
可变形爬壁机器人研究及对我国机器人标准制定工作的建议
2016-06-15 08:42宁思衡金扬皓刘凌
中国质量与标准导报 2016年2期
宁思衡 金扬皓 刘凌
(清华大学附属中学)
可变形爬壁机器人研究及对我国机器人标准制定工作的建议
宁思衡 金扬皓 刘凌
(清华大学附属中学)
摘要:根据我国目前爬壁机器人研究的进程,参照机器人现行国家标准,设计出一种能在光滑平面上采用真空吸附方式灵活移动的爬壁机器人,介绍了爬壁机器人的研究背景、分类、技术路线与参数定义、详细设计过程,研制了上位机程序与控制系统软件,经组装试验验证了爬壁的可能性,结合爬壁机器人的研制,对我国机器人标准的制定进行了探讨并提出建议。
关键词:爬壁机器人 真空吸附 可变形 机器人标准
1 课题研究背景与意义
爬壁机器人广泛用于国民经济生产等各个领域,在核工业可用于对核废液储罐进行视觉检查、测厚及焊缝探伤;在石化企业可用于对圆柱形大罐或球形罐的内外壁面进行检查或喷砂除锈、喷漆防腐;在建筑行业可用于喷涂巨型墙面、安装瓷砖、壁面清洗、擦玻璃;在消防部门可用于传递救援物资;在造船业可用于喷涂船体的内、外壁等,因此目前世界各国都投入大量的人力、物力进行爬壁机器人的基础和应用研究[1]。
而机器人产业的发展与相关企业标准、行业标准、国家标准和国际标准密不可分,随着机器人产业的发展,国内和国际上针对机器人相关标准的制定也在不断深入,为机器人的产业化研制和应用提供了参考和借鉴,但是,目前我国并未建立完善的机器人标准体系,在具体标准的制定上具备广阔的发展空间[2]。
课题组在参照现行国家机器人标准研制基于真空吸附的框架式移动爬壁机器人的同时,深刻体会到制定并完善我国机器人标准的重要性。
2 爬壁机器人与我国机器人标准概况
2.1爬壁机器人
自1966年日本大阪府立大学上学部任西亮讲师利用电风扇产生的负压吸附制作了第一台壁面移动机器人原理样机以来,爬壁机器人技术在世界范围内得到了迅速发展,也相继研制出了各种不同种类的样机。我国已有哈尔滨工业大学、上海交通大学、清华大学精仪系机器人及其自动化研究室、北京航空航天大学等高校及科研院所致力于相关方面的研究,也取得了丰硕的成果。
爬壁机器人最重要的特点是吸附在壁面上,吸附产生机理的不同爬壁机器人的特点也大有不同。通过近20年的发展,爬壁机器人的吸附方式主要有静电吸附、真空吸附、负压吸附、旋翼吸附、磁力吸附以及一些比较特殊方式的吸附等;爬壁机器人的移动机构可以模仿地面移动机器人的方式,目前主要有轮式、履带式、框架移动式以及关节腿足式。
相关文献对爬壁机器人的关键技术、性能指标、关键系统的设计进行了详细的描述[3-5]。
2.2我国机器人标准概况
我国已有的工业机器人国际标准是多年前综合和兼容发达国家已有国家标准(美国、日本等)、区域标准(欧盟)等的基础上制定的,没有充分考虑到发展的新兴市场的现状和需求,国家并未建立针对爬壁机器人的专用标准,课题组在爬壁机器人研究的过程中主要参考和借鉴了我国在工业机器人方面的主流标准,如GB/T 12644—2001《工业机器人特性表示》、GB/T 12642—2013《工业机器人性能规范及其试验方法》、GB/T 19399—2003《工业机器人编程和操作图形用户接口》、GB/T 16977—2005《工业机器人坐标系和运动命名原则》等。
3 可变形爬壁机器人设计
3.1外形设计
参照GB/T 12644—2001中“5.4 机械结构”“5.7外形尺寸和质量”的要求[6],利用Solid Works绘制了三个主体的三维图形,其载物板大小为280mm×100mm×5mm,其上搭载了电磁阀,真空泵,ARDUINO控制板与继电器,在外形设计时考虑到移动方式的符合性要求。
3.2吸附装置及其原理
吸附装置主要由两部分构成:负压发生装置;吸附腔体。
3.2.1负压发生装置
本机器人选用真空泵作为负压发生装置,一是为了获得更稳定的吸附力,二是为了减少噪音。
参照GB/T 12642—2013中“6 性能测试条件与性能检测方法”的要求[7],在选用真空泵的时候主要考虑的因素为3个:抽气速度、真空度、体积。抽气速度越快,气体泄漏的影响会越小;真空度越大,提供的吸力越大;体积越小,越好安装在载物板上。通过对比,最终选定了一款大功率真空泵,其具体参数如下:
型号:VN-C4;工作电压:DC9V-14V;真空度:-85kPa;流量:40L/min;额定电压:DC12V;功率:42W。
3.2.2吸附腔体
