
一种末端能量管理段结合PD控制的标称轨迹制导律*
2016-04-10 08:00陈阳
空间控制技术与应用 2016年3期
陈阳
(北京控制工程研究所,北京100080)
一种末端能量管理段结合PD控制的标称轨迹制导律*
陈阳
(北京控制工程研究所,北京100080)
为了提高制导律的精度和适应性,针对大升阻比再入飞行器的末端能量管理段(TAEM段)的飞行特性,提出一种飞行轨迹制导律.该方法的制导律由标称制导指令和PD控制指令两部分组成,标称制导指令由离线生成的标称轨迹的几何特性结合飞行器的飞行状态实时生成,PD控制指令则由飞行器当前飞行状态与期望飞行状态的误差计算生成.该方法经数学仿真表明,具有较好的控制效果.
PD控制;标称轨迹;TEAM段;制导律设计
0 引言
大升阻比再入飞行器属于高超声速飞行器的一种,具有高机动性、大航程的特点[1].其末端能量管理段是马赫数约为2.5起,从高度约30 km降到约3 km为止,因其制导方法是通过规划能量-射程的剖面并对能量加以控制,故名为末端能量管理段.该段的控制难点在于在满足末期能量约束需求的同时,对终端状态也有技术要求,需要同时满足着陆要求.
在末端能量管理段中,目前应用比较广泛的仍然是标称轨迹法,其主要原理为在飞行器的计算机中,预先录入标准再入轨道参数的方法,根据飞行器实际轨迹与标称轨迹的误差计算出控制指令.
为了提高制导律的自主性、自适应性和鲁棒性,众多学者在这方面进行了大量的研究.早在20世纪60年代初就有大量的参考文献[2-5]报道关于标称轨迹的优化方法,后续又有如参考文献[6]提出的可重复使用跨大气层飞行器再入混合制导方法,将再入轨道在线生成技术、基于阻力加速度飞行剖面的跟踪制导技术和数值技术相互融合,参考文献[7]通过对剩余航程的估算,对参考阻力加速度剖面进行周期性更新,并采用数值预测方法搜索倾斜角反转时刻,参考文献[8]以阻力与能量关系的优化剖面作为标称轨迹,推导用于跟踪标称轨迹的PID制导律,参考文献[9]和[10]针对一种大升阻比飞行器,设计了一种跟踪参考阻力加速度的制导方法,参考文献[11]提出了一种改进的再入制导算法,该算法根据剩余航程和预测航程信息,对参考飞行剖面参数进行修正,以消除剩余航程误差.
本文提出了一种针对末端能量管理段的制导律,该方法在传统标称轨迹法的纵向制导中创新性地引入了实时PD控制,具有良好的控制精度.
1 运动学模型
1.1 弹道坐标系上的质心运动模型
由动量定理可知

将式(1)投影到弹道坐标系中,由于弹道坐标系为动系,因此需引入局部导数的概念,即

其中Ω为弹道坐标系相对于地面坐标系的转动角速度,将式(2)投影到弹道坐标系可到
仿真时飞行器转弯采用倾斜转弯(back-to-turn,BBT)方式,故取侧滑角为0.最终整理得到的飞行器质心的运动学模型在弹道坐标系的表达形式为
1.2 地面坐标系上的质心运动模型
在地面坐标系中,飞行器速度分量为

根据弹道坐标系与地面系之间的转换矩阵,最终整理得到

式中,h为高度,z为侧向航程.
2 结合反馈PD的标称轨迹制导律设计
TAEM段的制导分为纵向制导和横向制导,纵向制导是基于能量-航程剖面形成攻角控制指令和阻力板控制指令,进行高度和速度控制;横向制导则是对于地面轨迹的设计,通过预测航程从而生成倾侧角指令,来跟踪横向轨迹.
由于传统的标称轨迹制导方法是根据离线计算出来的轨迹进行规划,当实际飞行状态与规划的轨迹偏离程度较大时,这种方法的控制效果会变弱,所以本文采用的标称轨迹控制方法结合了对跟踪误差的反馈控制,给出了另一种攻角、阻力板的控制方法,从而提高了控制精度.
2.1 标称制导指令
(1)标称攻角控制指令
根据已经设计的高度-航程剖面可以拟合出飞行器飞行高度h与已飞航程S的关系曲线[12]

根据飞行器航迹倾角的定义可知,航迹倾角为飞行高度h对已飞航程S的微分,即

令γ*表示标称航迹倾角,则对标称航迹倾角的正切求导得到

由飞行器动力学模型已知

所以可以得到

同时,

整理得到
最终可以解算出标称的升力系数L*,即

因为L*=C*LQrefSref,所以可以得到标称升力系数C*L,因为升力系数对攻角的拟合曲线为单调函数,所以最终得到标称攻角α*.
(2)标称阻力板控制指令
根据已设计的标称轨迹可以得到当前高度所对应的标称速度V*,即

