
轮式摊铺机前轮辅助驱动系统的设计
2015-08-08 22:45王进任志国王剑波何靖��
筑路机械与施工机械化 2015年2期
关键词:前轮
王进 任志国 王剑波 何靖��
摘 要:针对轮式摊铺机整机驱动力不够以及前轮辅助驱动可能存在的负向寄生功率、打滑等问题,分析了基于前轮与后轮速度匹配来实现前轮辅助驱动存在的种种弊端,设计了一种电比例多路阀来驱动两个并联的马达,并采用液压分流阀强制分流的结构,通过测量前轮驱动的压力,进行压力匹配控制。装机验证结果表明,各工况下前轮均能提供较好的辅助驱动效果。
关键词:轮式摊铺机;前轮;辅助驱动;压力匹配控制
中图分类号:U415.52 文献标志码:B
0 引 言
轮式摊铺机因其机动性强和功能多的特点在社区道路、乡村公路、市政工程等施工场所得到较为广泛的应用。通常情况下,轮式摊铺机行驶驱动系统标配后轮主驱动系统和选配前轮辅助驱动系统,且前轮采用实心轮胎(压缩量小),后轮采用充气轮胎,轮胎数量的配置有后4前2、后2前4等多种形式。前轮辅助驱动系统的目的在于充分利用前轮的着地情况(尤其在施工时,当料斗里面装有摊铺料时,前轮着地情况良好,与地面的摩擦力较大),适当地提供驱动力,使整机牵引性能提升;与此同时,利用前轮的转向导向作用,后轮配合差速可以实现整机良好的转向性能,即转向时前轮侧向滑移小,且转向半径小。前轮辅助系统的结构与匹配控制是关键,否则在某些情况下无法有效地提供驱动力,甚至还有可能产生反向的寄生功率,使整机牵引性能降低[1-2]。本文从前轮转向机械结构、液压驱动系统结构、压力匹配控制算法几个方面进行设计,以较少的成本增加实现预期设计目标,通过在某型轮式摊铺机上应用和测试,在后轮打滑、前轮打滑和悬空等工况下充分验证了其有效性。
1 前轮辅助驱动系统结构
1.1 机械结构
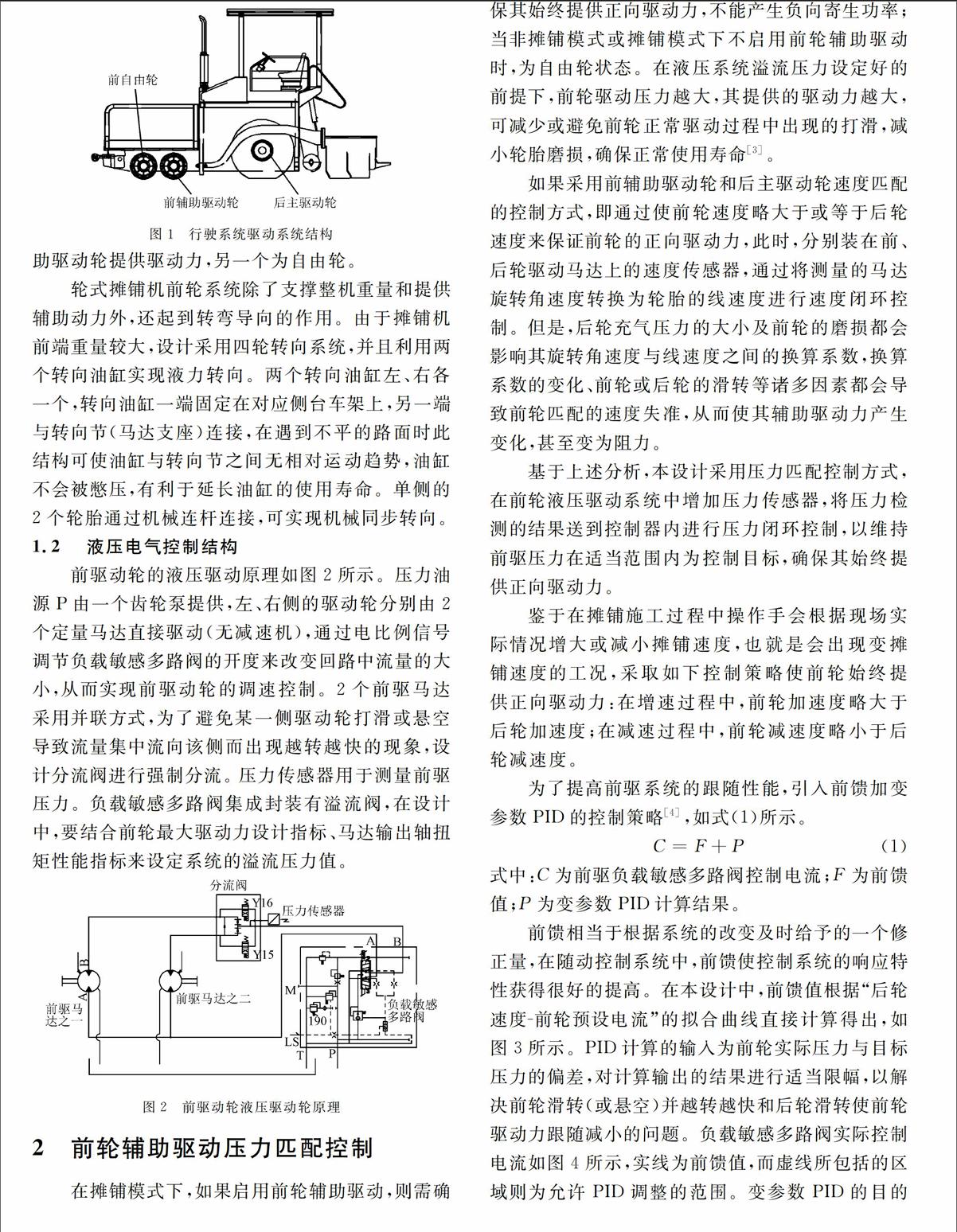
图1 行驶系统驱动系统结构
