
基于偏置输出3-RRR+(S-P)球面并联机构的仿生髋关节
2016-06-27 04:22杨亚敬孙通帅周玉林
中国机械工程 2016年11期
关键词:仿生学
杨亚敬 孙通帅 周玉林
燕山大学,秦皇岛,066004
基于偏置输出3-RRR+(S-P)球面并联机构的仿生髋关节
杨亚敬孙通帅周玉林
燕山大学,秦皇岛,066004
摘要:首先以偏置输出的3-RRR+(S-P)仿生关节机构为原型机构,依据仿生原则并参照人体股骨结构,确定关节机构的偏置角。然后,提出关节机构工作空间与人体髋关节运动空间相协调的设计原则,进而确定关节机构的安装定位角度,完成人形机器人髋关节设计;建立仿生关节空间与机构空间的映射关系,并对该髋关节的运动学正反解进行求解。最后,通过数值计算证明关节机构可实现人体基本运动,同时使用Xsens Technologies公司的可穿戴式完全无线3D身体惯性跟踪仪及磁性运动跟踪器,采集人体髋关节在实际运动状态下的位姿信息,将获取信息经映射关系转换和反解变换,导入ADAMS模型中进行校验,进一步验证了建立的映射关系、安装定位角度及正反解的正确性。
关键词:偏置输出;仿生学;髋关节球面;并联机构
0引言
人形机器人是机器人领域最活跃的分支之一,其关节的结构和性能直接决定其整体性能,受到国内外学者的广泛关注。人体肌肉群多以并联驱动的形式来完成关节运动。
三自由度球面机构具有结构紧凑、灵活可靠等特点,可用于人体髋关节[1]、灵巧眼[2-3]等,实现空间三自由度的转动。众多学者对该机构进行了分析研究。Tao等[4]提出了一种基于增大机构工作空间和减少杆件之间干涉的系统设计方法,并依据此方法得到了3-RRR球面并联机构的优化结果。杨加伦等[5]基于旋量理论计算,探讨了正交三自由度球面机构位置正反解的方法,获得了机构的雅可比矩阵,运用牛顿迭代法求解得到了3个被动角的数值解,利用指数积公式直观地得到了该机构的位置正解。Saafi等[6]在对三自由度球面机构正运动学进行分析时,采用了冗余传感器的方法,使运动学正解变得简单化,控制精度也大大提高了。文献[2-3,7-12]也对三自由度球面机构进行了相关研究。
另有众多学者对髋关节也进行了深入研究。日本东京大学提出了一种双球面髋关节运动单元,该运动单元采用双球面作为机构原型,具有6个自由度[13]。程刚等[14-15]对3SPS+1PS并联机构的设计和控制进行了分析,对机构的工作空间进行了优化,将此机构应用到人体髋关节,并制作了髋关节实物样机。
侯雨雷等[1]以3-RRR三自由度球面并联机构为原型,在其静力学及刚度特性分析基础之上,从仿生学角度出发,通过植入中心球面副的方式,提出可应用于人形机器人髋关节的3-RRR+(S-P)球面并联机构,实现了静力卸载及刚度均衡。
