西门子MASTERDRIVES伺服的简要过程控制
2015-11-08 01:44韦才竞蒋丽艳
橡塑技术与装备 2015年14期
韦才竞,蒋丽艳
(桂林中昊力创机电设备有限公司,广西 桂林 541213)
MASTERDRIVES伺服是SIEMENS旗下一款老的伺服系统,一般在老设备改造中常用,因为少用,所以鲜为人知,在这里就简单介绍一下其通用的一些过程控制(以下将MASTERDRIVES伺服简称“MC”)。
1 调试软件
调试软件我们采用的DRIVEMONITOR_V5.5。
2 驱动器连接参数设定
将驱动器通过RS232通讯电缆连到调试电脑,打开调试软件DRIVEMONITOR_V5.5,点开工具栏TOOLS/ONLINE SETTINGS,选择通讯口COM及波特率(可以在设备管理器中查看或修改),其余为默认值,端口:X103。
3 驱动器参数在线
点开工具栏FILE/SET UP AN USS ONLINE CONNECTION……,点START按钮,如果通讯口及波特率设定正确的话,可以直接在线连接驱动器的参数。亦可通过新建文件名,如图1,选好后点OK钮进入主画面,再点图标 (将参数写到EPROM中,断电后参数不会丢失),如果通讯口及波特率设定正确的话,也可以直接在线连接驱动器的参数。

图1 驱动器参数在线设置画面
4 驱动器参数设定
(1)首次使用MC控制器或更换电机后,首先需进行参数的工厂恢复:点开工具栏PARAMETERS/PARAMETER LIST显示全部参数,P053=6(0000000000000110)——》P060=2——》P970=0对参数进行工厂恢复。
(2)使用SIEMENS标准电机时电机参数的设定:参数进行工厂恢复后显示r000=o005——》P071=400V(进线电压) ——》P095=1(电机类型选择) ——》P096=?(根据电机实际型号选择) ——》P130=2(选择编码器接口板) ——》P060=1——》驱动器显示 r000=o009——》 P060=3——》P367=3(选择工作模式为速度模式) ——》P368=2(选择控制命令源为固定设定值和端子控制) ——》P370=1(对电机参数开始进行初始化) ——》 P060=0,电机参数的设定完成。
(3)使用第三方电机时电机参数的设定:参考PDF手册《MC伺服控制器简明调试》,在此不再做说明。
(4)当P368=2(选择控制命令源为固定设定值和端子控制)时。
a.可通过软件DRIVEMONITOR_V5.5软面板启动。点开下面的三角符号,打开直接控制面板,点击使能键变成黄色,使能BIT1~6,选择SPEED为%,输入数值(范围为-200%~200%),要按回车键,速度值才能生效。再按启动按钮启动电机。
b.亦可通过外部端子启动,X101/8高电平为启动源,X101/5和X101/6组合成频率输出值。
c.通过直接面板控制CUMC基本定位功能。
基本定位功能参数的设定:设参数P060=7——》激活基本定位功能块的自由功能块U953.60=4——》U953.61=4——》U953.62=4——》设定参数将基本定位功能块与位置控制器连接P190=882——》P209=881——》P210=1——》设定编码器控制模块参数P174=885——》P175.1=889——》P175.2=890——》P179=890——》P647=3(零位开关接在端子X101/6(DI4),上升沿有效;如果零位开关接在端子X101/7(DI5)上,则改P648=3,上升沿有效。)。
打开基本定位功能区:点开下面的三角符号,打开直接控制面板,再点开菜单栏的,选择右边选择栏中的图标
进入基本定位功能控制区,点击基本定位功能控制区中的使能键变成黄色,此时直接控制面板使能键也变成黄色。
开启基本定位功能:当直接控制面板使能键变成黄色后,先使能BIT1~6,再启动装置(即启动BIT0),此时装置合闸使能上,基本定位功能控制区中的P211变绿,再点击钮P210使之变绿,则B220变绿,基本定位功能开启。
基本定位功能的速度模式:首先勾选EXPERT MODE,如下图所示,再选择方向后,设定速度值和加减速度值(最大值的%),再激活传送数据钮“SETPOINT TRANSFER ACTIVE”,启动按钮即可运行电机了。