某型轮式摊铺机行驶系统结构如图1所示,由后主驱动轮和前辅助驱动轮组成,后主驱动轮采用2个充气轮胎(双泵双马达左右独立控制的液压驱动结构);为了提高前辅助驱动轮在复杂路面的适应能力,采用前面4个实心轮的结构,单侧2个轮胎采用桥接方式,设计有一定的纵向摆动角度,从而确保在起伏路面上前轮着地良好。此外,单侧只有前辅助驱动轮提供驱动力,另一个为自由轮。
轮式摊铺机前轮系统除了支撑整机重量和提供辅助动力外,还起到转弯导向的作用。由于摊铺机前端重量较大,设计采用四轮转向系统,并且利用两个转向油缸实现液力转向。两个转向油缸左、右各一个,转向油缸一端固定在对应侧台车架上,另一端与转向节(马达支座)连接,在遇到不平的路面时此结构可使油缸与转向节之间无相对运动趋势,油缸不会被憋压,有利于延长油缸的使用寿命。单侧的2个轮胎通过机械连杆连接,可实现机械同步转向。
1.2 液压电气控制结构
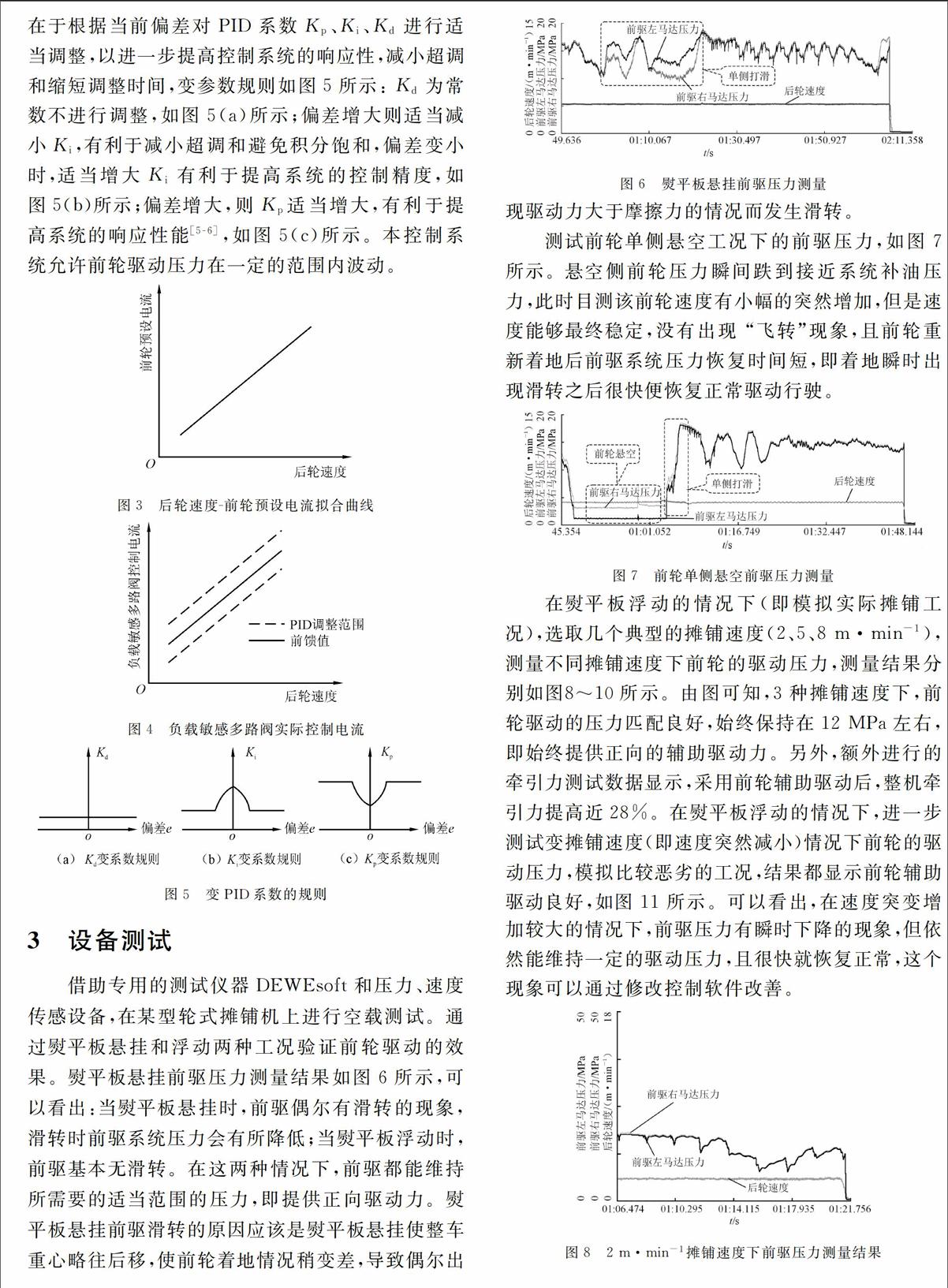
前驱动轮的液压驱动原理如图2所示。压力油源P由一个齿轮泵提供,左、右侧的驱动轮分别由2个定量马达直接驱动(无减速机),通过电比例信号调节负载敏感多路阀的开度来改变回路中流量的大小,从而实现前驱动轮的调速控制。2个前驱马达采用并联方式,为了避免某一侧驱动轮打滑或悬空导致流量集中流向该侧而出现越转越快的现象,设计分流阀进行强制分流。 压力传感器用于测量前驱压力。负载敏感多路阀集成封装有溢流阀,在设计中,要结合前轮最大驱动力设计指标、马达输出轴扭矩性能指标来设定系统的溢流压力值。
图2 前驱动轮液压驱动轮原理
2 前轮辅助驱动压力匹配控制
在摊铺模式下,如果启用前轮辅助驱动,则需确保其始终提供正向驱动力,不能产生负向寄生功率;当非摊铺模式或摊铺模式下不启用前轮辅助驱动时,为自由轮状态。在液压系统溢流压力设定好的前提下,前轮驱动压力越大,其提供的驱动力越大,可减少或避免前轮正常驱动过程中出现的打滑,减小轮胎磨损,确保正常使用寿命[3]。
