万米级潜水器科考母船“张謇”号设计研究
2015-12-09 07:00陈卫华
海洋工程装备与技术 2015年4期
文 勇,王 楠,陈卫华,陈 浩,王 爽
(上海航盛船舶设计有限公司,上海 200011)
万米级潜水器科考母船“张謇”号设计研究
文 勇,王 楠,陈卫华,陈 浩,王 爽
(上海航盛船舶设计有限公司,上海 200011)
简要介绍了上海航盛船舶设计有限公司自主开发设计的万米级潜水器科考母船“张謇”号的设计背景及主要性能参数。主要叙述了该船设计过程中对总体布置、型线优化、浮态控制、动力定位能力等关键技术的设计研究。
船舶设计;科考母船;型线;浮态控制;动力定位
0 引 言
2015年4月18日,国内首艘万米级潜水器科考母船“张謇”号正式开建,建成后将成为我国11000m载人深渊器“彩虹鱼”及其系列产品的科考母船,承担深渊科学调查研究任务[1]。同日,全比例的“彩虹鱼”载人深渊器概念模型在上海海洋大学深渊科学技术流动实验室首次与公众见面。
“张謇”号由上海彩虹鱼科考船科技服务有限公司投资、上海航盛船舶设计有限公司设计、浙江天时造船有限公司建造。该船计划于2016年3月1日下水、5月30日试航、6月30日交付使用。
“张謇”号首次将万米级载人潜水器母船、远洋科学综合考察、深海工程作业支持三个功能有机地结合在一起,设计上极具创新性。该船建成后主要可承接以下作业:(1)为11000m潜水器系列产品(包括3台万米级着陆器、1台万米级无人潜水器和1台万米级载人潜水器)的海试和作业提供支持;(2)深渊科学调查研究的海上移动实验室;(3)一般性深海海洋科学调查研究(包括深远海物理海洋、地球物理、海洋化学、海底地质、海洋生物等学科的调查研究)的海上移动实验室;(4)新研发海洋调查仪器设备的海试平台;(5)海洋油气工程设施、海底电力通信设施、海洋环境监测设施的水下安装、 检测和维修服务;(6)海洋事故的救援和打捞等;(7)海底探险和海上休闲旅游;(8)海底考古和深海电影拍摄。