基本定位功能的回零模式:1)首先要修改参数U866.010(回零方式选择REF_TYP)=B1(参考点为零位的方式)——》U866.011(正向回零软限位停是否有效)=B0(先选择无效,当选择B1有效时,需更改正向软限位U865.1的值)——》U866.012(负向回零软限位停是否有效)=B0(先选择无效,当选择B1有效时,需更改负向软限位U865.2的值)——》U866.014(选择回零方向)=B1(反向回零,当选择=B0时为正向回零)。
2)基本定位功能电机定长单位的计算及对应参数的修正:
C.5.2.1 进给常量的计算:以磁梁吸附电机为例:电机减速比为11.26,电机额定转速为3 000转/分钟,电机每转一圈产生4 096个脉冲,输出轴转一圈实测为520 MM,可以计算得出电机每产生一个脉冲输出轴所走的长度(UM)=(520×1 000UM)/(4 096×11.26)=11.27470027。
C.5.2.2 根据计算所得的进给常量修改参数P169=11(进给常量的整数,原为1),P170=27470027(进给常量小数点后的前八位,原为0)。
C.5.2.2 根据计算所得的进给常量修改最大速度及最大加减速参数:U856(最大速度)=12 288(默认值)×11.27470027=138 543(取整),亦可根据实际需要手动修正此参数;U857(最大加减速度)=204(默认值)×11.27470027=2 300(取整),亦可根据实际需要手动修正此参数。
3)基本定位功能电机运行参数的修正: 进入到基本定位功能控制区(如上图)。
C.5.3.1 点NEXT钮,进 入 到DRIVE CONFIGURATION界面输入轴的类型:LINEAR AXIS线性轴U585=0,选择单位为MM。
C.5.3.2 再 点NEXT钮 进 入 到REFERENCE POINT APPROACH界面,再点开HOMING MODE按钮选择回零方式:参考零位ZERO MARKER和回零方向:反向回零;
C.5.3.3 再点NEXT钮进入定位精度监控区,再点NEXT钮进入软限位位置设定区,设置好正负限位值;
C.5.3.4 设定完成后,可以选择按钮GENERATING SCRIPTFILE,系统会自动将设置好的参数生成脚本文件下载到装置中,参数即可生效;
C.5.3.5 再回到第一级界面CONTROL/OBSERVE栏,如上图,可进行回零及定位的直接控制了。
4)基本定位功能的回零启动: 进入基本定位功能控制区,如上图,选择回零方向BACKWARD变绿(反向回零),再选择回零模 式REF_TYPE(选第二栏REFERENCING OPERATION), 设定好速度值和加减速度值(最大值的%),再激活传送数据钮“SETPOINT TRANSFER ACTIVE”,启动按钮即可运行开关回零了。
5)基本定位功能的定位模式:参数的设定同C.5,在此不再做具体的解释了.进入基本定位功能控制区,首先执行电机回零后,选择定位模式(绝对定位还是相对定位)如果走绝对定位就不需选择运动方向了,如果是相对定位,则需选择运动方向;输入定位位置值及速度值和加减速度值(最大值的%),再激活传送数据钮“SETPOINT TRANSFER ACTIVE”,启动按钮即可运行电机走定长了。
(5)当P368=6(选择控制命令源为总线控制)时,端口:SLOT A——CBP2,修改参数P918.1=CPU中给定的总线地址。
A、纯速度模式下的总线控制:CPU中配置控制字时为2个:PPO TYPE 3,PZD-2/2,第一个为控制字(状态字反馈),第二个为速度字(速度反馈)。
A.1、控制字的给定(可通过参数R550监控控制字的每一个位是否通过总线送过来):链接功能块为B表示的是位链接,K表示的是单字链接,KK表示的是双字链接。
A.1.1、控制字1的BIT10 ——》通过程序置1(总线开启);
A.1.2 控制字1的BIT0——》链接到驱动器的B3100(改参数P554= B3100) (启动位);
