
自动化港口AGV调度配置仿真分析
2016-05-25 00:37韩晓龙樊加伟
重庆交通大学学报(自然科学版) 2016年5期
韩晓龙,樊加伟
(上海海事大学 物流研究中心,上海 201306)
自动化港口AGV调度配置仿真分析
韩晓龙,樊加伟
(上海海事大学 物流研究中心,上海 201306)
针对自动化集装箱港口中的AGV(automated guided vehicle)的调度策略和数量配置问题,利用专业仿真软件eM-Plant建立了包括岸桥、AGV、场桥和堆场资源在内的集装箱港口仿真模型,分析不同的AGV调度策略及AGV配置数量对集装箱港口装卸系统效率的影响。设计仿真了3种AGV调度策略,得出不同的AGV调度策略及配置数量很大程度上影响了整个集装箱港口装卸系统的效率。最后根据分析结果,给出集装箱港口对于AGV的调度和数量优化的配置建议。
交通运输工程;集装箱港口;AGV;仿真模型
0 引 言
随着经济全球化的发展,集装箱运输业也进入了一个高速发展期。集装箱港口一方面要面对日益增长的集装箱吞吐量带来的巨大压力,另一方面又要思考如何减少成本投入,提高整个集装箱港口系统的作业效率,增加港口效益,才能在港口之间的竞争中取得优势。大多数集装箱港口,为应对日益增长的需求,都在努力考虑如何在不投资新土地或者码头的情况下,尽可能地提高整个集装箱港口的作业效率。自动化集装箱港口系统恰恰可以有效地满足港口提高效率和降低成本的需求。
AGV(automated guided vehicle,自动导引运输车)作为港口自动化的重要组成部分,和传统集装箱码头的集卡相比,具有包括无人驾驶、自动导航、定位精确、路径优化以及作业安全等众多优点,在包括一些高端生产制造企业等许多自动化领域得到了广泛应用。目前集装箱港口的AGV技术也趋于成熟,AGV正逐渐取代集卡成为集装箱港口的主要水平运输工具。
国内外许多学者,针对集装箱港口系统中的水平运输工具的调度和配置做出了许多研究。张莉等[1]建立了单船装卸运输仿真模型,研究集卡配置数量和集卡速度对船舶装卸时间乃至整个港口装卸系统的影响。曹庆奎等[2]利用蚁群算法,对集装箱港口的集卡路径进行优化。李浩渊等[3]运用仿真模型与优化算法相结合的基于仿真的优化方法(SBO),对集装箱码头动态集卡配置问题进行研究。P.ANGELOUDIS等[4]考虑到自动化集装箱港口中的不确定性,提出了解决AGV配置问题的算法。在集装箱港口仿真方面,WON Youmg-yan等[5]采用面对对象的方法,建立了整个集装箱港口的仿真模型进行研究分析。韩晓龙等[6]通过建立集装箱港口装卸系统的仿真模型对比分析,做出装卸工艺选择的决策。
通过这些学者的研究可知,对于集装箱港口水平运输工具的研究大多还是集中在集卡的调度配置和路径优化上,对于AGV的调度和配置的研究比较少。集装箱港口仿真问题中,多是对传统集装箱港口整个系统的仿真,缺少自动化码头的仿真研究。笔者利用专业的仿真软件eM-Plant建立包括岸桥、AGV、场桥、堆场整个系统的仿真模型,通过对不同的AGV调度策略下以及不同AGV数量配置下的模型的仿真模拟,进行结果对比分析,为决策者提供建议。
1 问题描述
1.1 自动化港口作业流程