本文将对“张謇”号的总体设计做简要介绍,以期为将来类似任务提供参考。
1 船舶概况
“张謇”号是一艘钢质、无限航区航行的万米级潜水器支持母船兼深海综合调查作业船,排水量约4800t。考虑到科考船工况多的特点[2],该船巧妙搭配主机,采用双机单桨形式,大主机额定功率2380kW,小主机额定功率1103kW,2台主机不同时运行。小主机的设置让该船在实际运营时更具备可靠性、经济性和灵活性。设有两台额定功率为750kW的主柴油发电机组、1台额定功率1600kW的轴带发电机。为增强船舶机动性,实现科考作业所需的DP1定位能力要求,艏部设有2台560kW艏侧推,艉部设1台680kW艉侧推。该船效果如图1所示。

图1 “张謇”号效果图Fig.1 Impression drawing of “Zhangjian”
该船的主要船型参数如表1所示。
根据设计任务书要求,进行全船总的功能区域划分,主要分为艏部锚泊作业区、人员生活区、实验室区、潜水器机库区、作业甲板区、机舱区、绞车舱区、辅助设备区、声学设备区、艏艉侧推区等。并在此基础上进行全船的布置:人员生活区的居住舱室及配套舱室和设施的布置满足60人的需要;声学设备及配套舱室的布置,在竖向和水平向尽可能接近;潜水器机库满足11000m载人潜水器储存舱的要求;后甲板作业面积580m2;全船设置8道水密横舱壁,满足破舱稳性计算的要求;艏艉设置较大的压载舱,满足调节船舶浮态和吃水的需要。
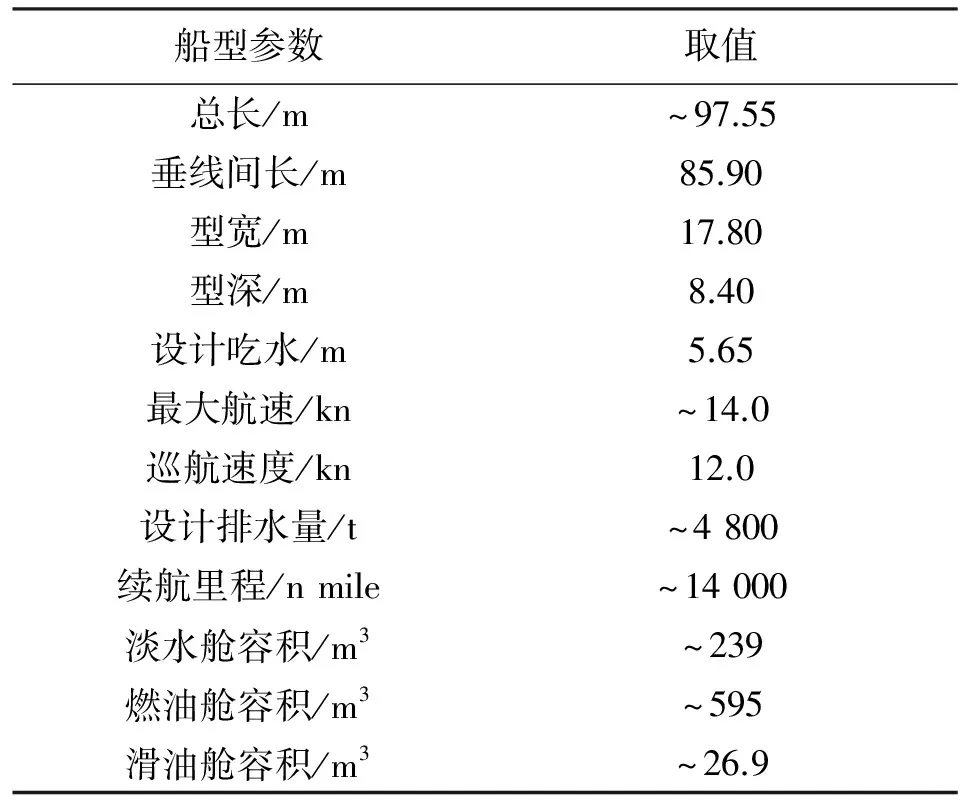
表1 “张謇”号主要船型参数
该船总体布置如图2所示。
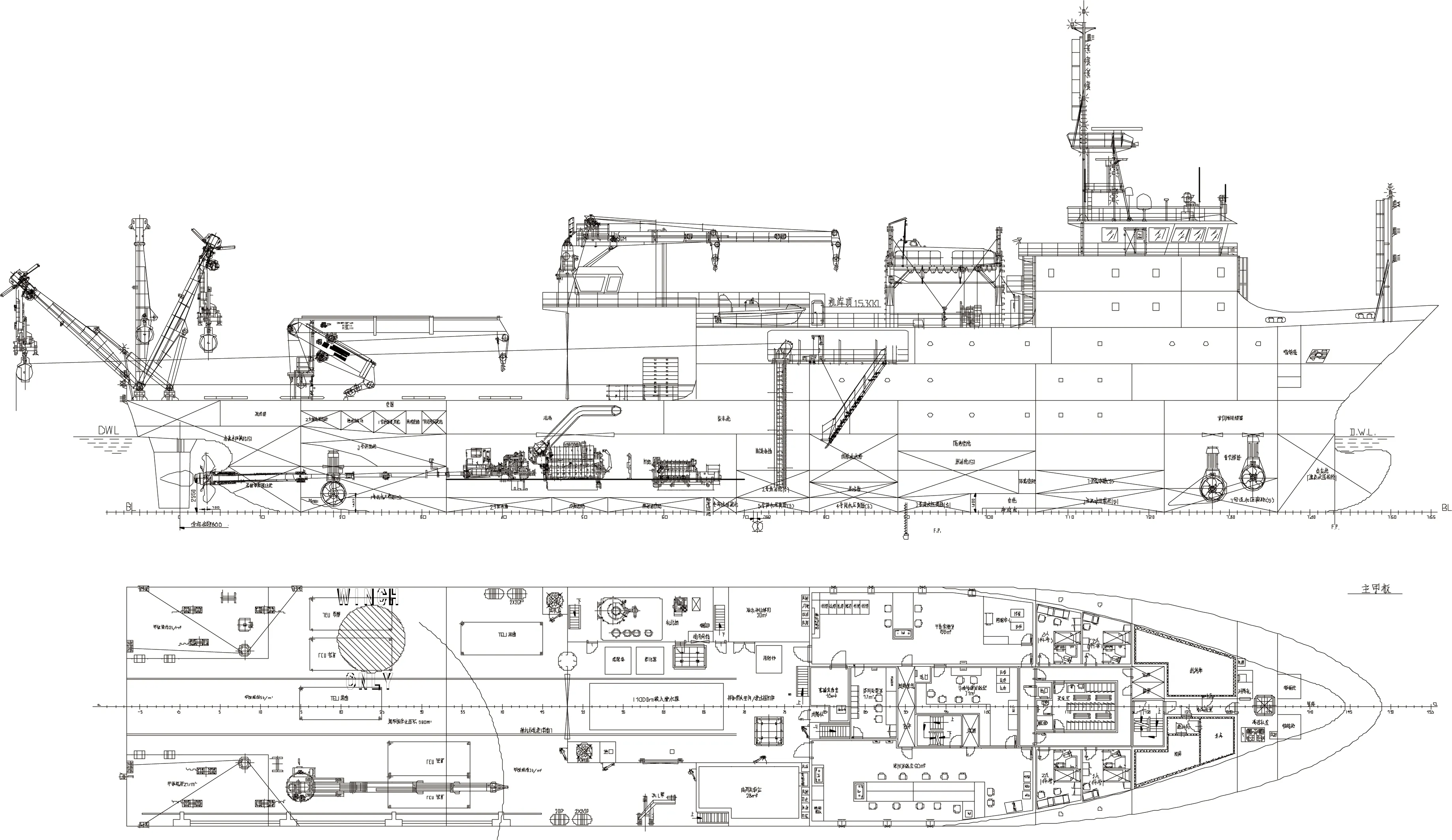
图2 “张謇”号总体布置Fig.2 General arrangement of “Zhangjian”