参照GB/T 12642—2013中“4 单位”“6.8.6.2试验轨迹的形状和尺寸”要求,吸附腔体选用的是机械手上吸取用的吸盘,分为两种不同大小的吸盘,一个半径为30mm,一个为40mm,其中:30mm的吸盘应用于中间部分,共4个;40mm的吸盘应用于两边主体,每边各两个。通过实践,吸盘与真空泵配合可以适应比较常见的墙面,如粉墙、玻璃等。
3.2.3电磁阀
本机器人用真空电磁阀控制吸盘的开关,通电时联通气管,断电时联通大气,达到一个快速抬起的效果。
参照GB/Z 19397—2003《工业机器人电磁兼容性试验方法和性能评估准则指南》中“6.5 与机器人应用有关的推荐测试指标”[8],选用的电磁阀为SQW的QVT307,其参数如下:
型号:QVT307;工作电压:12V;压力:0-0.9MPa;功率:5.8W。
3.2.4吸附力
吸附力的大小取决于吸附面积以及真空度决定,本机器人所选用的真空泵可以提供-85kPa的真空度,由8个吸盘提供的吸附面积大约为300cm2,其提供的吸力约为223N。
3.2.5 吸附原理
吸附原理见图1。可变形爬壁机器人将吸附系统改进得更加简单,节约能源。可变形爬壁机器人利用1个真空泵配合3个电磁阀控制8个吸盘,减少了能量损耗,控制更加简便。真空泵使一级气管不断抽气,而电磁阀则控制二级气管的开启关闭,两者配合,达到一个控制多个的目的。而其他负压式爬壁机器人多是采用一个气泵控制一组吸盘的设计,使程序复杂,能量损耗大。
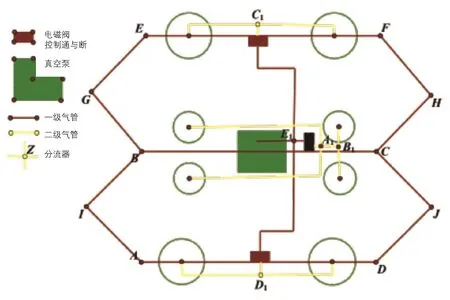
图1 吸附原理图
3.3移动装置和舵机
参照GB/T 12642—2013中“6 性能测试条件与性能检测方法”“7 位姿特性”“8 轨迹特性”及“11面向应用的特殊性能规范”的要求,本机器人所选用的舵机为Power HD 的1501MG型号,主要参数如下:
重量:60g;尺寸:40.7mm×20.5mm×39.5mm;电压6V;力矩17kg/cm;转速0.14s/60°。
移动装置由舵机和机械臂零件组成,每个主体之间都由两个机械臂链接,舵机的选用需要考虑其转速快慢,与力矩大小、转速与舵机之间的配合,以及舵机的稳定性有关,力矩则与舵机的负载重量有关。
3.4控制方式与控制系统设计
参照GB/T 19399—2003中“5 GUI-R元素的定义”及“6 功能和图标”[9]、GB/T 16977—2005中“4坐标系和旋转运动的定义”[10],设计了基于PC机的上位机控制程序和机器人嵌入式控制程序。
控制模块由上位机控制程序以及ARDUINO控制程序组成,将真空泵、舵机控制板、电磁阀、遥控器连接在ARDUINO控制板上,上位机向ARDUINO发送指令,ARDUINO通过相应函数,给这几个模块发送信息,达到控制机器人前进的目的。
本程序总共有两种控制方式,一为执行固定动作组,二为自由控制。
(1)固定动作组
固定动作组分为4个,分别是前进、后退、向左、向右。当鼠标按下相应按钮后,发送数字“1~4”给ARDUINO串口监视器,再由ARDUINO调用已编好的程序,从而控制机器人上下左右移动。
(2)自由控制
在自由操控中,可以控制的是两个信息:吸盘的吸附或张开、单个主体的位置。
控制的方法为鼠标单击一个主体时,发送电磁阀关闭的命令,并将主体定义为可移动,鼠标移动主体随之移动,在结束后发送舵机角度,以及电磁阀开启的命令。最后将中间部分还原到中点。
如:移动中间部分,鼠标单击第一个主体,发送电磁阀关闭命令021(“02”第一个主题,“1”关闭);鼠标移动,主体随之移动到该位置,将舵机角度显示在控制系统上;鼠标放开,发送舵机位置和电磁阀开启命令020。控制界面中包含串口调试工具,8个舵机的角度,以及机器人控制人机界面,见图2。
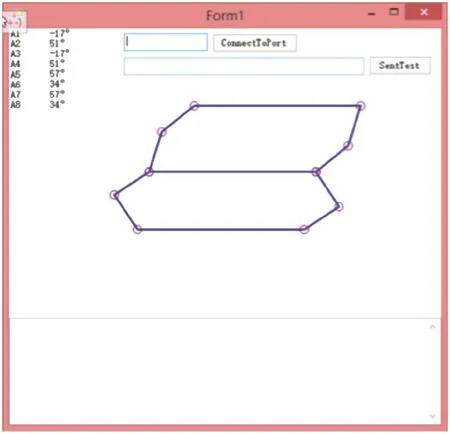
图2 机器人控制人机界面
4 应用验证与机器人标准化工作的建议
4.1应用验证
参照GB/T 12642—2013中“6 性能测试条件与性能检测方法”的要求,经过反复验证,二代可变形爬壁机器人可以在垂直面与平行面上稳定攀爬,如图3。
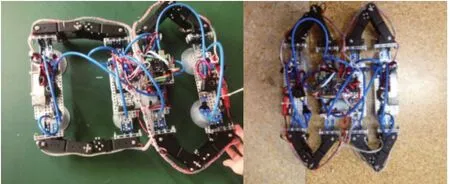
图3 机器人运行图——黑板垂直面与地板水平面测试
该设计在2015年4月获北京市FTC机器人专项比赛一等奖,2015年7月获中国科协组织的第十五届中国青少年机器人创意竞赛一等奖,并获得清华大学附中奖学金。
