,求得算例飞机的俯仰姿态-杆力开环频响的带宽ωBW和相位滞后τp。带宽-相位滞后准则的评估结果如图 3所示。
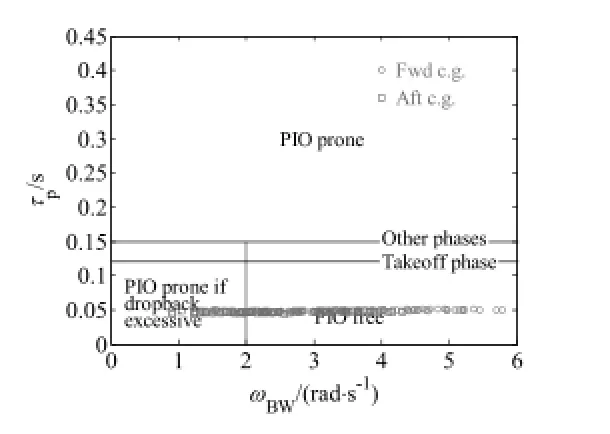
图 3 带宽-相位滞后准则评估结果图
从图 3可以看出,算例飞机的相位滞后τp均小于规定值;带宽ωBW则覆盖了较大的频率区域,从0.8rad/s到6rad/s。另外,通过对比计算结果的原始数据可知,低阶等效系统的短周期自然频率sp很接近于带宽ωBW,正因如此,算例飞机在控制律提供相同增稳条件下后重心时较小的自然频率使得其带宽ωBW也相对较小。
从图 3可以看出,一部分状态点确定不具有PIO的趋势;而另一部分的状态点具有可能的PIO趋势,还需通过判断其回落量是否过大或为负值来进一步确定其PIO趋势。
下面通过修订的回落量准则来考察其回落量,评估结果如图 4所示。
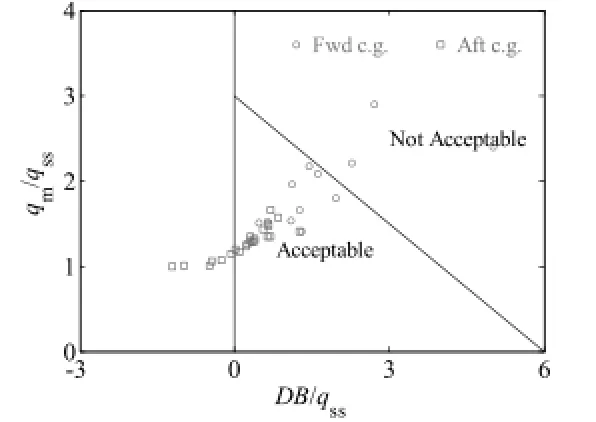
图 4 修订回落量准则评估结果图
从图 4可以看出,算例飞机在前重心情况下倾向于往右上边界跑,部分出现回落量过大的情况;而在后重心情况下则倾向于往左边界跑,部分出现回落量为负的情况。原始计算数据还表明,负的回落量DB/ qss往往对应于后重心、过阻尼的情况,即低阶等效系统的短周期阻尼比sp>1。
经修订回落量准则下的进一步评估,确定算例飞机的PIO评估结果:考察的状态点中,有6%的状态点具有PIO趋势。
4 结论
通过以上的研究,可以得出以下结论:
通过采用带宽-相位滞后准则可以预测飞机可能存在的PIO趋势的状态点,然后辅以修订回落量准则进一步确定具有PIO趋势的状态点。
参考文献:
[1]高金源. 飞机飞行品质[M]. 国防工业出版社, 2003.
[2]MIL-HDBK-1797, Flying qualities of piloted aircraft[S]. 1997.
[3]RTO-TR-029, Flight control design - best practices [R]. 2000.
猜你喜欢
小哥白尼(军事科学)(2022年3期)2022-06-09
环球时报(2022-05-30)2022-05-30
民用飞机设计与研究(2020年4期)2020-11-27
当代陕西(2019年11期)2019-06-24
作文周刊·小学一年级版(2017年9期)2017-06-20
小学生导刊(低年级)(2016年8期)2016-09-24
幼儿智力世界(2016年6期)2016-05-14
中国火炬(2015年1期)2015-07-25
儿童时代·幸福宝宝(2009年6期)2009-11-20
科普童话·百科探秘(2009年6期)2009-07-14