目前的研究都是对球面机构进行运动学、动力学分析,鲜有将其与人体构型结合,基于仿生关节分析进行关节设计。本文则从仿生学角度出发,通过确定机构偏置角度和安装定位角度,将偏置输出3-RRR+(S-P)球面并联机构[16]应用于人体髋关节,给出仿生关节空间与机构空间的映射关系,求解基于偏置输出3-RRR+(S-P)球面并联机构仿生髋关节的运动学正反解。在此基础上,对本机构模型进行数值验证和具体人体髋关节信息采集分析,进一步说明本文分析结果的正确性和仿生关节的应用价值。
1仿生髋关节空间与人体空间的协调性
人体髋关节的结构属于传统被动球面铰链结构,但是其运动空间明显大于传统被动球面铰链的工作空间[16-17]。研究人体髋关节结构发现,人体股骨与传统被动球面铰链的输出杆有明显不同:股骨整体呈弯拐状,股骨颈与股骨体夹角为55°~62°,如图1所示。同时,人体髋关节的运动范围也存在一定规律性,表1所示为医学统计数据。

图1 人体股骨结构

运动关节关节运动范围度量位置角度(°)髋关节冠状面(oymzm)内摆动95矢状面(oxmzm)内摆动165绕大腿轴旋转65
人体髋关节在运动过程中各个角度间存在耦合,关系十分复杂,为近似获得人体髋关节的运动空间,基于上述数据,同时假定髋关节各个关节运动角度间相互独立,则可获得人体髋关节最大运动空间的形状,如图2所示。

(a)整体形状(b)俯视形状图2 人体髋关节最大运动空间形状
依据仿生设计原则,为使仿生髋关节工作空间包含或等于人体髋关节空间,达到最优仿生效果,将偏置输出3-RRR+(S-P)球面并联机构应用于仿生髋关节,其输出杆轴线向任意方向偏折,释放输出杆绕z轴的转动对机构输出的影响,从而扩大机构的工作空间。
偏置输出的3-RRR+(S-P)仿生关节机构如图3所示。偏置输出杆轴线与直输出杆轴线的夹角称为偏摆角αh。偏置输出杆的末端点P与球心的连线OP是实际输出杆轴线,OP的长度定义为Lt,它与直输出杆轴线的夹角称为偏置角t,其表达式为
t=αh-arcsin(r0sinαh/Lt)
(1)
其中,αh为股骨骨干与股骨颈的夹角。在本仿生机构中,t为动平台z轴与OP的夹角,αh为动平台z轴与输出杆轴线的夹角。
依据人体尺寸模型,机构球半径r0取80mm、股骨颈长度取90mm,大腿(按身高1700mm设计)为473mm。则得到t的取值范围约为46°~54°。