2 关键技术的设计研究
2.1船体线型
该船为科考船,排水量逾4800t,双机单桨配置,且需按DP1定位能力要求配置680kW的艉侧推。这几个条件的叠加决定了型线开发和优化是该船的难点和重点。
该船型线的开发和优化主要从以下几个方面考虑。
(1) 艉侧推的布置。该船单艉轴,艉侧推只能布置在艉轴上方或下方。若布置在艉轴上方,侧推装置距离水面较近,易吸入空气而影响侧推效果;若布置在艉轴下方,艉轴需抬高至一定高度且施工难度较大,同时也影响了主机和齿轮箱的布置。
艉侧推的位置越靠前,越有利于艉部伴流,但所需的功率越大,从而侧推筒体直径也越大;越靠后,越有利于动力定位,但对艉部伴流的均匀性有较大的负面影响。
最终综合考虑后,艉侧推置于艉轴下方FR19处。
(2) 声学设备布置。该船配有全海深多波束系统、浅地层剖面仪、声学多普勒流速剖面仪(ADCP)等声学设备,其中多波束系统采用嵌入式安装,即与船底齐平,在保证其安装的前提下,尽量减小平底区域的面积,以利于艏部型线优化。
(3) 耐波性和稳性。科考船的型线开发必须兼顾耐波性和稳性的要求。该船为了调和耐波性与稳性之间的矛盾,适当减小了舭部半径,使得浮心下移,同时适当下调设计吃水,增加水线面面积,维持排水量不变,这使得该船初稳性高度下降,耐波性最主要的指标横摇周期增大,同时大倾角稳性有所提高,增加了稳性的裕度。
艏部的型线对纵向运动影响较大。为了改善耐波性,采用了前倾艏柱,设计水线接近平直,水线以上适度外飘,这样有利于减少纵摇、垂荡和波浪中的失速。
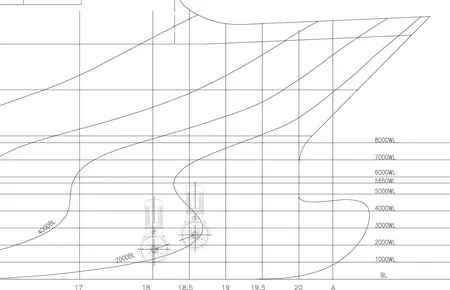
图3 艏部线型Fig.3 Hull form of bow