A.1.3 控制字1的BIT1~6——》链接到驱动器的B1(置1,改参数P555~P564= B1,或链接到B3101~B3106,通过程序置1);
A.1.4 控制字1的BIT7——》链接到驱动器的B3107(改参数P566= B3107) (复位位);
A.1.5 控制字1的BIT11——》链接到驱动器的B3111(改参数P571= B3111) (选择正向运行);
A.1.6 控制字1的BIT12——》链接到驱动器的B3112(改参数P572= B3112) (选择反向运行)。
A.2、速度源的给定:为第二个控制字——》链接到驱动器的K3002(K3002后的数字2表示为通讯字的第二个字,改参数P443= K3002);
A.3、电机走纯速度模式运行:BIT10首先置1——》BIT1~6再置1——》BIT11(或12)置1——》MOVE速度值到第二个控制字中(十六进制的4000或十进制的16384对应额定速度3000转/分钟) ——》BIT0再置1就能运行电机了。
B、CUMC基本定位功能的总线控制:CPU中配置控制字时为14个(前4个字是给PIV,不参与控制,参与控制的PZD为10个字):PPO TYPE 5,PIV+PZD-10/10,PZD的第1个字为基本控制字(状态字反馈),,PZD的第2个字为基本定位功能控制字(基本定位控制字反馈),PZD的第3个字为速度字(速度反馈),PZD的第4~5个字为位置字(位置反馈)。进给常量的计算可参考上述介绍的4.4.3.5的第三点:基本定位功能电机运行参数的修正。
B.1、第一个控制字的给定:PZD的第1个字(可通过参数R550监控控制字的每一个位是否通过总线送过来)合闸使能后R550为:1001110001111111。
B.2、第二个控制字的给定:
B.2.1、控制字2的BIT0 ——》链接到驱动器的B3200(改参数U866.2= B3200) (REF_ON回零启动);
B.2.2、控制字2的BIT1 ——》链接到驱动器的B3201(改参数U866.3= B3201) (POS_ON定位启动);
B.2.3、控制字2的BIT2 ——》链接到驱动器的B3202(改参数U866.4= B3202) (SETUP_ON速度控制启动);
B.2.4、控制字2的BIT3 ——》链接到驱动器的B3203(改参数U866.5= B3203,也可根据实际应用情况直接链接到B0或B1而不通过CPU的BIT3控制) :(POS_TYP定位模式,B0=相对定位,B1=绝对定位 ,);
B.2.5、控制字2的BIT4 ——》链接到驱动器的B3204(改参数U866.6= B3204) (D_FWD速度控制时选择正向运行);
B.2.6、控制字2的BIT5 ——》链接到驱动器的B3205(改参数U866.7= B3205) (D_BWD速度控制时选择反向运行);
B.2.7、控制字2的BIT6 ——》链接到驱动器的B3206(改参数U866.8= B3206) (SPV_RIE,当SPV_RIE_TYP=0时, SPV_RIE上升沿到,数据刷新一次);
B.2.8、控制字2的BIT7 ——》链接到驱动器的B3207(改参数U866.9= B3207也可直接链接到B1而不通过CPU的BIT7控制) (SPV_RIE_TYP数据刷新方式,当SPV_RIE_TYP=0时, SPV_RIE上升沿到,数据刷新一次; 当SPV_RIE_TYP=1时, 数据刷新为连续装入);
B.2.9、控制字2的BIT8 ——》链接到驱动器的B3208(改参数U866.10= B3208也可直接链接到B1而不通过CPU的BIT8控制) (REF_TYPE回零方式 ,当 REF_TYPE=0 时 , HOMING ON THE FLY; 当REF_TYPE=1时, 参考点回零方式);
B.2.10、 改参数 U866.11= B1(REF_FWD_STOP正向软限位停,当=B1时, 需更改正向软限位U865.1的值大于0;当=B0时,不受正向软限位控制);
B.2.11、 改参数 U866.12= B1(REF_BWD_STOP反向限位停,当=B1时, 需更改反向软限位U865.2的值小于0;当=B0时,不受正向软限位控制);
