
利用Hausdorff距离地磁匹配算法的室内定位方法
2016-04-28 23:49姜浩黄鹤赵焰杨军星
科技传播 2016年7期
姜浩+黄鹤+赵焰+杨军星
摘 要 目前在众多室内环境中,存在大量钢筋混凝土结构的建筑物,会产生明显地磁异常场扰动。为了探究如何利用局部地磁异常场来实现室内定位过程,先简要介绍地磁场特征和地磁匹配原理,提出将Hausdorff距离算法运用到地磁匹配定位中。在实验区域中用载体采集磁场特征数据建立定位基准图,计算实时获得地磁值与数据库里地磁特征量的相似度,估计出地磁传感器的位置。实验结果表明,提高基准图的精度,降低量测噪声和控制载体采集速度,有利于该匹配算法实现较好定位效果。
关键词 地磁异常场;位置估计;室内定位;Hausdorff距离
中图分类号 TU19 文献标识码 A 文章编号 1674-6708(2016)160-0157-02
地磁场可以看作一个矢量场,在这个巨大的矢量场内,根据地磁学理论,靠近人类活动范围的每个位置上都具有唯一的磁场矢量值,如果可以测出该位置的多个地磁场的典型特征信息,即可实现全球任意地点定位。在生物界中,人类已经发现许多动物借助地磁场来实现方向定位和导航[1]。例如,大螯虾不仅可以判断出地磁场的方向,甚至能估计出自己相对于目的地的距离。目前在室外民用领域中,借助GPS可以实现精确定位和导航,然而GPS信号被建筑物遮挡,无法在室内进行定位。为了解决这个问题,提出了基于无线网络和蓝牙信标定位等方法。虽然提高定位精度,却要建立昂贵的基础设施,并容易受到移动物体、多路径效应的影响。实验证明[2]在钢筋混凝土结构的建筑物中,存在局部地磁异常场,这些异常场随着位置而有所不同,并且在时间上很稳定。本文选用这些地磁异常特征量绘制成基准图,通过载体上的地磁传感器测量地磁特征,根据Hausdorff距离地磁匹配算法与基准图进行相关匹配,实现对载体位置估计,并且通过仿真实验验证算法的可行性。
1 室内定位方法1.1 地磁匹配原理
在地磁扰动场中任何位置上地磁数据都具有典型特征,地磁匹配就是基于每个坐标位置上的地磁场强度值来实现定位的。室内地磁定位系统操作主要分为2部分,具体如图1所示。
1)预先建立地磁基准图,使匹配区域中的位置坐标与地磁场强度值相对应,这一步要求地磁基准图的精度适当,以便于下一步的定位。可以通过每隔0.5m采集一次地磁数据(连续采集10次数据求平均值,),通过插值构建地磁基准图。
2)估计载体位置,利用地磁传感器在载体运动过程中采集的地磁数据,通过合适的地磁匹配算法,将具有实时性的地磁特征量与基准图库中数据相比较,来估计当下载体在匹配区域中的位置。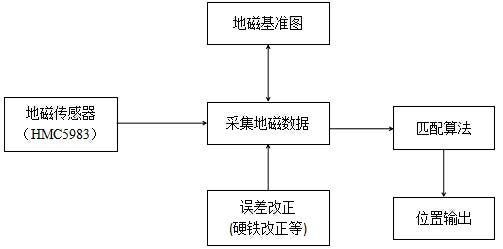
1.2 地磁匹配算法
与地形匹配中点匹配算法类似,不过地磁匹配算法涉及的匹配特征量有多个。随着技术的进步,小型磁传感器不仅可以获得地磁场总强度,而且可以获得在正北、正东以及竖直方向的各个分矢量,甚至磁偏角和磁倾角等。由于本文所用地磁传感器不能精确测量地磁场三分量的方向角,加之载体在运动过程中的航向角经常变化。地磁基准图的构建采用地磁异常场总强度,在实验区域中分布特征明显,随时间变化非常稳定。
目前,地磁匹配算法的研究不是很成熟,多处于仿真研究阶段,主要有相关度度量算法和滤波算法[3]。由于地磁传感器在测量中存在噪声,载体的磁性物质干扰,计算过程复杂等其他误差和失真因素的影响,致使定位精度不高,匹配成功率下降。为了提高载体采集特征量序列与基准图采样点上特征量序列的相关性,本文采用Hausdorff距离地磁匹配算法,它会降低一组地磁序列中数据受到噪声等因素干扰引起的地磁数据不稳定的影响,在数据库中寻找出最合适的匹配序列。
1.3 Hausdorff距离算法
Hausdorff距离又被称作极大极小距离,它描述了两组点集之间的相似程度,已普遍应用到二值图形学中,地磁匹配借助此算法获得新测度方式[4]。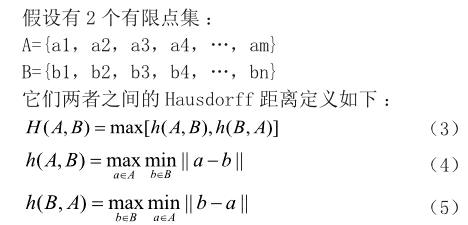
式中,H(A,B)表示两个方向上Hausdorff距离,h(A,B)表示A集合元素到B集合元素的单一方向上Hausdorff距离,令前者A与B互换可推出h(B,A)的定义。考虑仅比较磁场总强度,同时它也是一个标量,将|||| ||a ba b?=?看作是A,B间距离范数。从公式中,可以看出Hausdorff距离反映了两个点集的不匹配程度,它的距离越大,则两个集合相似性越低。