(4) 软件计算和船模试验论证。该船在型线优化过程中使用SHIPFLOW软件进行了多次的计算流体力学(CFD)阻力计算,根据软件计算的结果来优化艏部和艉部的线型,从而最终确定本船的型线。经船模试验论证,本船优化后的型线满足快速性的相关要求。表2给出了静水阻力系数计算结果,表中Ct为总阻力系数。船模试验结果如表3所示,表中VS为航速,Crs为剩余阻力系数,Cts为总阻力系数,Rs为总阻力,PES为有效马力。
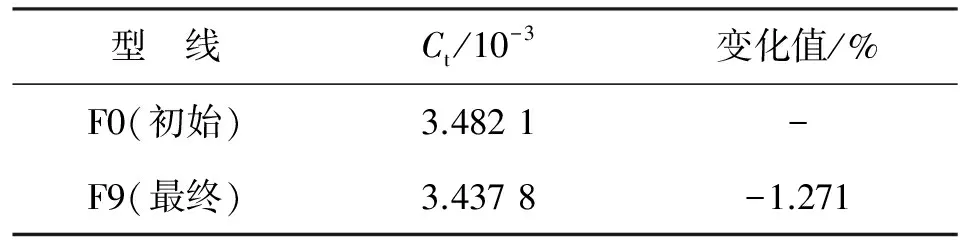
表2 静水阻力系数比较(软件计算值,航速12 kn)
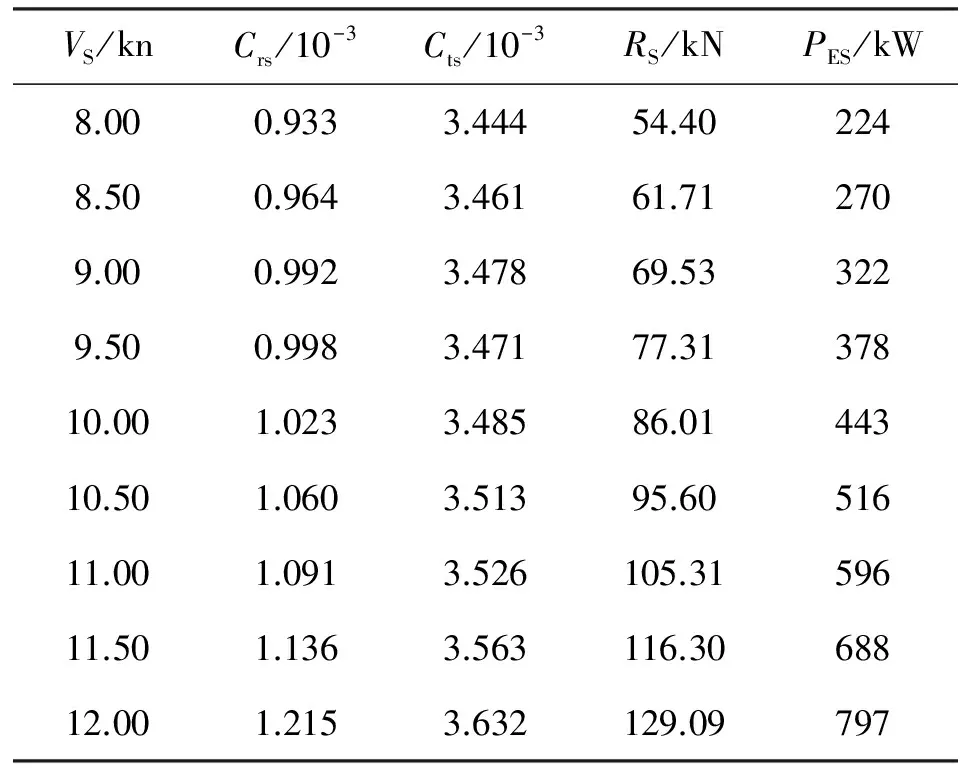
表3 静水阻力系数(船模试验值)
2.2 浮态及稳性
浮态控制是该船总体设计的难点之一。由于该船上层建筑设在艏部,空船重心位于舯前,而实船航行时需要有一定的艉倾,因此调整浮态主要从以下几个方面着手。
(1) 设计线型时,在兼顾耐波性和稳性的前提下,适当将浮心前移。
(2) 在分舱布置时,将消耗液舱(燃油舱和淡水舱)尽量艏艉对称布置,保持油水舱总的重心位置在船舯附近,这样可以使得出、到港工况油水消耗前后船舶的浮态不会发生大的变化,同时为了方便调整纵倾,在艉部设置较大的艉压载水舱,以防止艏倾过大。
(3) 各专业的设备尽量靠后布置。
(4) 该船为满足吃水和稳性要求,需要配载数百吨的压载水,因而通过合理的压载水调拨方案可以随时有效地调整全船浮态。
该船完整稳性满足MSC.267(85) 所采纳的《2008 完整稳性规则》(2008 IS CODE)及国际海事组织(IMO)《国际特殊用途船舶安全规则》、现行的《船舶与海上设施法定检验规则》及其修改通报对无限航区特种用途船的要求。破舱稳性满足《1974年国际海上人命安全公约》及MSC.266(84) 决议的相关衡准要求。
该船主要的载重量来自燃油、淡水以及为满足浮态稳性而要求的压载水,全船有几十个液体舱。为了提高稳性指标,在分舱布置时尽量将液舱靠下布置,降低全船的重心。
