考虑空泡的空投航行器入水弹道研究
2015-12-23 05:38邬明
兵器装备工程学报 2015年3期
关键词:空泡
【装备理论与装备技术】
考虑空泡的空投航行器入水弹道研究
邬明
(中船重工第七一○研究所,湖北 宜昌443003)
摘要:在分析有关资料的基础上,对某型航行器的入水弹道进行了详细计算。在考虑入水空泡的基础上,建立了入水过程的运动学和动力学模型,在Matlab环境下进行了仿真计算,求解了航行器带空泡航行阶段的流体动力,给出了2种外形航行器在2种典型工况下的入水深度、姿态和速度随时间的变化。结果表明,展开翼对航行器的空泡段时间影响不大,对入水弹道有非常明显的影响。
关键词:空投航行器;水下弹道;空泡;系统仿真
收稿日期:2014-10-20
作者简介:邬明(1985—),男,硕士,工程师,主要从事水下航行体流体力学研究。
doi:10.11809/scbgxb2015.03.007
中图分类号:TJ611.1
文章编号:1006-0707(2015)03-0023-05
本文引用格式:邬明.考虑空泡的空投航行器入水弹道研究[J].四川兵工学报,2015(3):23-27.
Citationformat:WUMing.ResearchonWaterEntryandUnderwaterTrajectoryofanAirborneVehiclewithConsiderationofCavity[J].JournalofSichuanOrdnance,2015(3):23-27.
ResearchonWaterEntryandUnderwaterTrajectoryof
anAirborneVehiclewithConsiderationofCavity
WUMing
(No.710ResearchInstitute,ChinaShipbuildingIndustryCorporation,Yichang443003,China)
Abstract:On the basis of analyzing the relevant information, the paper calculated underwater trajectory of a certain type of airborne vehicle in detail. On the basis of considering entry cavity, we established the kinematics and dynamics model of the water process, and the simulation calculation was carried out in Matlab environment on solving the aircraft with cavity navigation phase fluid power, and two kinds of shape craft under two typical conditions of the water depth, posture and speed change over time were given. The results show that the spread wings of the airborne vehicle has a little influence on cavity time and has a very obvious effect on water ballistic.