如果采用前辅助驱动轮和后主驱动轮速度匹配的控制方式,即通过使前轮速度略大于或等于后轮速度来保证前轮的正向驱动力,此时,分别装在前、后轮驱动马达上的速度传感器,通过将测量的马达旋转角速度转换为轮胎的线速度进行速度闭环控制。但是,后轮充气压力的大小及前轮的磨损都会影响其旋转角速度与线速度之间的换算系数,换算系数的变化、前轮或后轮的滑转等诸多因素都会导致前轮匹配的速度失准,从而使其辅助驱动力产生变化,甚至变为阻力。
基于上述分析,本设计采用压力匹配控制方式,在前轮液压驱动系统中增加压力传感器,将压力检测的结果送到控制器内进行压力闭环控制,以维持前驱压力在适当范围内为控制目标,确保其始终提供正向驱动力。
鉴于在摊铺施工过程中操作手会根据现场实际情况增大或减小摊铺速度,也就是会出现变摊铺速度的工况,采取如下控制策略使前轮始终提供正向驱动力:在增速过程中,前轮加速度略大于后轮加速度;在减速过程中,前轮减速度略小于后轮减速度。
为了提高前驱系统的跟随性能,引入前馈加变参数PID的控制策略[4],如式(1)所示。
C=F+P(1)
式中:C为前驱负载敏感多路阀控制电流;F为前馈值;P为变参数PID计算结果。
前馈相当于根据系统的改变及时给予的一个修正量,在随动控制系统中,前馈使控制系统的响应特性获得很好的提高。在本设计中,前馈值根据“后轮速度-前轮预设电流”的拟合曲线直接计算得出,如图3所示。PID计算的输入为前轮实际压力与目标压力的偏差,对计算输出的结果进行适当限幅,以解决前轮滑转(或悬空)并越转越快和后轮滑转使前轮驱动力跟随减小的问题。负载敏感多路阀实际控制电流如图4所示,实线为前馈值,而虚线所包括的区域则为允许PID调整的范围。变参数PID的目的在于根据当前偏差对PID系数Kp、Ki、Kd进行适当调整,以进一步提高控制系统的响应性,减小超调和缩短调整时间,变参数规则如图5所示: Kd为常数不进行调整,如图5(a)所示;偏差增大则适当减小Ki,有利于减小超调和避免积分饱和,偏差变小时,适当增大Ki有利于提高系统的控制精度,如图5(b)所示;偏差增大,则Kp 适当增大,有利于提高系统的响应性能[5-6],如图5(c)所示。本控制系统允许前轮驱动压力在一定的范围内波动。