为满足破舱稳性要求,全船设8道水密横舱壁,且液舱设2道纵舱壁,一方面提高分舱指数,另一方面降低液体的自由液面惯性矩,有利于完整稳性指标的提高。
2.3 抗风能力
按照港湾、沿海、近海和远洋的船舶航区分级,远洋级公务船和调查船等除必须满足IMO的稳性衡准(包括气象衡准)外,往往因其区别于普通国际航行运输船的特殊性,还需满足我国国内针对此类船型对于抗风力的特殊要求,主要有中华人民共和国船舶行业标准CB/T 3526—94《海洋调查船特殊抗风力要求》,以及国军标GJB 4000—2000[3]。
对该船而言,主要从如下几个方面来考虑:(1)保证动稳性曲线截止的角度范围内不出现非保护性开口;(2)设置较大面积的舭龙骨,有效减少横摇角,增大动稳性臂;(3)优化船舶重量重心分布,降低船舶重心,有利于动稳性曲线整体提高,有利于抗风衡准;(4)适当降低生活舱室的层高。
通过上述措施和对总布置的不断优化,该船满足CB/T 3526—94对海洋调查船的相关要求。
2.4 船体结构设计及振动分析
该船在结构设计方面主要采取了如下措施。
(1) 总纵抗弯及重量重心优化设计。该船压载工况时中拱比较明显,对船体梁纵向弯曲强度、刚度要求较高。另外由于船舶尺度及线型关系,该船重心必须尽量降低以确保其稳性。通过方案对比,该船主甲板采用纵骨架式,船底外板及内底板适当加厚。这样在改善船体梁纵向结构强度、提高抗屈曲能力的同时,又在一定程度上改善了空船的重心分布。
(2) 长轴区域结构优化设计。该船机舱比较靠近船舯,主推进轴比较长,同时具有艉部重量大、线型瘦、浮力小、船体梁剖面小等特点,容易使长轴产生挠度变形。结构设计根据该船实际布置情况,主甲板采用纵骨架式,同时在该区域设置了连续纵舱壁,有效地保证了该区域结构的强度及刚度,避免因船体变形而导致长轴的挠度变形。经过计算分析,所采用的结构形式达到了控制长轴变形的目的。