Keywords:airbornevehicle;underwatertrajectory;cavity;simulation
空投航行器在入水时面临着极其巨大的流体作用力,它是一个非常复杂的问题,无论时理论研究还是工程应用都涉及许多其他学科,例如物理学、流体力学、材料力学等,航行器入水冲击载荷及入水弹道的精确分析,对研究航行器入水具有十分重要的意义。
严忠汉、潘光等人对空投鱼雷和水雷进行了系统的仿真分析,初步设计出了入水弹道[1-2];李兵等人对空投航行器入水冲击力进行了详细计算[3];国内部分学者对水下滑翔机的运动特性进行了细致分析[4-5]。在此基础上,重点研究了航行器的入水弹两种条件的入水弹道进行了计算。针对展开翼对弹道影响的问题,考虑入水空泡的影响,分别对无展开翼和有展开翼给出了2种航行器的外形示意图(如图1、图2所示),其排水量小于其重力。
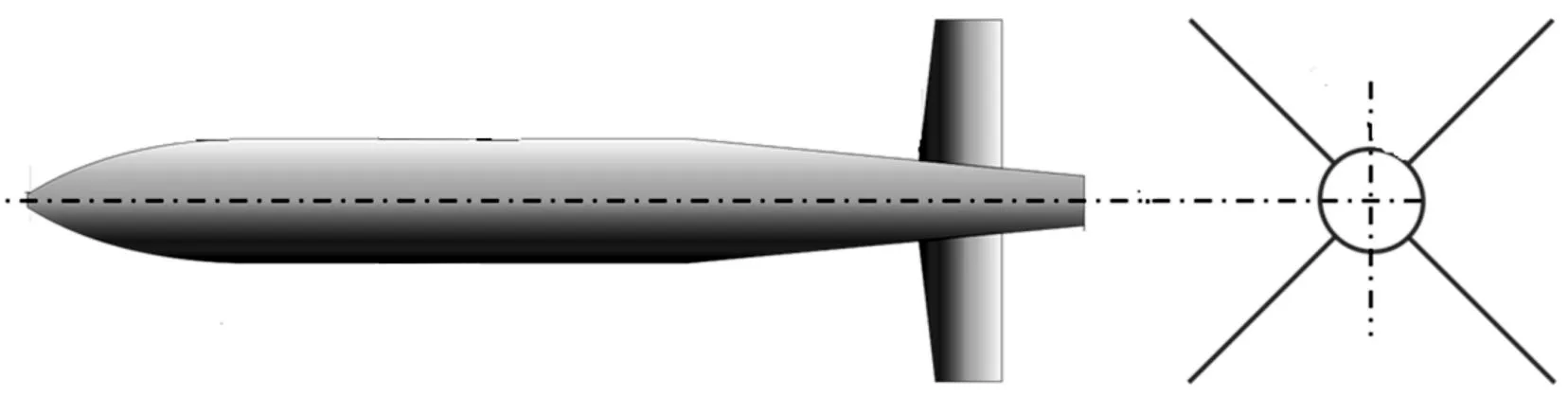
图1 无展开翼航行器外形示意图
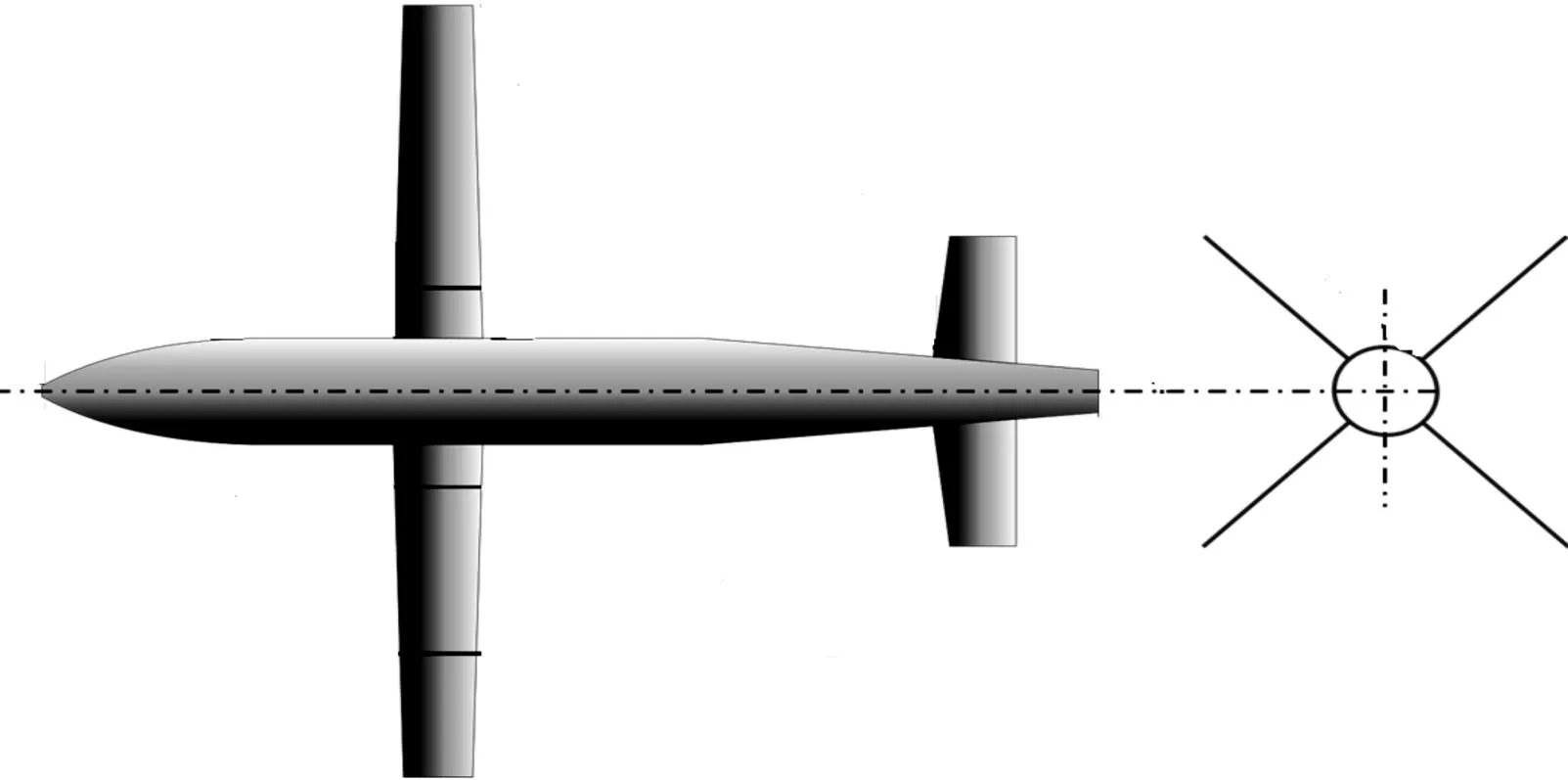
图2 有展开翼航行器外形示意图
1入水弹道数学模型的建立
1.1坐标系的选择
为了研究航行器的运动,应选用一些坐标系。一般来说,坐标系的选择是任意的,但是如果坐标系选择得当,会给讨论问题带来方便。本文选用的坐标系为地面坐标系ox0y0z0、弹体坐标系oxyz和速度坐标系ox1y1z1(如图3所示)。运动学参数选择位置坐标x0、y0、z0、速度vx、vy、zz、姿态角θ、φ、φ,角速度ωx、ωy、ωz、攻角与侧滑角α,β,各参数物理意义及量纲参考文献[6]。
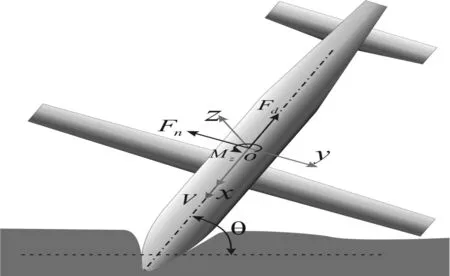
图3 体坐标系及主要计算量
1.2动力学方程组
入水弹道运动方程建立在雷体坐标系中,雷体坐标系的原点取在质心截面的航行器对称轴线上,即质心坐标为(o,yc,zc),其动力学方程组为
(1)
1.3运动学方程
式(1)~式(5)中共有14个方程,包含14个未知数:x0,y0,z0,vx,vy,vz,ωx,ωy,ωz,θ,φ,ψ,α,β封闭可解。
2流体动力
参考文献利用[6]中提出的公式可以确定航行器的沾湿表面。航行器带空泡航行阶段的流体动力分解为3部分:由于流体静压力作用产生的浮力FB及浮力矩MB;准定常假设下由于流体压力产生的流体动力Fp及力矩MP;由于运动的非定常性产生的流体惯性力Fλ及力矩Mλ[7]。
