
电动汽车转矩分配与横摆力矩控制研究
2016-05-18 08:18曹兢哲李中豪
汽车实用技术 2016年7期
曹兢哲,李中豪
(长安大学汽车学院,陕西 西安 710064)
新能源汽车
电动汽车转矩分配与横摆力矩控制研究
曹兢哲,李中豪
(长安大学汽车学院,陕西 西安 710064)
由于在结构布置、动力性等方面的突出优势,采用轮毂电机驱动已经成为未来汽车的重要发展方向。在文章中,对采用轮毂电机驱动的汽车进行了深入分析,建立整车动力学模型,进行了轮胎驱动力分配、横摆力矩控制的仿真研究。结果表明,轮毂电机可以大幅度提高车辆的动力性及操纵稳定性。
电动汽车;轮毂电机;转矩分配;横摆力矩控制
CLC NO.:U463.3 Document Code: A Article ID: 1671-7988 (2016)07-11-03
引言
由轮毂电机驱动的电动汽车是一种新型的电动汽车驱动方式。由于这种驱动结构相对简单,且使得各车轮驱动力可灵活分配,大幅度提高车辆动力学,所以其已经成为未来电动汽车的发展方向。在电动汽车中,电机控制是整车控制的重点部分,而电机转矩分配控制又是电机控制的这一重点之中的难点。
1、转矩分配控制
电动汽车既可以前轮驱动,亦可以后轮驱动或者四轮驱动,驱动力控制可由电机独立控制,具有快速的转矩响应,从而使电动汽车的驱动控制更加灵活,而且可以提高汽车的操纵稳定性。所以研究电动汽车的转矩分配控制就变得迫在眉睫。
如果可以合理控制每一个电机的驱动力矩或者制动力矩,就可以实现传统内燃机汽车上所有的底盘控制系统,比如ABS、TCS、ESP等系统的功能,而且能够实现制动能量回收,充分利用制动能量,减少消耗。电动轮汽车技术研究的难点在于电子差速和转矩分配,而且电动轮汽车的整车控制设计的核心主要就是这两点,尤其是转矩分配。所以对转矩分配的控制策略研究是本文的重点。
首先,车辆行驶过程中,由于各轮胎与地面间的接触情况不尽相同,且车轮间存在复杂的载荷转移现象,使得各轮胎的附着能力差别很大。而轮毂电机电动汽车可对各车轮的驱动力矩独立控制,由此便实现了根据各轮胎的附着能力进行驱动转矩分配的控制。其中,较常用的一种方法为基于附着裕度进行各车轮间的驱动转矩分配。电动轮汽车的结构简单,可以利用其结构优势,直接通过控制驱动电机让其产生反向的制动转矩,或者减小特定的电动轮驱动转矩,从而产生横摆力矩达到传统ESP的功能。
2、整车动力学模型搭建

图1 整车非线性动力学模型
为对整车电机驱动转矩控制策略进行研究与分析,首先建立某阿克曼转向轮毂电机电动汽车整车7自由度动力学模型。模型建立时,假设:
车辆质心位于左右对称面上;忽略越野工况,则不考虑车辆的俯仰、侧倾、垂向运动和车轮的垂向运动;假设转向时,两前轮转角相同。
利用牛顿第二定律,对车辆的纵向自由度、侧向自由度、横摆自由度和四个车轮的旋转自由度列动力学方程为:

其中,m为整车质量;Iz为悬挂质量绕z轴的转动惯量,Je为车轮转动惯量,ωij为车轮旋转角速度,Ti为车轮h驱动力矩(制动时为负值),Fzij为地面法向反作用力,f滚动阻力系数,Re为车轮半径。
3、基于最优附着裕度的转矩分配
3.1 控制目标
本文将以最优附着裕度为控制目标进行电机驱动转矩分配。此种控制方法的控制目标函数为:

其中:Fxi, Fyi, Fzi分别为各车轮的纵向力、侧偏力和垂直载荷。轮胎的侧向力采用HSRI轮胎模型的表示方式:

其中:各参数分别为各轮胎的滑移率,侧偏角,静态纵向刚度和侧向刚度。此种控制方法的优化目标即为使P最小,此时便可充分利用轮胎与地面间的附着能力。
3.2 仿真分析
以前文的整车动力学模型为基础,对最优附着裕度驱动力矩分配控制策略进行验证,验证方式为,利用虚拟样机仿真手段,仿真结果如图:

图2 最优附着裕度分配控制策略仿真结果
由上图可知,在最优分配策略作用下,车辆的车速先达到最大速度。在驱动过程中,各轮胎的垂直载、滑移率等出现了明显的差距,则此时各轮胎的附着裕度相差较大,而平均分配策略下车辆各驱动电机输出转矩相同,明显不适于当前工况。但最优分配策略下,各驱动电机输出转矩有明显的差异,此时,各驱动电机根据具体工况输出了符合其附着能力情况的驱动力矩,增强了车辆的动力性。
3.3 车辆横摆力矩控制分配
轮毂电机电动汽车可以通过控制电机转矩,轻松的实现对直接横摆力矩的控制。轮毂电机的驱动转矩可以快速、精确、独立的响应。所以电机驱动直接横摆力矩控制相对于主动制动横摆力矩控制更加直接和容易实现。因此综合的制动转矩分配控制策略应该是:根据车辆的状态通过控制车辆纵向的驱动力矩或者制动力矩来达到控制车身的横摆力矩的效果。
本文,以提高低速转向的动力性和高速转向的稳定性为目的,制定了如下图所示控制策略。