通常的集装箱作业流程为:当船舶进港后首先进行泊位分配,进入分配好的泊位之后,根据船舶装卸集装箱量进行岸桥配置;进入操作阶段后,码头依据船公司提供的数据进行配载并进行岸桥的调度,同时配置适当数量的集卡进行集装箱的搬运;堆场根据船舶装卸的集装箱量安排堆存位置和调度场桥。
自动化集装箱港口为了减少生产操作人员,实现高度自动化和信息化,采用AGV作为水平运输工具,自动化轨道式龙门吊作为堆场作业设备,组成岸桥、AGV、自动化轨道吊的新型装卸工艺系统。自动化集装箱港口的作业流程为,岸桥将集装箱从舱内吊出并放置在AGV上,AGV装载集装箱后行驶到指定堆场前沿的装卸点,自动化轨道式场桥在装卸点取箱放入堆场的指定箱位。和传统的集装箱港口相比,自动化港口的AGV不用进入堆场箱区,生产操作人员少,自动化程度高,大大提高了港口的生产能力和经济效益。
笔者将以上述流程作为依据,建立一个单船卸船作业仿真模型,主要针对AGV不同的的调度策略和数量配置进行仿真,对比分析结果得出结论。
1.2 AGV的运输特点
自动化港口的水平运输是整个集装箱港口装卸作业流程中十分重要的一环。AGV水平运输系统主要包括了AGV与岸桥的作业、AGV水平运输以及AGV与场桥的作业3个部分。AGV作为自动化港口水平运输的主要工具表现出的特点如下:
1) 自动化程度高:除了体现在无人驾驶、自动导航、精确定位等方面外,AGV还具有能连续工作超过24 h,装备多种通讯接口保证及时、迅速的信息交换等优势。
2) 柔性化设计、作业灵活性高:由于集装箱船到港、靠泊的时间受到了很多因素的影响,具有很大的不确定性,因此AGV的柔性化设计帮助集装箱港口,做出新的调度策略来应对各种不确定因素的影响。
3) 安全性好:AGV的应用减少了自动化码头操作人员的配置,也大大降低了发生意外导致人身安全和设备安全受到威胁的风险。
4) 绿色生产:AGV采用电力这种清洁能源作为生产作业的主要能源,可以减少温室气体的排放,减少污染,降低能源成本。
1.3 AGV的调度策略
AGV的调度策略问题是一个得到广泛关注和研究的问题[7]。目前,针对自动化集装箱港口,最被广泛了解和运用的几个调度策略如下:
1) 随机作业中心策略:在所有作业的岸桥中随机选择一个进行AGV调度;
2) 最小运输时间/距离策略:该原则通过调度离岸桥最近(即到岸桥时间最短/距离最近)的空闲AGV来最小化空闲AGV的运输时间;
3) 最大运输时间/距离策略:调度离岸桥最远的空闲AGV,该原则通常用作实验对比分析;
4) 队列最大策略:优先把AGV调度给排队队列更长的岸桥;
5) 修改后的先到先服务策略:保证岸桥在之前作业完成之前只能分配不多于1个的AGV,把AGV调度给先收到卸货订单的岸桥;
6) 随机车辆策略:作业被随机分配给任何一个空闲的AGV;
7) 空闲时间最长车辆策略:空闲时间最长的AGV被优先调度;
8) 最少调度车辆策略:被调度次数最少的AGV被优先调度;
虽然说作为研究目标的调度策略越多,越能提高AGV的利用率,提高吞吐量,减少排队长度和平衡作业之间的负载,但是具体的仿真实验中,还是要选取适量适合当前模型的调度策略来研究。
2 集装箱港口仿真建模
2.1 AGV仿真的特点
把AGV作为水平运输工具的集装箱港口仿真和把集卡作为水平运输工具的集装箱港口仿真在仿真模型的建立、参数设置、仿真方案的设计等方面都有很大不同。具体的区别对比如表1。