(3) 船体振动控制。由于部分科考作业对船舶振动比较敏感,因此该船的结构设计相对于常规船舶更加重视对船舶振动的控制和优化。该船的振动控制从总振动和局部振动两方面进行考虑,振动衡量标准参照GB/T 7453—1996《船体振动测量》。局部振动考虑船尾螺旋桨脉动压力作用区的振动,同时考虑机舱振动、甲板室振动和桅杆振动。
根据上述设计思路,通过线型优化及结构形式的合理布置,借助有限元分析预报手段进行校核、优化,使船体振动满足衡量标准的要求。振动分析有限元模型如图4所示。
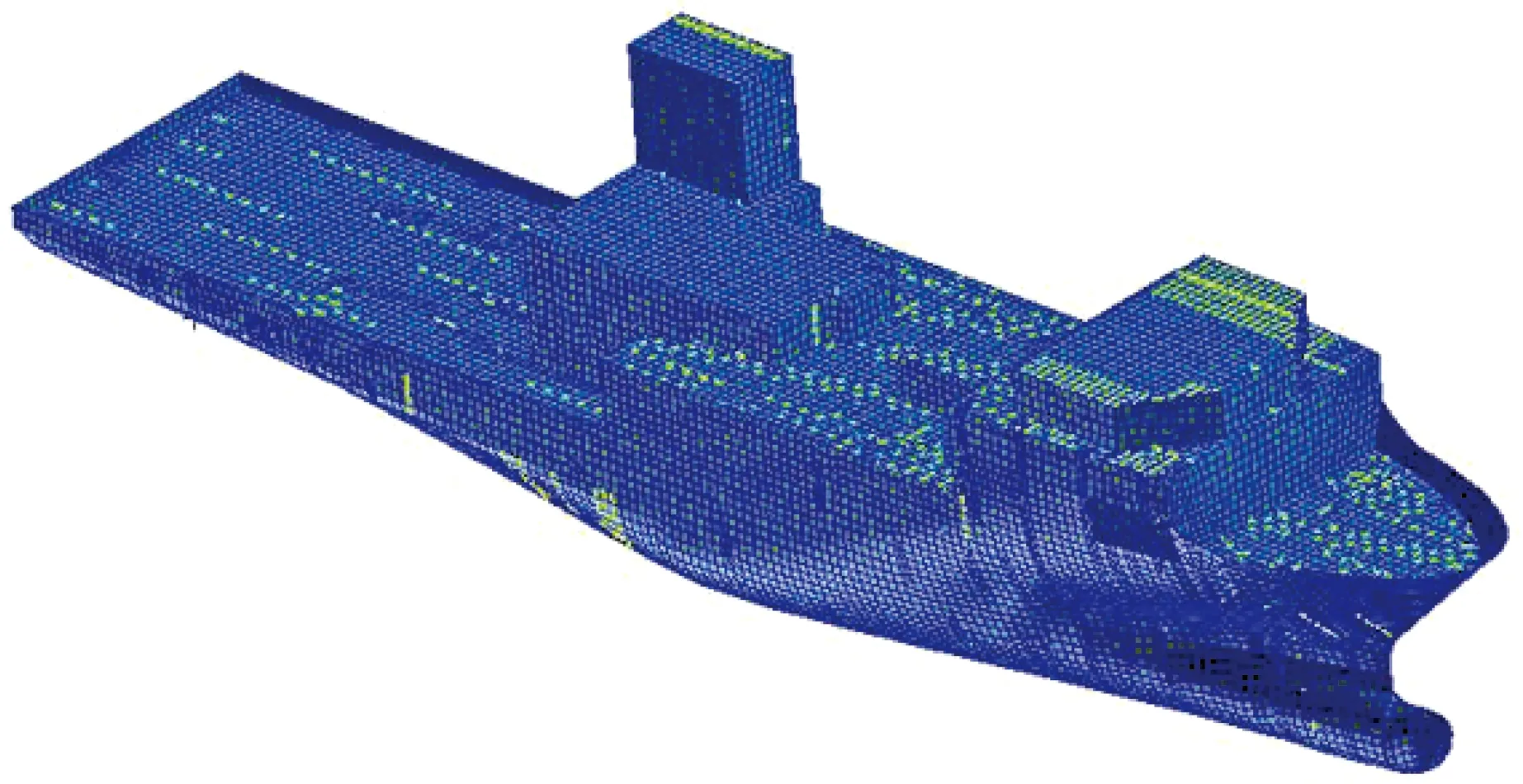
图4 振动分析有限元模型Fig.4 Finite element model of vibration
2.5 动力定位
根据上海海洋大学深渊科学与技术中心《11000米着陆器、无人潜水器、载人潜水器对母船要求》文档,该船动力定位能力应满足:无人潜水器进入水下后,母船要有一定定位能力,在3级工作海况下要求母船漂移半径均方差不大于15 m;载人潜水器布放入水和回收时需要母船要有一定定位能力,按照DP1动力定位。
由此可见该船主要科考作业对动力定位能力的要求并不高。为了有效控制初期投资,保证营运的经济性,通过多番论证计算,该船采用了双机单桨形式,动力定位工况下投入使用的推进设备包括:主推进1台,可调螺距螺旋桨,由2 380 kW的大主机驱动;艏侧推2台,可调螺距螺旋桨,由560 kW的电动机驱动;艉侧推1台,可调螺距螺旋桨,由680 kW的电动机驱动。
“张謇”号动力定位能力分析如图5所示。结果显示,该船在流速1.5 kn、侧风侧流时定位能力是比较差的,此时瓶颈在艉侧推。这也是单桨船型在动力定位方面存在的一个先天不足。
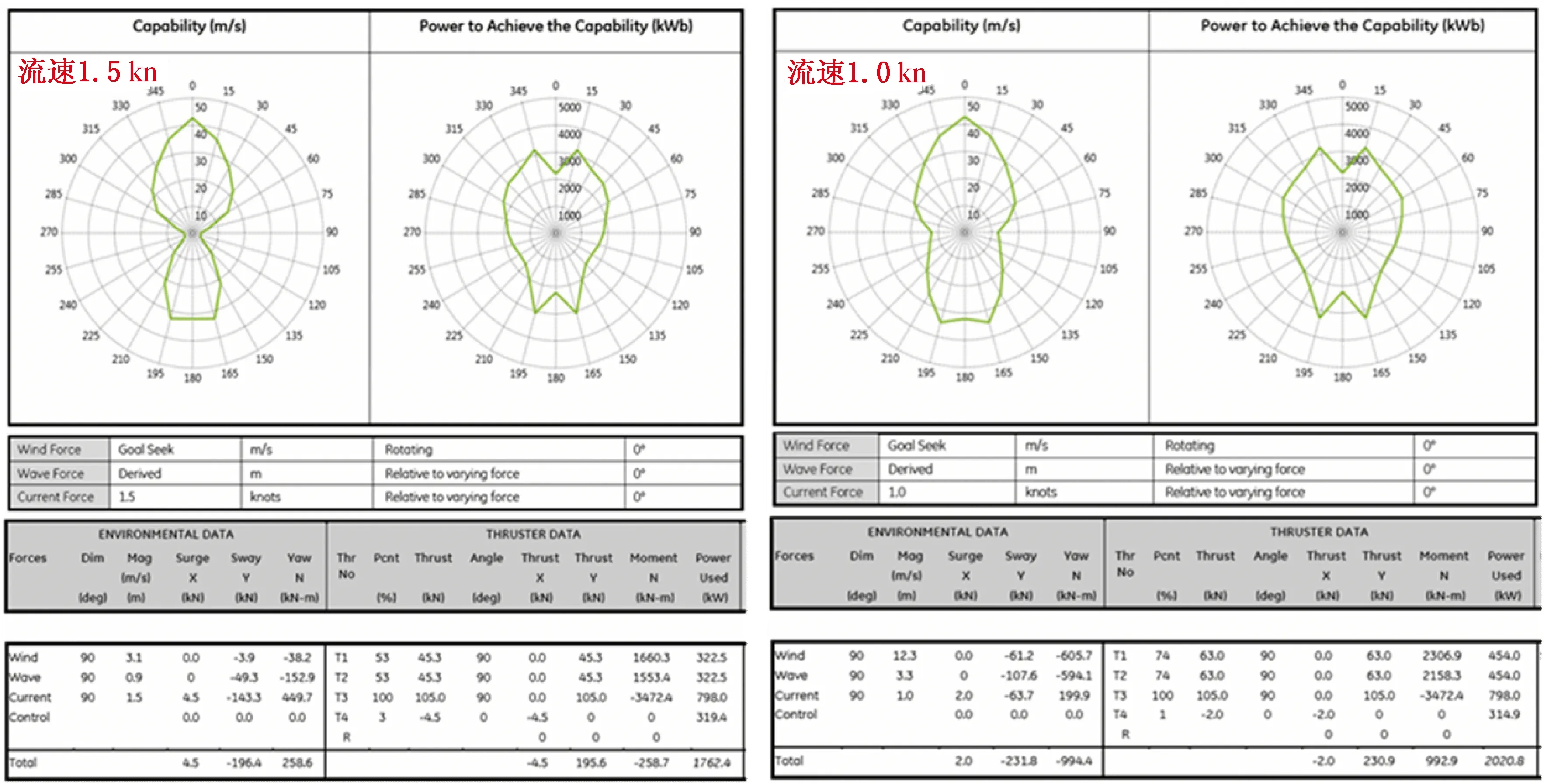