图3 动力学转向参考模型横摆MAP图
在0-30km/h的低速区间内,ESP系统不参与工作,以保证低速区间的直驶动力性。在30-60km/h的中速区间内,ESP系统开始参与工作,这段区间的目标是提高机动性、但又不与原车辆相差太多,设计其中性转向倍数为 0.85-1倍,之所以从1倍开始降低,也是因为需要保证车辆在进入30km/h以上区间内,ESP系统不会突然将车辆操纵特性改变太多,随着车速增加,倍数逐渐降低,换言之车辆的不足转向特性逐渐增强,这与一般车辆的操纵感受相同。在60-100km/h的高速区间内,ESP系统的目标是降低机动性、提高稳定性并与原车辆操纵性能感受不至相差过多,此时倍数斜率有所降低,换言之,在原来的基础上增大不足转向特性,也就是增强车辆的稳定性。
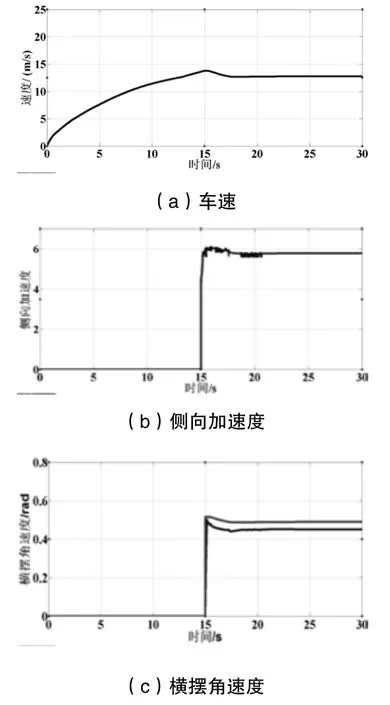
图4 横摆力矩控制仿真结果
同样基于上文中的整车动力学模型对ESP控制策略进行仿真分析,结果如图4。
图5中给出了12°前轮转角15秒阶跃输入并付诸ESP系统作动时车辆的操纵稳定性表现,车辆此时仍处于中高速度段,但侧向加速度已经高达0.6g,ESP系统控制目标仍然是提高车辆机动性。图中反应了理想横摆角速度和实际横摆角速度的对比,车辆不足转向特性被明显削弱,随着稳态时间的不断推进,车辆的横摆角速度响应并没有增大或减小,换言之,车辆严格表现出了与中性转向呈某种倍数关系的“假中性转向”,这一点,是我们希望看到的。但是也出现了明显不足,车辆的横摆角速度并没有与理想横摆角速度严格重合,分析认为:这是因为车辆此时的侧向加速度明显达到了较大值,基本处于车辆转向极限边缘,故而对车辆操纵特性的控制已处于相对“吃力”阶段。
4、结论
近年来,轮毂电机电动汽车由于其传动链短、机械结构简单、驱动轮控制灵活性高等特点,得到了大力发展。在电动汽车中,电机控制是整车控制的重点部分,而电机转矩分配控制又是电机控制的这一重点之中的难点。所以主要针对这一重点做了如下研究:
(1)针对电机驱动力矩控制策略,简单对比了平均分配控制策略和最优附着裕度控制策略下车辆的动力学性能表现。结果证明,最优附着裕度控制策略下,各驱动电机能根据各车轮的工况驱动车辆,充分利用轮胎与地面间的附着能力,车辆动力性能得到明显提高。
(2)对轮毂电机横摆力矩控制策略进行研究。基于提高中、低速转向机动性和高速转向稳定性的目的,设计了ESP控制系统,且仿真结果表明,该控制策略效果良好。
[1] 陈清泉,孙逢春,祝嘉光.现代电动汽车技术[M].北京理工大学出版社.
[2] 余卓平,熊璐.分布式驱动车辆动力学控制系统发展现状[J],机械工程学报.2013.
[3] 边耀璋.汽车新能源技术[M].人民交通出版, 2003.
[4] Manfred Mischke.汽车动力学[M].北京: 清华大学出版社, 2009.
Research on torque distribution and yaw moment control of electric vehicle
Cao Jingzhe, Li Zhonghao
( Automobile School of Chang'an University, Shaanxi Xi'an 710064 )
Due to the outstanding advantages in structural arrangement, power and other aspects of the use of in-wheel motor drive has become an important future direction of the car. In this paper, on the use of in-wheel motor drive auto-depth analysis, vehicle dynamics model, the tire driving force distribution, simulation of the yaw moment control. The results show that the in-wheel motor can significantly improve the power performance and handling stability of the vehicle.
electric vehicle; hub motor; Torque distribution; Yaw moment control
U463.3
A
1671-7988(2016)07-11-03
曹兢哲,就读于长安大学。
10.16638/j.cnki.1671-7988.2016.07.004
猜你喜欢
农业装备与车辆工程(2022年2期)2022-10-30
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年5期)2022-04-02
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
新视线·建筑与电力(2021年2期)2021-09-10
汽车实用技术(2021年3期)2021-02-24
直升机技术(2020年2期)2020-06-16
电机与控制学报(2018年9期)2018-05-14
山东青年(2016年12期)2017-03-02