表1 AGV仿真和集卡仿真的对比
(续表1)

集卡仿真AGV仿真行驶路线行驶区域比较广,不固定在规定好的路线或轨道上行驶堆场交通状况内外集卡都要进入堆场,会产生交叉作业AGV不会与外卡交叉作业调度作业模式大多是传统的作业线调度模式,也有一些作业面调度模式动态的作业面调度模式
2.2 仿真模型
由于笔者主要的研究对象是AGV的调度策略和配置数量,所以只针对单船卸货模型进行仿真研究,对集装箱从泊位运输到堆场的这一过程进行仿真实验。图1是仿真模型布局。

图1 eM-Plant软件中的仿真模型布局Fig.1 Simulation model layout in eM-Plant
2.3 仿真流程
仿真模型模拟的是船从进入泊位开始1个工作日(16 h)内的卸船作业流程。模型的初始状态是集装箱船靠泊港口,AGV都在等候区域待命,场桥都位于堆场前沿待命。仿真流程是岸桥从船上提起集装箱,自动化港口控制室的生产过程控制系统(PCS),根据调度策略对AGV发出指令,AGV根据指令从等候区行驶到岸桥下停车点,检查是否有排队的AGV再进行装箱作业,岸桥将集装箱放置在AGV上,AGV将集装箱运输到指定的堆场,检查场桥是否空闲,场桥将集装箱放入堆场的指定箱位,AGV等待指令调度。仿真模型的流程如图2。
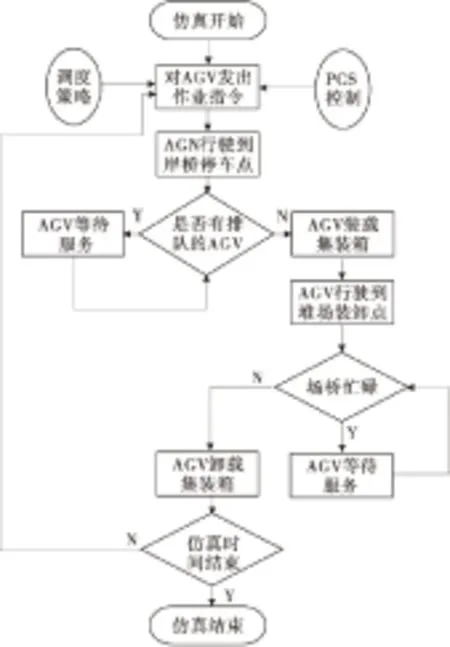
图2 集装箱港口卸船作业仿真流程Fig.2 Simulation flow chart of unloading operation
2.4 参数设计
本模型中集装箱船的载箱量为2 000 TEU,所有集装箱都为标箱。如仿真模型布局图1,分别配置3台岸桥和5台场桥。岸桥的作业速度为30箱/h,场桥从AGV上的取箱时间为60 s,AGV空载和满载的速度分别为4 m/s和2 m/s。整个模型的仿真时间为16 h。
参照1.3节的AGV调度策略结合仿真模型设计3种调度策略进行仿真实验,分别为
1) 循环调度:按顺序依次调度每一个AGV,循环往复;
2) 随机调度:随机选择一个空闲AGV调度;
3) 最短距离调度:选择离岸桥距离最小的空闲AGV进行调度。
2.5 评价指标
集装箱港口的装卸作业效率是衡量一个集装箱港口综合服务水平的重要指标[8]。提高装卸设备的利用率,减少排队和等待的时间都是降低运营成本提高整体作业效率的有效措施。结合集装箱港口的特点和本文建立的限时集装箱港口卸船作业仿真模型,主要的评价指标如下:
服务箱数:仿真结束时,从集装箱船运输放置到堆场的指定箱位的集装箱数。
排队箱数:仿真结束时,仍在作业队列中没有到堆场指定箱位的集装箱数。
AGV利用率:∑(装载时间+卸载时间+移动时间)/∑(装载时间+卸载时间+移动时间+等候时间)×100%。
3 仿真结果分析
3.1 不同调度策略对作业效率的影响
配置20辆AGV,分别使用循环调度,随机调度和最短距离调度3种策略运行仿真模型,运行结果整理如表2。
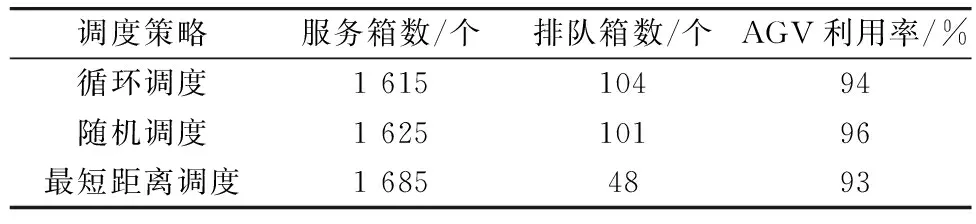
表2 不同调度策略下的港口作业效率评价指标对比