3 设备测试
借助专用的测试仪器DEWEsoft和压力、速度传感设备,在某型轮式摊铺机上进行空载测试。通过熨平板悬挂和浮动两种工况验证前轮驱动的效果。熨平板悬挂前驱压力测量结果如图6所示,可以看出:当熨平板悬挂时,前驱偶尔有滑转的现象,滑转时前驱系统压力会有所降低;当熨平板浮动时,前驱基本无滑转。在这两种情况下,前驱都能维持所需要的适当范围的压力,即提供正向驱动力。
图6 熨平板悬挂前驱压力测量
熨平板悬挂前驱滑转的原因应该是熨平板悬挂使整车重心略往后移,使前轮着地情况稍变差,导致偶尔出现驱动力大于摩擦力的情况而发生滑转。
测试前轮单侧悬空工况下的前驱压力,如图7所示。悬空侧前轮压力瞬间跌到接近系统补油压力,此时目测该前轮速度有小幅的突然增加,但是速度能够最终稳定,没有出现 “飞转”现象,且前轮重新着地后前驱系统压力恢复时间短,即着地瞬时出现滑转之后很快便恢复正常驱动行驶。
图7 前轮单侧悬空前驱压力测量
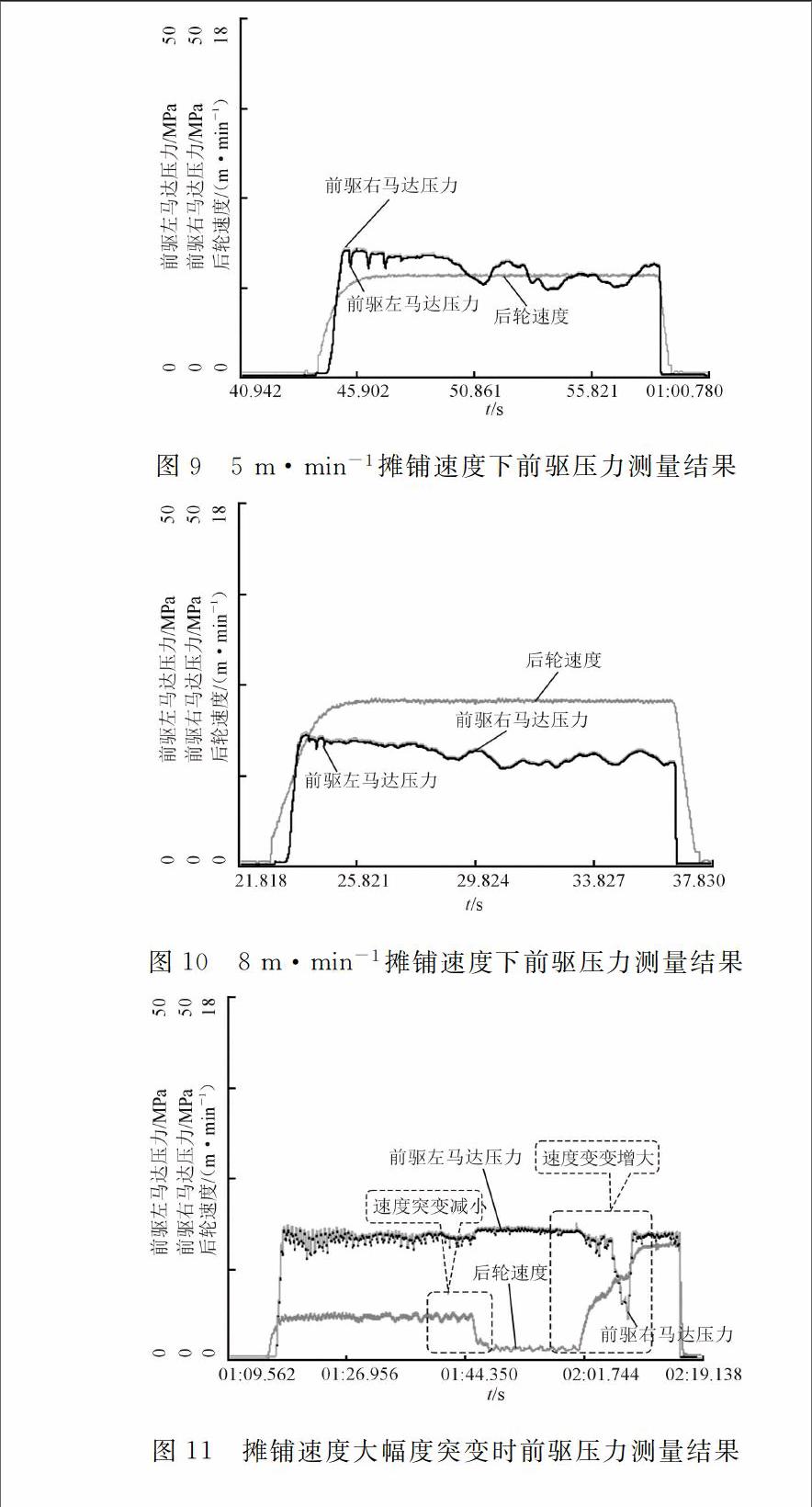
图8 2 m·min-1摊铺速度下前驱压力测量结果
在熨平板浮动的情况下(即模拟实际摊铺工况),选取几个典型的摊铺速度(2、5、8 m·min-1),测量不同摊铺速度下前轮的驱动压力,测量结果分别如图8~10所示。由图可知,3种摊铺速度下,前轮驱动的压力匹配良好,始终保持在12 MPa左右,即始终提供正向的辅助驱动力。另外,额外进行的牵引力测试数据显示,采用前轮辅助驱动后,整机牵引力提高近28%。在熨平板浮动的情况下,进一步测试变摊铺速度(即速度突然减小)情况下前轮的驱动压力,模拟比较恶劣的工况,结果都显示前轮辅助驱动良好,如图11所示。可以看出,在速度突变增加较大的情况下,前驱压力有瞬时下降的现象,但依然能维持一定的驱动压力,且很快就恢复正常,这个现象可以通过修改控制软件改善。