4.2对我国机器人标准制定工作的建议
爬壁机器人有着潜在的广阔的应用前景,在不远的将来,爬壁机器人必将给国家和社会带来巨大的利益,但同时我们也必须清醒地认识到,目前国内大部分机器人市场份额已由国外大公司占领,我国机器人标准的制定主要有等效采用相关国际标准和国内相关标准委员会组织编撰等方式,现有的机器人相关国家标准多针对工业机器人,随着中国制造2025国家战略与“互联网加+”进程的逐步推进,研制具有自主知识产权的机器人并配套制定专项标准将具有极大的发展空间,专业领域的各类机器人标准的制定也是摆在机器人产业发展面前的一个无法回避的问题,据此提出如下建议:
(1)将机器人研制技术和标准的制定纳入国家战略规划体系,注重产研结合,加大对研制具有自主知识产权机器人科研机构、企业的投入。
(2)建立健全国家机器人标准体系并细化专项标准的目录,本着面向急需、分步制定、配套实施的原则,稳扎稳打,合理推进国家机器人标准制定工作进程。
(3)国家机器人标准体系的建立和完善建议采用上下结合的方式进行:建议采用自上而下的方式建立国家机器人标准体系,即由国家组织专业的技术委员会在广泛深入调研的基础上,结合国家发展战略要求编制、规范具体标准的目录和范围;具体标准的制定采用自下而上的方式,由国内机器人专业科研机构和机器人先进制造企业牵头编制,并逐步上行填充到国家机器人标准体系中。
参考文献
[1]肖立,佟仕忠,丁启敏,等. 爬壁机器人的现状与发展[J]. 自动化博览,2005(1):81-84.
[2]顾冬雷,王硕,王颖. 机器人相关国际和国家标准研究[J]. 机器人技术与应用,2013(5):21-23.
[3]郭成,谈士力,翁盛隆. 微型爬壁机器人研究的关键技术[J]. 制造业自动化,2004,26(7):4-6.
[4][4] 邵浩,赵言正,王炎.单吸盘爬壁机器人的吸附稳定性的分析及计算[J].机械设计,2000(3):41-43.
[5]张春元,黄威,邵容平. 真空系统的设计[J]. 中国空间科学技术,2002(3):44-48.
[6]GB/T 12644—2001 工业机器人 特性表示
[7]GB/T 12642—2013 工业机器人 性能规范及其试验方法
[8]GB/Z 19397—2003 工业机器人 电磁兼容性试验方法和性能评估准则指南
[9]GB/T 19399—2003 工业机器人 编程和操作图形用户接口
[10]GB/T16977—2005 工业机器人 坐标系和运动命名原则
Research on Deformable Wall Climbing Robot and the Suggestions on China's Robot Standards Development Work
Ning Siheng,Jin Yanghao,Liu Ling
( The Affi liated High School of Tsinghua University )
Abstract:According to the process of wall climbing robot research in our country,we designed a type of flexible mobile climbing robot adopted vacuum adsorption method on the smooth plane. This paper introduces the research background and classification,technical route and parameter definition,detailed design process of the robot. We developed PC and control system software and verified the possibility of climbing after assembly tests. We also discussed and put forward the suggestions on robot standards in China combined with the development of wall climbing robot.
Key words:wall climbing robot,vacuum adsorption,deformable,robot standard