通过表2的数据对比可见,在配置AGV数量一定的情况下,不同的调度策略对港口的作业效率有很大影响,采用最短距离调度策略的仿真方案的服务箱数最多且排队箱数最少,作业效率明显高于其他2种方案。3种调度方案的AGV利用率分别为0.93,0.94和0.96,差幅不足2%,调度策略对AGV利用率影响不大。因此采用最短距离调度策略有利于提高港口的作业效率。
3.2 AGV的配置数量对作业效率的影响
采用最短距离调度策略,配置AGV的数量为15至25,运行仿真模型,得到的AGV利用率如图3。
采用最短距离调度策略,配置AGV的数量为15~25,运行仿真模型,得到的服务箱数和排队箱数对比结果如图4。
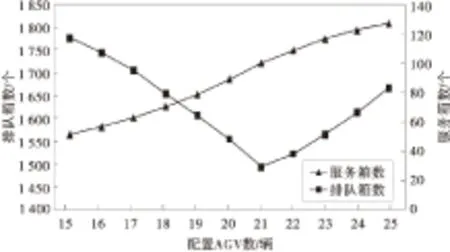
图4 AGV配置数量对服务箱数和排队箱数的影响Fig.3 Relationship between AGV configuration quantity,served containers and containers in queue
在确定AGV调度策略的基础上,随着配置AGV数量的增多,集装箱港口卸船作业的服务箱数有一定程度的增加,当AGV数量增加到21辆以后,服务箱数的增幅逐渐减小,增长速度变缓。随着配置AGV数量的增多,排队箱数逐渐减少,当AGV数量增加到21辆时,排队箱数达到最小值29,从22辆开始,排队箱数随着AGV数量的增加而增加。因此配置21辆AGV时,集装箱港口的作业效率最高。
通过3.1节和3.2节对比分析可以得出3个主要结论:① 3种调度策略中最短距离调度策略服务的集装箱数量最多,作业效率最高,AGV的调度策略决定了集装箱港口的整体作业效率;② 增加配置AGV的数量会使AGV的利用率下降,影响整体作业效率;③ 随着AGV数量的增加,作业效率有一定程度的提升,但AGV过多导致集装箱作业排队过长,等待的AGV堵塞道路,影响整体作业时间。因此合理配置AGV数量可以提升卸船速度,减少AGV的排队等候时间,提高港口的整体作业效率。
4 结 语
笔者根据自动化集装箱港口以及AGV的特点,使用专业仿真软件eM-Plant通过对不同AGV调度策略和配置数量下的岸桥、AGV、场桥组成的集装箱港口卸船作业模型进行一定时间的仿真。对仿真结果进行综合分析,发现不同AGV调度策略很大程度上影响集装箱港口的作业的效率。根据集装箱港口的实际情况合理增加港口配置AGV的数量可以提升集装箱港口的作业能力,但过多地配置AGV不仅提高成本,还会造成AGV利用率的下降,影响整个港口的作业效率。由于整个集装箱港口物流系统涉及范围很广,笔者只针对卸船作业系统进行了仿真研究,对集装箱港口系统整个装卸、作业、大门、铁路等系统的研究还有待进一步提高。
[1] 张莉,霍佳震.基于单船装卸运输模型的集卡配置仿真研究[J].系统仿真学报,2006,18(12):3532-3535. ZHANG Li,HUO Jiazhen.Configuring container truck optimization based on simulation model of single ship handling and transportation on container terminal[J].JournalofSystemSimulation,2006,18(12):3532-3535.
