基于1553B总线星时精确产生硬件秒脉冲的方法
2016-03-16 06:36李孝庆
导航定位与授时 2016年4期
李孝庆,王 艳,李 坤
(北京空间机电研究所,北京 100094)
基于1553B总线星时精确产生硬件秒脉冲的方法
李孝庆,王 艳,李 坤
(北京空间机电研究所,北京 100094)
本设计在整星不能提供硬件秒脉冲的情况下,利用单片机对1553B总线协议芯片进行配置,使其只对星时数据产生中断。该中断触发外围电路自主产生硬件秒脉冲信号,进而实现校时。由于该方法为纯硬件的触发控制环节,在不考虑卫星平台发送星时数据随机误差的情况下,其误差仅取决于硬件的延时误差,通过标定可达到与整星提供秒脉冲相同的校时精度,而大大优于不采用校时的情况。此外,该成果通过对触发电路外围进行配置,可以实现任意脉宽及方向的秒脉冲信号输出,可满足不同型号对不同类型秒脉冲信号的需求,具有很大的灵活性及广泛的适用性。
遥感相机;1553B总线;星时;硬件秒脉冲
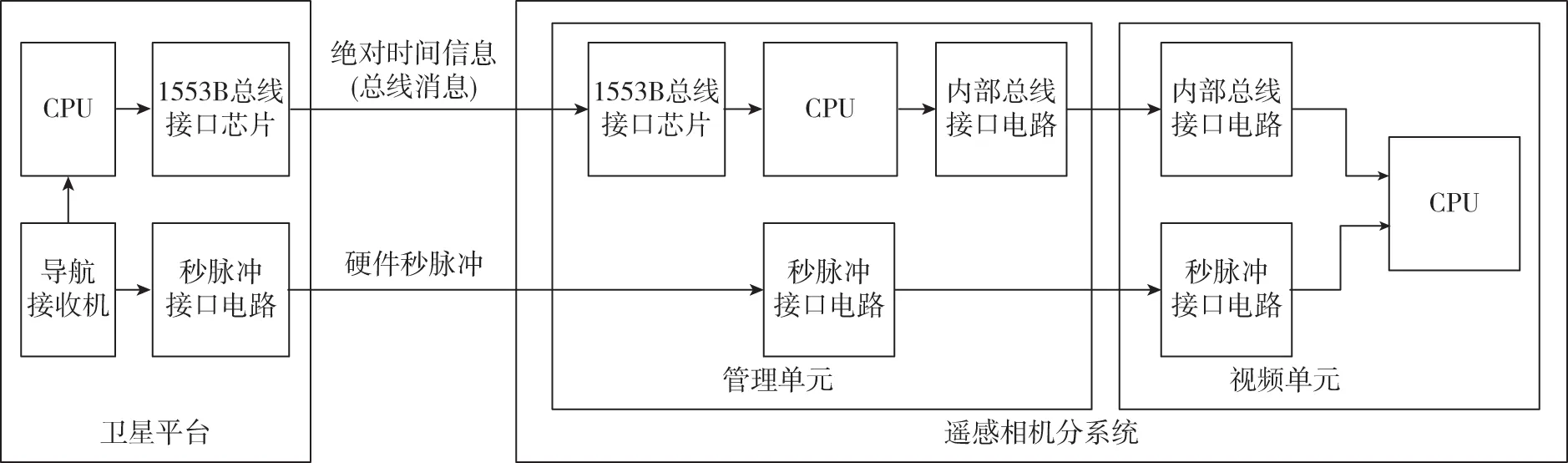
图1 传统校时过程数据流向示意图Fig.1 The data flow diagram of traditional synchronization process
0 引言
在以1553B总线作为星载总线的卫星平台上,遥感相机大多采用硬件秒脉冲校时的方法来实现高精度时间同步,即卫星平台的导航接收机锁定导航信号的同时,产生严格对应的秒脉冲信号和绝对时间信息。秒脉冲信号为遥感相机提供精确的校准时刻,绝对时间信息为遥感相机提供严格的维护信息[1]。遥感相机视频单元以秒脉冲信号作为触发启动内部计时器开始计时,当视频单元接收到在内部经过一系列处理而累加了较大延时的绝对时间时,以内部计时器的计时对绝对时间进行校时,从而得到高精度的与星时相符的本地时间[2]。传统校时方法数据流如图1所示。该方法的校时精度仅由遥感相机视频单元内部计时器的时间分辨率决定。
目前,遥感相机图像帧频最大为500Hz,为保证图像精度,方便图像处理,本地时间的校时精度必须小于2ms。而在图1中,绝对时间信息传输链路具有较大的随机延时,根据以往经验,该链路的总延时约为40~50ms,其中,卫星平台的延时较小,约为0~1.5ms,而遥感相机分系统内的延时约为38.5~48.5ms。
本设计在卫星平台不能提供硬件秒脉冲的情况下,采用软硬件配合的方法,通过修改1553B协议芯片配置方式并配合部分新增电路,在相机分系统内自主产生了与通过1553B总线传输的绝对时间严格对应的秒脉冲信号,然后利用该秒脉冲信号对累加了内部处理延时及传输延时的绝对时间进行校时,以较小的代价解决了校时精度问题。该方法可完全校正绝对时间信息在遥感相机分系统内处理及传输的延时,校正后本地时间的准确度仅由卫星平台延时决定,即小于1.5ms,可满足目前所有遥感相机对校时精度的要求。
1 传输及处理延时分析
绝对时间信息在遥感相机分系统内的数据传输状态及数据处理过程如图2所示。图2中共包含Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ五个数据传输过程和A、B、C、D、E五个数据处理过程。下面分别对各数据传输状态及数据处理过程的延时情况进行分析。

图2 绝对时间信息在遥感相机分系统内数据流向示意图Fig.2 The data flow diagram of absolute time in branch system of remote sensing camera
过程Ⅰ:该过程上传输的信息形式为串行曼彻斯特码。该信息的发送开始时刻由卫星平台控制,为每秒一次的固定周期信号。在绝对时间信息的数据长度确定时,其传输延时为系统延时,不存在随机延时。
过程A:该过程接收1553B总线上的串行曼彻斯特码,在芯片内部完成串并转换、数据存储,然后根据配置的不同,生成中断信号,或者将状态寄存器置位。此过程延时由芯片内部硬件电路决定,为系统延时[3],可以通过测试得到,不存在随机延时。