浮力只产生于沾湿表面,浮力的大小等于沾湿表面排开水的重力。若某个表面元素处于全沾湿状态,则该表面元素受到的浮力等于其表面包容体积水的重力;若某个表面元素处于部分沾湿状态,沾湿部分的扇面角为βi1与βi2(参见图4),则该表面元素排开水的质量mi为
图4 表面元素的沾湿扇面
(5)
该表面元素对浮力与浮力矩的贡献分别为:
流体动压力的大小定义为与物面上流体的法向速度平方成比例。第i个表面元素周向角位置为β处的法向速度vβi为
(8)
式中:v为航行器(质心)的速度(m/s);ω为航行器的转动角速度(rad/s);rβi为由雷体坐标系原点至第i个表面元素上角位置为β处的矢径(m)
(9)
nβi为第i个表面元素角位置为β处的单位外法线矢量(m)。
(10)
在微面积Ridβdxi/cosβi上流体动压力的大小dFpi为
(11)
第i个表面元素上受到的流体动压力为
(12)
式中:Cp为流体动压力系数;vβ0i为与vβi为同一量级的常速,取一阶近似
(13)
第i个表面元素流体动压力力矩为
(14)
航行器入水过程中的附加质量用分布在航行器沾湿表面上的流体质量表示,其分布规律用附加的流体高度h来描述,对于不同几何形状表面的h取值,其建议采用:
半径为R0的圆盘两侧表面
(15)
半径为的球体表面
(16)
半径为的长圆柱体表面
(17)
利用流体高度h,第i个表面元素上沾湿扇面内周向角为βi处的微面积上的附加质量dλi可表示为
(18)
与附加质量相关的动量定义为与物面上的法向速度成正比例,于是第i个表面元素的附加质量动量与动量矩为:
(19)
Kλi=ρhiRidxi(Ritanγi-xi)·
(20)
而利用动量与动量矩定理求出作用在第i个表面元素上的惯性力Fλi及力矩Mλi,即:
(21)
(22)
除了上述沾湿表面上的浮力、流体动压力及惯性力外,还需考虑航行器入水初期开口空泡阶段发生在航行器头部下侧的局部封闭空泡内的蒸汽压力,该压力大大低于大气压力,使航行器产生一个低头力矩,对斜入水航行器的初期弹道产生重要影响。局部封闭空泡内的蒸汽压力pd以经验公式计算,即
(23)
式中:pa为大气压力(Pa);S为航行器入水后的行程(m);D为航行器直径(m);cos(x,z0)为雷体坐标系x轴与地面坐标系z0轴夹角的余弦。
将pd在表面元素的空化扇面上积分,得元素上蒸汽压力的合力Fdi与合力矩Mdi,即:
(24)
Mdi=pdRidxi(Ritanγi-xi)·
(25)
对于展开翼,在计算中每一切片上的2片展开翼分别作为一块二元平板处理,根据展开翼在空泡壁内的相对关系,可以分别求得水平二元平板上沾湿区域两端点的y坐标:y1、y2(y2>y1)和z坐标:z1、z2(z2>z1)。展开翼上沾湿区域在y1~y2之间,其上任一单元在体坐标系中的坐标为(x,y,0)(x为该切片的x坐标),该单元的相对来流速度vf的各分量为vfx、vfy和vfz,相对于该单元的来流攻角
(26)
(27)

(28)
(29)
作用在航行器上总的流体动力Ff与力矩Mf为各表面元素上流体动力之和,即:
(30)
Mf(t)=∑[MBi(t)+Mpi(t)+Mλi(t)+
(31)
3入水弹道计算