所以速度误差ΔV=V-V*.
在该阶段采用阻力板来增大速度变化率,使得飞行器的速度满足要求.速度控制根据实时速度误差的范围采用分段阻力板角度控制,指令如下:

至此,得到基于标称轨迹的标称指令α*和 δ*Dsb.
2.2 反馈PD控制指令
2.2.1 纵向反馈控制量
纵向的偏差反馈指令设计为

式中,Δh=h-href,h为当前飞行高度,href为参考飞行高度.
为了使制导系统具备良好的性能指标,令误差是一个二阶震荡系统,即

其中取ξ=0.707,ω=0.05rad/s.
已知飞行器动力学模型

得到

对式(21)求变分得到

在对纵向变量进行控制时,根据反馈线性化原理,认为在这一点横向运动与纵向运动是解耦的,因此Δ项可以省略,所以式(22)简化为已知·h =Vsinγ,对其进行求变分得到


整理得到,
令与式(19)相等,得到参数为

2.2.2 横向反馈控制量
横向控制指令根据地面轨迹的性质不同分为3段,每段的倾侧角指令形式如下,具体操作方法见参考文献[12].
捕获段的目的是使飞行器的航向指向航向校正圆柱的切线方向,因此倾侧角指令为

航向校正段的飞行器的倾侧角指令为

预备着陆段,调整飞行器的航迹使其对准跑道,设计指令为

2.3 总控制量
综上所述,最终进入系统的控制指令如下表示:

3 仿真结果
举例说明上述方法的正确性.针对初始高度为30 km,初始速度为690.930 1 m/s的某一飞行器模型进行数学仿真,最终结果飞行器从30 km降落到3 km总共耗时1 293.418 s,高度误差从初始的372.134 1 m最终控制为0,地面航程为94.386 km,单位质量能量从532.69 kJ/kg降到43.767 4 kJ/kg,飞行器速度从690.930 1 m/s降到169.513 5 m/s,速度误差最终控制为0,法向过载范围为[-0.4,0.8],横向误差由74.619 1 km控制到0 km对准跑道,所有物理量均满足约束条件,仿真结果如图1~7所示.本文方法较好实现了高度、速度和横向误差的控制.

图1 PD控制的航程与高度的曲线Fig.1 The diagram of distance and height with PD control
图2 PD控制的航程与高度误差的曲线Fig.2 The diagram of distance and height error with PD control
图3 PD控制的航程与单位质量能量的曲线Fig.3 The diagram of distance and the energy per weight with PD control

图4 PD控制的时间与速度的曲线Fig.4 The diagram of real time and velocity with PD control
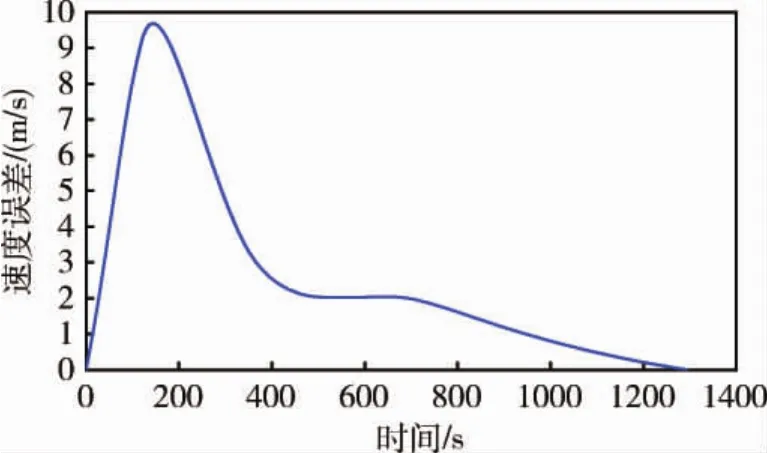
图5 PD控制的时间与速度误差的曲线Fig.5 The diagram of real time and velocity error with PD control

图6 PD控制的时间与法向过载的曲线Fig.6 The diagram of real time and the normal acceleration with PD control