过程Ⅱ:该过程上传输的信息形式为未加处理的并行数据。该信息的发送开始时刻由管理单元的单片机决定。当该单片机把1553B接口芯片配置成中断模式且把该中断设为最高优先级中断时,只要1553B接口芯片生成中断,单片机立即读取该数据,此过程不存在等待过程,延时为系统延时,可通过计算得出,不存在随机误差;当单片机把1553B接口芯片配置成中断模式但未把该中断设为最高优先级中断时,如果1553B消息结束中断到来时,单片机程序运行在更高级别中断程序上,则读取过程存在等待时间且等待时间未知,除系统延时外,还存在随机延时;当单片机把1553B接口芯片配置成查询模式时,单片机读取数据的时刻未知,除系统延时外,必然存在随机延时。上述状态总结为:受管理单元软件设置及软件当前运行状态影响,该过程传输延时除系统延时外,可能存在随机延时。
过程B:单片机把读取的并行数据组包,为上述信息添加包头、校验字等信息,然后把组包后的数据按内部总线通信时序的要求以并行数据的形式发送出去。如果上述过程是在最高优先级的中断中完成,则程序运行过程不会被打断,延时为系统延时,不存在随机延时;如果在较低优先级的中断或主程序中完成,该延时将受到程序当前运行状态影响,除系统延时外,还存在随机延时。
过程Ⅲ:该过程上传输的信息形式为组包后的并行数据。该信息的发送开始时刻由过程B的单片机决定。其传输延时固定,不存在随机延时。
过程C:该过程把组包后的并行数据锁存后进行并串转换,并把串行化的数据以差分的形式按内部通信波特率的要求发送。该过程由硬件电路完成,延时为系统延时,不存在随机延时。
过程Ⅳ:该过程上传输的信息形式为差分信号,该信息的发送开始时刻由过程B的单片机控制,延时为系统延时,不存在随机延时。
过程D:该过程把接收到的差分信号转换成单端信号并完成串并转换、数据存储,以中断的形式通知视频单元CPU读取。此过程延时由硬件完成,为系统延时,不存在随机延时。
过程Ⅴ:该过程上传输的信息形式为组包后的并行数据。该信息的发送开始时刻由视频单元CPU决定。与过程Ⅱ同理,该过程的延时由视频单元软件的中断优先级设置及软件当前运行状态决定,除系统延时外,可能存在随机延时。
过程E:该过程把接收到的并行数据进行符合性校验、解包,把数据恢复成绝对时间信息。此过程由视频单元软件的中断优先级设置及软件当前运行状态决定,除系统延时外,可能存在随机延时。
各传输过程及处理过程的延时情况如表1所示。

表1 遥感相机分系统内各传输过程及处理过程延时情况表
2 设计及验证
2.1 设计方案
通过上述分析可知,在不同的软件设置及软件运行状态下,过程Ⅱ、过程B、过程Ⅴ和过程E可能存在随机延时。为消除此随机延时,必须更改遥感相机分系统软硬件设计。
视频单元的运算量巨大、对实时性要求较高,如果通过软件校准的方法,视频单元软件修改难度较大,而且标定过程较繁琐。本设计在管理单元内,通过修改部分软件,新增部分硬件,自主产生了与总线绝对时间严格对应的秒脉冲信号,使后续校时问题回归传统方法。与传统校时方法相比,该方法只需要修改管理单元部分软硬件,不需要修改视频单元,代价较小。
设计方案及原理如图3所示,图3相比图2,增加了1、2、3、4四个数据传输过程和a、b、c三个数据处理过程,其中,秒脉冲自主产生电路为新设计电路。

图3 设计方案及原理示意图Fig.3 The diagram of design and principle
方案机理如下:
1)在管理单元软件初始化时,把1553B接口芯片配置成只有接收到1553B绝对时间消息时产生消息结束中断,其余所有类型消息都不产生中断的模式[4],1553B接口的其他消息由管理单元采用查询的方式访问。
2)当1553B接口芯片接收到一个1553B总线星时数据时,即由该芯片产生一个消息结束中断。该中断信号为脉宽为500ns的负秒冲。
3)该中断作为秒脉冲自主产生电路的触发信号,通过调整电路参数,产生符合脉冲宽度及方向要求的秒脉冲信号。
4)该信号经秒脉冲接口电路发送给视频单元,作为校时脉冲对绝对时间进行校时。