4 结 语
本文所设计的前轮辅助驱动系统已经在某型轮式摊铺机上投入使用,效果明显。桥式结构改善了前轮在复杂路面的附着情况。通过液压驱动结构和电气控制策略相结合,有效解决了速度匹配控制带来的前轮辅助驱动力变化大甚至产生负向寄生功率及易受各种因素影响的问题,同时解决了前轮打滑(或悬空)并越转越快的问题以及后轮打滑带来的前驱压力超高或偏低的问题,从而在各种工况下使前轮最大限度地发挥辅助驱动能力,大大降低了前轮滑转磨损。该前轮辅助驱动系统结构和控制思路具有一定的通用性及借鉴意义。
参考文献:
[1] 李 冰,焦生杰.沥青混凝土摊铺机与施工技术[M].北京:人民交通出版社,2007.
[2] 张中尧,李天富,费望龙.轮式摊铺机前轮电控辅助驱动改进方案[J].工程机械与维修,2011(3):160-161.
[3] 白志强.轮式摊铺机前轮驱动液压系统方案研究[J].筑路机械与施工机械化,2014,31(4):95-97.
[4] 宋 宝,唐小琦,蔡李隆.带滤波前馈的变参数PID调节器在伺服驱动中的运用[J].仪表技术与传感器,2008(12):81-82.
[5] 刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
[6] 段嫦娥.变参数PID控制器的探讨[J].重工与起重技术,2008(4):18-19.
[责任编辑:王玉玲]
猜你喜欢
客车技术与研究(2022年5期)2022-10-29
装备制造技术(2021年4期)2021-08-05
轮胎工业(2020年4期)2020-03-01
小学生学习指导·爆笑校园(2019年6期)2019-09-10
汽车实用技术(2016年10期)2016-11-21
汽车文摘(2014年9期)2014-12-13
中国自行车·骑行风尚(2014年4期)2014-10-10