图5 “张謇”号动力定位能力Fig.5 Dynamic positioning capacity of “Zhangjian”
考虑到该船在实施主要科考作业时不需要工作在自动定位模式(即自动保持要求的位置和艏向),故可在满足作业需要的前提下选择自动艏向模式(即绕某一设定点根据风向适时自动调整船舶艏向)、自动区域定位模式(即在最小能耗条件下自动将船舶保持在允许区域内,并将艏向保持在允许的艏向范围内),以实现较恶劣环境条件下的定位并降低能耗[4]。
3 结 语
“张謇”号作为远洋科学调查船,由于其特殊的定位和功能需求,在总体布置、稳性、抗风能力和动力定位能力等方面都有特殊要求,同时需要兼顾快速性、营运经济性等指标,这些都给整船设计带来了巨大的挑战。在该船设计过程中,充分听取了相关领域专家和科研院所的意见、建议,各项性能指标得到了较好的平衡。目前该船主船体建造工作已基本完成,相关性能指标将在后续实船试验和使用过程中得到进一步的验证。
[1] 人民日报. 国产万米级深渊器母船开建“彩虹鱼”首曝光[N]. 人民日报,2015-04-20(5).
[2] 唐军. 海洋科学考察船的作业方式及避让[J]. 航海技术,2008(1):20.
[3] 吴刚,刘巍,曲宁宁. 远洋级公务船与调查船的抗风力研究[J]. 船舶工程,2013(1):19.
[4] 边信黔,付明玉,王元慧. 船舶动力定位[M]. 北京:科学出版社,2011.
ReviewontheDesignof10000-mScaleScientificInvestigationMotherShip“Zhangjian”
WEN Yong, WANG Nan, CHEN Wei-hua, CHEN Hao, WANG Shuang
(HansailMarine&OffshoreDesignCo.,Ltd.,Shanghai200011,China)
We briefly introduce the background of the development and design as well as the main performance parameters of the 10 000-m scale scientific investigation mother ship “Zhangjian” independently designed by HANSAIL. We mainly introduce the key technical points solved during design, such as the general arrangement, hull form optimization, flotation control and dynamic positioning capacity, etc.
ship design; scientific investigation mother ship; hull form; flotation control; dynamic positioning
U674.81
A
2095-7297(2015)04-0270-05
2015-08-11
文勇(1982—),男,工程师,主要从事船舶设计方面的研究。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
文史春秋(2022年4期)2022-06-16
南通职业大学学报(2022年1期)2022-06-02
辽宁丝绸(2022年1期)2022-03-29
船舶标准化工程师(2019年5期)2019-11-11
中国军转民(2017年9期)2017-12-19
对联(2016年5期)2016-05-30
哈尔滨工程大学学报(2015年6期)2015-06-24
天津职业院校联合学报(2014年2期)2014-09-20