通过第1节分析可知,1553B接口芯片接收总线数据、完成转换、存储并生成中断信号的处理延时为系统延时。秒脉冲传输的过程,即图3中1-a-2-b-3-c-4-E的过程全部由硬件电路完成,其中不存在软件的干预,所以链路上的传输延时为系统延时,不存在随机延时。通过标定,可以在视频单元CPU上得到与管理单元1553B接口芯片上完全同步的秒脉冲信号。
校时过程为:利用秒脉冲信号的上升沿或下降沿启动状态E的内部计时器,当状态E收到内部总线接口发送的绝对时间信息时,在收到的时间数据上叠加内部计时器的当前记时,作为相机当前的本地时间。由于状态E接收的秒脉冲信号和绝对时间信息是相对同步的,所以不论绝对时间信息的延时多大,校正后的本地时间与绝对时间都是同步的。两者的误差只由状态E内部计时器的时间分辨率决定。
2.2 秒脉冲自主产生电路设计
秒脉冲自主产生电路以单稳态触发器为核心,以1553B接口芯片的中断信号作为输入脉冲,通过调节电路参数,可在互为反相的两个输出管脚上获得任意宽度及方向的脉冲信号,其电路原理如图4所示。
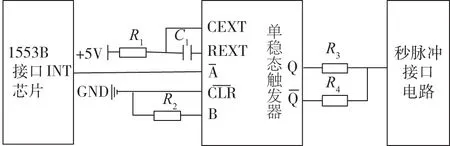
图4 单稳态触发电路原理图Fig.4 The diagram of the principle of monostable trigger circuit
图4中,CLR信号设置为“0”,输入信号A接在1553B接口芯片的中断管脚上,输入信号B设置为“0”。通过调节配置管脚REXT和CEXT脚上的阻容值,可在输出管脚上获得任意宽度的脉冲信号。当R1>10kΩ并且C1>10nF时,脉冲宽度TW与电阻R1和电容C1的关系为[5]
TW≈0.45×R1×C1
(1)
通过选择焊接电阻R3或者是R4,可以获得任意方向的脉冲信号。由于1553B接口芯片输出的中断信号为脉宽为500ns的负秒冲,如果期望脉冲为正脉冲,则选择焊接电阻R4且不焊接电阻R3;如果期望脉冲为负脉冲,则选择焊接电阻R3且不焊接电阻R4。
2.3 设计验证
如果利用秒脉冲的上升沿启动计数器,通过焊接电阻R4且不焊接电阻R3,取R1阻值为10kΩ,C1容值为10nF时,得到的系统延时测量典型波形如图5所示。

图5 系统延时测量典型波形图Fig.5 The typical waveform of the measurement of system delay
图5中,C1通道为管理单元1553B总线上接收到的总线绝对时间,C2通道为视频单元接收到的秒脉冲信号,C3通道为管理单元1553B接口芯片输出的中断信号。从大量测试数据得出,本设计得到的秒脉冲信号系统延时为6.89μs,需要在标定中扣除。
当卫星平台提供的绝对时间信息误差在0~1.5ms范围内时,本设计得到的秒脉冲测量典型波形如图6所示。通过大量测试数据分析,该设计秒脉冲信号相对绝对时间的误差范围为0~1.5ms,与卫星平台的绝对时间信息误差一致,即本设计本身不引入随机误差。

图6 秒脉冲测量典型波形图Fig.6 The typical waveform of the measurement of pulse per second
3 结论
本设计采用总线触发同步响应的方式,解决了相机分系统在整星不能提供秒脉冲信号的情况下系统校时精度低的问题,提升了相机分系统对卫星平台的适应性。
本设计可以作为整星秒脉冲的冗余设计,以提高遥感相机分系统的可靠性。
本设计思路还可以应用于其他从总线数据解析、对精度要求较高、对电平或脉冲敏感的控制信号的产生过程,具有广泛的适用性。
[1] 田贺祥,王同桓,李璇,等.遥感卫星星上时间管理方法[J].传感器与微系统,2013,32(4):80-82.
[2] 江澄,何红艳.色散推扫型高光谱数据系统残余误差校正[J].航天返回与遥感, 2014,35(6):91-98.
[3] Data device corporation, Mil-sed-1553A/B notice 2 RT and BC/RT/MT, Advanced communication engine[EB/OL]. http://www.ddc-web.com.
[4] GJB 289A-1997数字式时分制指令/响应型多路传输数据总线[S].