入水弹道采用Matlab进行仿真[8]。因篇幅原因,本文给出了2组典型初始条件的入水弹道参数计算曲线。① 无展开翼和有展开翼,入水速度100 m/s,入水角为45°,如图5和图6所示。② 无展开翼和有展开翼,入水速度280 m/s,入水角为30°,如图7和图8所示。
4结论
1) 航行器带有展开翼条件下,与无展开翼相比,空泡段时间相差不大。
2) 航行器无论有无展开翼都是在空泡段内损失绝大部分轴向速度,带有展开翼的航行器入水后由于展开翼的较大升力矩存在,航行器急速抬头至接近竖直时空泡段结束。
3) 存在展开翼条件下,航行器俯仰角的变化更剧烈更迅速。
4) 从入水深度上看,相同初始条件下,相同入水时间内,带有展开翼的航行器最大入水深度相比无展开翼航行器减少,且入水后带有展开翼的航行器出现上浮现象,且上浮随入水初速增加而增加。观察入水速度为280 m/s,入水角为30°的计算结果,可以看到有无展开翼形成的入水弹道差异是非常明显的,无展开翼航行器入水深度20 m以下,有展开翼航行器最大入水深度10 m左右,且迅速上浮。

图5 无展开翼入水速度100 m/s 入水角45°入水弹道,空泡时间0.589 28 s
图6 有展开翼入水速度100 m/s入水角45°入水弹道,空泡时间0.590 44 s
图7 无展开翼入水速度280 m/s入水角30°入水弹道,空泡时间0.602 59 s
图8 有展开翼入水速度280 m/s入水角30°入水弹道,空泡时间0.669 63 s
参考文献:
[1]严忠汉.试论鱼雷入水问题[J].中国造船,2002(9):88-93.
[2]潘光,韦刚,杜晓旭.空投水雷入水及水下弹道的设计与仿真[J].火力与指挥控制,2007,32(3):85-87.
[3]李兵.基于镜像原理的空投滑翔器入水冲击力计算[J].计算机仿真,2011(8):15-19.
[4]阚雷,张宇文,范辉,等.浮力驱动式水下滑翔机运动仿真[J].计算机工程与工程,2007,43(18):99-201.
[5]吴利红,俞建成,封锡盛.水下滑翔机器人水动力研究与运动分析[J].船舶工程,2006,1(28):12-15.
[6]张宇文.鱼航行器道与弹道设计[M].西安:西北工业大学出版社,1999.
[7]黄景泉,张宇文.鱼雷流体力学[D].西安:西北工业大学,1989.
[8]黄永安,马路,刘慧敏.MATLAB7.0 建模仿真开发与高级工程应用[M].北京:清华大学出版社,2008.
(责任编辑周江川)

猜你喜欢
力学学报(2022年9期)2022-10-05
哈尔滨工程大学学报(2022年5期)2022-06-07
航空学报(2021年12期)2022-01-10
上海交通大学学报(2021年8期)2021-09-02
节能技术(2021年2期)2021-05-14
数字海洋与水下攻防(2021年2期)2021-05-08
哈尔滨工程大学学报(2021年1期)2021-02-25
水下无人系统学报(2019年1期)2019-03-15
弹道学报(2018年2期)2018-07-09
舰船科学技术(2017年11期)2017-11-27