图7 PD控制的地面轨迹曲线Fig.7 The diagram of underground trajectory with PD control
4 结论
本文研究了一种结合PD控制与标称轨迹规划的方法,相对于传统的依赖于离线生成数据的标称轨迹法,实时引入了当前飞行轨迹与期望飞行轨迹的偏差所生成的在线PD控制,给出了制导律的设计原理,分别从纵向和横向两方面进行控制,根据建立的运动学模型,通过数学仿真验证了方法的可行性,最后的仿真数据结果满足约束条件,说明该制导律具有良好的控制效果.
[1]李惠峰.高超声速飞行器制导与控制技术(上)[M].北京:中国宇航出版社,2012.
[2]BRYSON A E,DENHAM W F,CARROLL F J,er al.Determination of the lift or drag program that minimizes re-entry heating with acceleration or range constraints using a steepest descent computation procedure[J].Aerospace Science,1962(29):420-430.
[3]BRYSON A E,MIKAMI K,BATTLE C T.Optimum lateral turns for a re-entry glider[J].Aerospace Engineer,1962(21):18-23.
[4]LEVINSKY E S.Application of inequality constrains to variational problems of lifting re-entry[J].Aerospace Science,1962(29):400-409.
[5]LEONDES C T,OSGOOD W R.Optimization of threedimensional re-entry trajectories[J].Transactions on Aerospace and Electronic System,1969,5(2):345-346.
[6]胡建学,陈克俊,赵汉元,等.RLV再入混合制导方法研究[J].宇航学报,2007,28(1):213-217.HU J X,CHEN K J,ZHAO H Y,et al.Hybrid entry guidance for reusable launch vehicles[J].Journal of Astronautics,2007,28(1):213-217.
[7]潘乐飞,李国新.衍化的加速度再入制导律方案研究[J].计算机仿真,2007,24(2):22-25.PAN L F,LI G X.Study of evolved acceleration reentry guidance[J].Computer Simulation,2007,24(2):22-25.
[8]陈敬志,杨一栋.一种新的空间飞行器再入制导律研究[J].飞行力学,2007,25(3):58-61.CHEN Z J,YANG Y D.Research of the guidance law based on a new method in spacecraft entry[J].Flight Dynamics,2007,25(3):58-61.
[9]杨俊春,胡军,倪茂林.基于特征模型的再入飞行器自适应制导律设计[J].中国科学:信息科学,2008,38(12):2134-2149.YANG J C,HU J,NI M L.Adaptive control method based on characteristic model[J].China Science:Information Science,2008,38(12):2134-2149.
[10]张钊,胡军,王勇.基于特征模型的再入飞行器制导律设计[J].空间控制技术与应用,2010,36(4):12-17.ZHANG Z,HU J,WANG Y.Characteristic modelbased reentry vehicle guidance law design[J].Aerospace Control and Application,2010,36(4):12-17.
[11]胡建学,陈克俊,赵汉元,等.改进的 RLV再入制导方法及其性能分析[J].宇航学报,2006,27(6): 1409-1413.HU J X,CHEN K J,ZHAO H Y,et al.An evolved entry guidance and performance analysisforreusable launch vehicles[J].Journal of Astronautics,2006,27 (6):1409-1413.
[12]精确制导与控制研究所.大升阻比再入飞行器TEAM段控制技术报告[D].西安:西北工业大学,2014.Faculty of Aerospace Engineering.The control technology of the re-entry vehicle with large lift drag ratio in team phase[D].Xian:Delft University of Technology,2014.
A Nominal Trajectory Method Combined with PD Control in TAEM Phase
CHEN Yang
(Beijing Institute of Control Engineering,Beijing 100080,China)
In order to enhance the precision and the flexibility of the guidance law,considering the flight characters of the re-entry vehicle with large lift drag ratio during the terminal area energy management (TAEM)phase,a guidance law of planning the trajectory is given.This method is composed of two parts,the nominal control orders and the PD control orders.The nominal control orders are built realtime based on the geometrical characters of the nominal trajectory that are gained off-line and by the current status of the vehicle at the same time,while the PD control orders are calculated according to the error signals between the current status and the excepted status.After simulating and verifying,the effect and the advantage of this method can be shown.
PD control;nominal trajectory;TAEM phase;guidance design
V448.2
A
1674-1579(2016)03-0058-05
10.3969/j.issn.1674-1579.2016.03.011
陈 阳(1990—),女,硕士研究生,研究方向为航天器导航、制导与控制.
*国家自然科学基金资助项目(61333008,61273153).
2016-01-22
猜你喜欢
小哥白尼(军事科学)(2022年7期)2022-09-20
装备维修技术(2021年37期)2021-11-03
现代电子技术(2019年15期)2019-08-12
海峡姐妹(2019年5期)2019-06-18
百科探秘·航空航天(2017年12期)2018-01-31
中国纤检(2016年10期)2016-12-13
科技视界(2016年13期)2016-06-13
航海(2016年2期)2016-05-19
卫星电视与宽带多媒体(2009年17期)2009-10-13
农家顾问(2009年7期)2009-08-14