[5] Stmicroelectronics group of companies, Rad-hard dual retriggerable monostable multivibrato[EB/OL].http://www.st.com.
The Method to Precisely Produce Hardware Pulse Per Second Based on the Satellite Time of 1553B Data Bus
LI Xiao-qing, WANG Yan, LI Kun
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
The major point of this method is to apply the process of satellite time, and use hardware pulse per second produced by 1553B peripheral circuit which is controlled by single chip micyoco to achieve synchronization in case the satellite platform cannot provide hardware pulse per second. Since this method only involves hardware trigger and control, errors are all about delays caused by hardware, without considering accidental errors of satellite time transmitted by satellite platform. Through calibration, this method achieves synchronization as precise as that of the pulse per second provided by satellite platform, which is much better than the method that cannot realize synchronization. In addition, this method achieved outputting pulse per second in any width and any direction by arranging peripheral trigger circuit, and can also meet the needs of different models for different types of pulse per second, which is flexible and has wide application.
Remote sensing camera; 1553B data bus; Satellite time; Hardware pulse per second
10.19306/j.cnki.2095-8110.2016.04.012
2016-02-02;
2016-03-18。
李孝庆(1984-),男,硕士,工程师,主要从事遥感器电子学设计工作。E-mail:lixiaoqing1984@yeah.net
V443
A
2095-8110(2016)04-0065-05
猜你喜欢
数码世界(2019年12期)2019-12-01
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年14期)2019-08-20
智能计算机与应用(2018年6期)2018-10-31
电子制作(2018年11期)2018-08-04
电子制作(2018年8期)2018-06-26
电子制作(2018年2期)2018-04-18
时代英语·高二(2017年4期)2017-08-11
电子制作(2017年19期)2017-02-02
对联(2015年22期)2015-06-11