Hausdorff距离地磁匹配算法与传统算法有一定区别,它不强调点集中具体的匹配点对,使得点与点的关系变得模糊起来,因此在室内地磁定位中可以增强抗干扰性和容错性。
选用磁场总强度作为地磁特征量,建立地磁基准图,基于Hausdorff距离算法完成地磁匹配定位。实验过程中,由地磁传感器测量模块产生地磁特征量序列,遍历地磁基准图,将基准地磁数据序列当作(3)中集合A,将特征量序列当作集合B,运用Hausdorff距离算法,计算出H(A,B)中的最小值,它所对应的位置坐标即为匹配定位结果。
2 定位仿真环境
2.1 地磁基准图布置
为了实现前述定位过程,选择在本校科技研讨楼3层南北走廊进行实验,所取地磁区域长43.2m,宽1.8m,共有219(73×3)个采样点,采样点间隔为0.6m。将实测采样点上的地磁场强度作为Z值,走廊朝北方向作为X轴正方向,西方向作为Y轴方向,通过surfer软件建立地磁场总强度分布图。为了提高基准图分辨率,采用线性插值拟合出地磁场等值面图,将分辨率由0.6m提高到0.1m,如图2所示。
2.2 实验结果与分析
为了简化实验过程,选用一个智能小车作为载体,将地磁传感器(HMC5983)放置在小车竖直上方1.2m处(正常人手持手机高度),中间用木条连接,尽量降低磁性物质对测量精度的影响。设小车在地磁区域中作匀速运动,初始位置随机产生,采样周期0.2s,测量噪声为高斯白噪声,实验精度用定位坐标与实时坐标的点位误差来表示。
依据实验过程,分析比较量测噪声、小车行驶速度等因素对室内定位结果的影响。
1)设小车速度V=0.6m/s,量测噪声分别取50nT和100nT,在相同的匹配区域中随机放置小车。通过多次实验分析后,得出在其他影响因素不变的情况下,量测噪声越大,定位精度越低,甚至会增加错误匹配结果的次数,如表1所示。因此,地磁采集装置避免使用磁性物质制成,保持与磁传感器一定的距离,另外考虑精度更高、抗干扰能力更强的地磁测量模块。
2)设量测噪声为50nT,小车速度分别选取0.6m/s、1.2m/s、1.8m/s 3种情况下,与(1)种相同的匹配区域中随机放置小车。通过多次实验后,得出在其他影响因素不变的情况下,小车的速度快慢对于匹配结果的影响基本忽略不计,但是小车的速度过快,导致磁传感器采集的地磁数据量不够,会对匹配结果产生影响,如表2所示。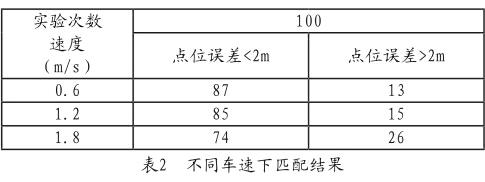
3 结论
本文提出基于Hausdorff距离地磁匹配算法的室内定位方法,并进行多次仿真实验,证明了该算法在室内定位中的可行性。由于本文选取的实验场所地磁匹配信息变化不明显,考虑下一步提高地磁基准图的精度。针对单一方式实现室内定位过程的匹配准确率不高的情况,探究利用当下无基础设施的WiFi环境来进一步提高室内定位的精度,使建立一种准确快速的室内定位方法成为可能。
参考文献
[1]Larry C.Boles and Kenneth J. Lohmann. True navigation and magnetic maps in spiny lobsters. Nature,421:60-63,2003
[2]G.Casinovi A.Geri, and G.M.Veca. Magnetic filed near a concrete wall during a lighning stroke. IEEE Transactions on Magnetic.vol.25 pp.4006-4008,1989
[3]邓翠婷,黄朝艳,赵华,等.地磁匹配导航算法综述[J].科学技术与工程,2012,24(12):6125-6131.
[4]徐遵义,晏磊,宁书年,等.基于Hausdorff距离的海底地形匹配算法仿真研究[J].计算机工程,2007,33(9):7-9.
猜你喜欢
华人时刊(2022年9期)2022-09-06
华人时刊(2020年15期)2020-12-14
小学生导刊(2018年34期)2018-12-18
公民与法治(2016年19期)2016-05-17
山东青年(2016年3期)2016-02-28
广州大学学报(自然科学版)(2015年4期)2015-12-23
读者·校园版(2015年7期)2015-05-14
母子健康(2015年1期)2015-02-28
延河(下半月)(2014年3期)2014-02-28
河南科技(2014年15期)2014-02-27