[2] 曹庆奎,赵斐.基于遗传蚁群算法的港口集卡路径优化[J].系统工程理论与实践,2013,33(7):1820-1828. CAO Qingkui, ZHAO Fei. Port trucks route optimization based on GA-ACO[J].SystemsEngineering—Theory&Practice,2013,33(7):1820-1828.
[3] 李浩渊,汪定伟.集装箱码头动态集卡配置的并行仿真优化方法[J].系统仿真学报,2009,21(14):4243-4247. LI Haoyuan,WANG Dingwei. Parallel simulation-based optimization on dynamic truck configuration of container terminals[J].JournalofSystemSimulation,2009,21(14):4243-4247.
[4] ANGELOUDIS P, BELL M G H.An uncertainty-aware AGV assignment algorithm for automated container terminals[J].TransportationResearchPartE:LogisticsandTransportationReview,2010,46(3):354-366.
[5] WON Youmg-yun,YONG Seok-Choi. A simulation model for container-terminal operation analysis using an object-oriented approach[J].InternationalJournalofProductionEconomics,1999,59(1):221-230.
[6] 韩晓龙,丁以中.集装箱港口装卸作业仿真系统[J].系统仿真学报,2006,18(8):2366-2369. HAN Xiaolong,DING Yizhong. Simulation system of container terminal charge/discharge operations[J].JournalofSystemSimulation,2006,18(8):2366-2369.
[7] LIU Chin-I, JULA H, VUKADINOVIC K, et al. Automated guided vehicle system for two container yard layouts[J].TransportationResearchPartC:EmergingTechnologies,2004,12(5),349-368.
[8] BIELLI M, BOULMAKOUL A, RIDA M. Object oriented model for container terminal distributed simulation[J].EuropeanJournalofOperationalResearch,2006,175(3):1731-1751.
Analysis of AGV Dispatching and Configuration Simulation of Automated Container Terminals
HAN Xiaolong,FAN Jiawei
(Logistic Research Center, Shanghai Maritime University, Shanghai 201306,P.R.China)
To analyze the efficiency of automated container terminal handling operation system under different AGV (automated guided vehicle) dispatching rules and configuration,the simulation software eM-Plant was used to build a container terminal simulation model which included quay crane,AGV, yard crane,and yard resource.The analysis of simulation data shows that different dispatching rules and configuration of AGV have a great influence on the whole efficiency of terminal operation system. Finally, some strategies and recommendations on AGV dispatching and configuration optimization were suggested for optimization of automated container terminals.
traffic and transportation engineering;container terminal;AGV;simulation model
10.3969/j.issn.1674-0696.2016.05.29
2015-03-23;
2015-05-21
上海市科委基金项目(11510501900)
韩晓龙(1978—),男,山东潍坊人,副教授,博士,主要从事供应链与物流管理方面的研究。E-mail:superhxl@163.com。
樊加伟(1990—),男,江苏南京人,硕士,主要从事集装箱港口优化与仿真方面的研究。E-mail:lyrafjw@163.com。
U691+.3;TP391.9
A
1674-0696(2016)05-151-04
猜你喜欢
智能建筑电气技术(2022年2期)2022-02-06
集装箱化(2020年7期)2020-06-20
现代装饰(2019年7期)2019-07-25
中国航海(2019年2期)2019-07-24
运筹与管理(2019年1期)2019-02-15
天津科技(2018年12期)2019-01-02
中国公路(2017年8期)2017-07-21
集装箱化(2016年8期)2016-10-20
专用汽车(2015年2期)2015-03-01
集装箱化(2014年12期)2015-01-06