B.2.12、控制字2的BIT12 ——》链接到驱动器的B3212(改参数U866.14= B3212也可直接链接到B1而不通过CPU的BIT8控制) (REF_D回零方向,当 REF_D=0时 , 为正向回零 ; 当REF_D=1时, 为反向回零)。
B.3、速度源的给定:PZD的第3个字——》链接到驱动器的K3003(改参数U868= K3003);
B.4、位置源的给定:PZD的第4~5个字——》链接到驱动器的KK3034(改参数U867= KK3034);
B.5、基本定位功能中的速度控制:首先合闸使能第一个控制字,R550显示为:1001110001111111后——》MOVE速度值到第三个控制字中(十六进制的4000或十进制的16384对应额定速度3000转/分钟) ——》控制字2的 BIT7置1(数据刷新为连续装入) ——》控制字2的BIT2置1(速度控制启动) ——》控制字2的BIT4或BIT5置1(选择速度控制启动方向)即可运行电机了。
B.6、基本定位功能中的回零控制:
B.6.1、U866.011(正向回零软限位是否有效)=B0(先可以选择无效,当回零后再选择B1有效,需更改正向回零软限位U865.1的值大于零);
B.6.2、U866.012(反向回零软限位是否有效)=B0(先可以选择无效,当回零后再选择B1有效,需更改正向回零软限位U865.2的值小于零);
B.6.3、检查零位开关接线端子X101/6(DI4)上升沿是否有效;
B.6.4、首先合闸使能第一个控制字——》MOVE回零速度值到第三个控制字中(十六进制的4000或十进制的16384对应额定速度3000转/分钟)——》控制字2的 BIT8置1(回零模式为参考点回零) ——》控制字2的 BIT7置1(数据刷新为连续装入)——》控制字2的 BIT12置1(回零反向反向回零)——》控制字2的 BIT0置1(回零启动),此时执行回零到回零开关停下,当前位置值为0后,再断开控制字2的 BIT0,回零已完成。
B.7、基本定位功能中的定位控制:
操作回零后,可选择控制字2的 BIT3置1(绝对定位)——》首先合闸使能第一个控制字——》MOVE定位速度值到第三个控制字中(十六进制的4000或十进制的16384对应额定速度3000转/分钟)——》MOVE定位位置值到第4~5个控制字中——》控制字2的 BIT7置1(数据刷新为连续装入) ——》控制字2的 BIT1置1(定位启动),即可执行基本定位功能中的定位控制了。
(6)如何改变CUMC驱动电机的方向:
可以采用以下方法:
a.传统方法:改变电机的任意两相进线相序,从而改变电机的磁场方法,就可以实现转向的改变。当使用编码器闭环模式时需要同时改变编码器的极性。
b.使用参数:P595=0 顺时针磁场,当设定值为正向时,电机顺时针运行
P595=1 逆时针磁场,当设定值为正向时,电机逆时针运行
因此,当需要将电机的运行方向改变时,更改P595即可实现。
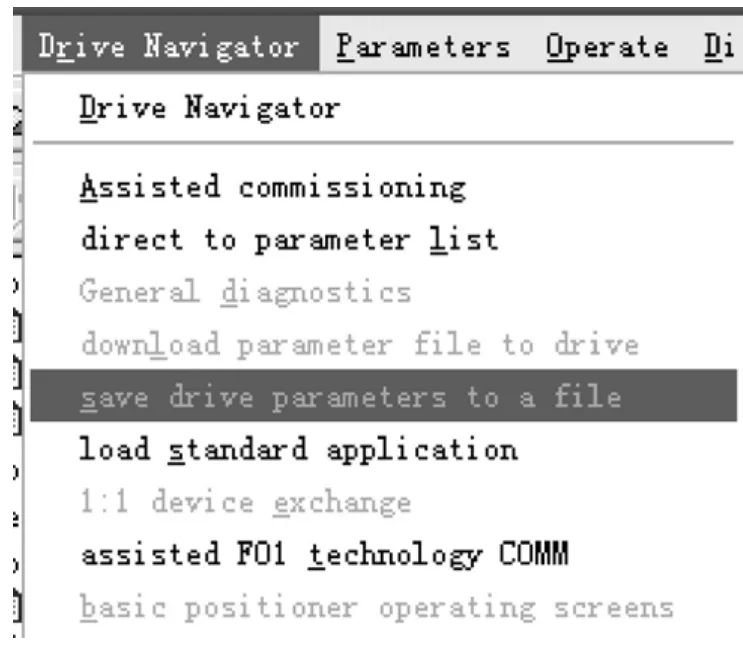
图2 保存文件示意
设定步骤:P060=5>>>595=?>>>P060=1or7
(7)在线参数怎样保存到硬盘文件
如图2所示,通过此项保存可将在线的驱动器参数值保存到我们的电脑硬盘,以便离线时查看驱动器参数值。
[1]《MC伺服控制器简明调试》.
[2]《如何改变CUMC驱动电机的方向》.
[3]《CUMC基本定位功能简明调试》.
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
北华大学学报(自然科学版)(2021年3期)2021-07-13
电脑爱好者(2020年6期)2020-05-26
哈尔滨轴承(2020年4期)2020-03-17
猪业科学(2018年4期)2018-05-19
新能源科技(2018年1期)2018-02-17
中国化肥信息(2018年3期)2018-01-30
北京航空航天大学学报(2017年5期)2017-11-23
知识经济·中国直销(2017年3期)2017-04-16
现代企业(2015年4期)2015-02-28