为便于分析,建立机构的结构参数和坐标系如下(图3):α1、α2、β1、β2、η1i、η2i(i=1,2,3),球半径R,其中,η1i(i=1,2,3)为zi1(i=1,2,3)与z11在下平台的投影所成角度;η2i(i=1,2,3)为zi3(i=1,2,3)与z13在上平台投影所成角度。zi1、zi2、zi3为过球心的三条转动副轴线。选取机构的中心点O为坐标原点,建立固定坐标系{C}(Ox0y0z0)、动坐标系{D}(Oxyz)和偏置坐标系{P}(Ox1y1z1)。其中,固定坐标系与支撑杆固连,z0轴与支撑杆轴线重合,正向向上,x0轴由z0轴转到z11轴及右手螺旋法则确定,y0轴由右手螺旋法则确定;动坐标系与输出杆固连,z轴与直输出杆轴线重合,正向指向外,x轴由z轴转到z13轴及右手螺旋法则确定,y轴由右手螺旋法则确定;偏置坐标系与输出杆固连,假定直输出杆和偏置输出杆所构成的平面与Ozy面重合,取OP为z1轴,正向向外,x1轴与x轴正向重合,y1轴由右手螺旋法则确定。
当t=0°时,偏置输出的3-RRR+(S-P)仿生关节机构的安全工作空间的形状及相对固定坐标系的位置如图4所示。当46°≤t≤54°时,仿生关节机构的安全工作空间变大,其形状及相对固定坐标系的位置如图5所示。
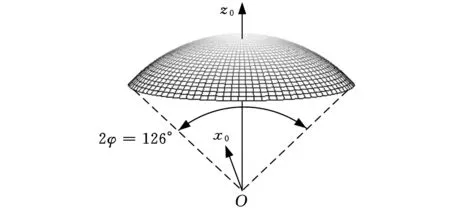
图4 3-RRR+(S-P)球面并联机构的安全工作空间
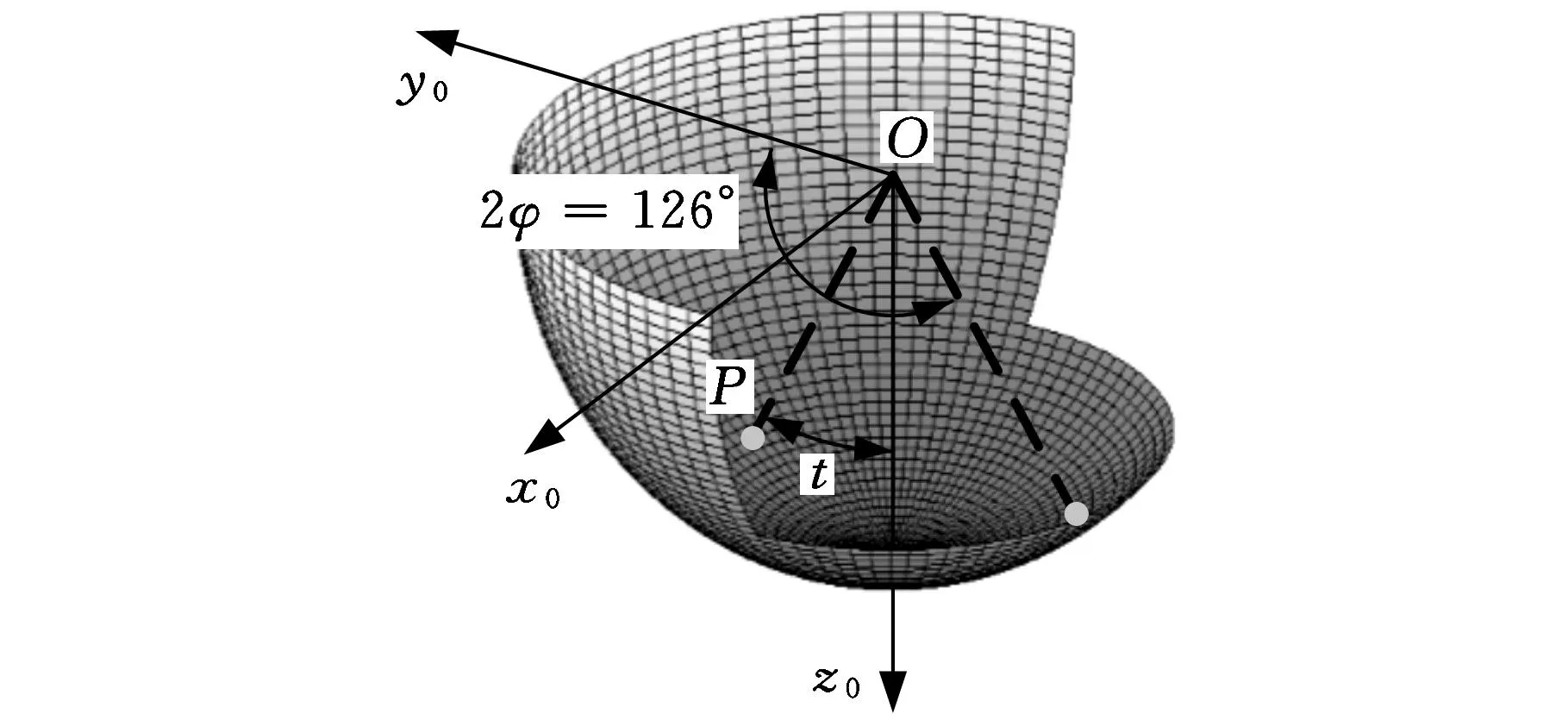
图5 偏置输出的3-RRR+(S-P)机构的安全工作空间
对比图2与图5不难发现,偏置输出3-RRR+(S-P)球面并联机构的安全工作空间可以完全覆盖人体髋关节的最大运动空间,它完全可以满足机构工作空间与人体髋关节运动空间的协调性要求。综上,该偏置输出3-RRR+(S-P)球面并联机构满足仿生运动要求,可应用于仿生髋关节。
2安装定位角度与空间映射关系
2.1安装定位角度α0、β0、γ0
经研究人体骨盆和髋关节的实际结构发现,髋关节的髋臼的中心线并不是位于球窝的中心位置,而是向前下方倾斜的,与各个平面均存在一定的夹角:髋臼中心射线与水平面成30°~40°的夹角,与冠状面之间的夹角呈30°~40°。股骨在矢状面内运动范围较大(-45°~120°),人体髋关节球窝的特点是中性线与水平面存在夹角,男性比较大,约为22°~30°,女性的约为20°~25°,如图6所示,同时,(无论男女)其中性线均向前偏转约12°~20°(与冠状面夹角)。股骨结构如图1所示,股骨骨干呈弯拐形状向两侧伸出,股骨颈与股骨骨干夹角约50°~60°[18]。
在进行仿人髋关节设计时,需考虑髋关节应如何摆放安装,使机构的工作空间(输出杆运动范围)与人的肢体运动范围相协调,两个空间的中心区域重合或机构的工作空间覆盖肢体运动空间。因此按照人体特征,以及仿生关节机构工作空间的对称特性,为确定安装位置,本文提出了基准坐标系相对过渡坐标系安装定位角:α0、β0、γ0,下标“0”表示髋关节。
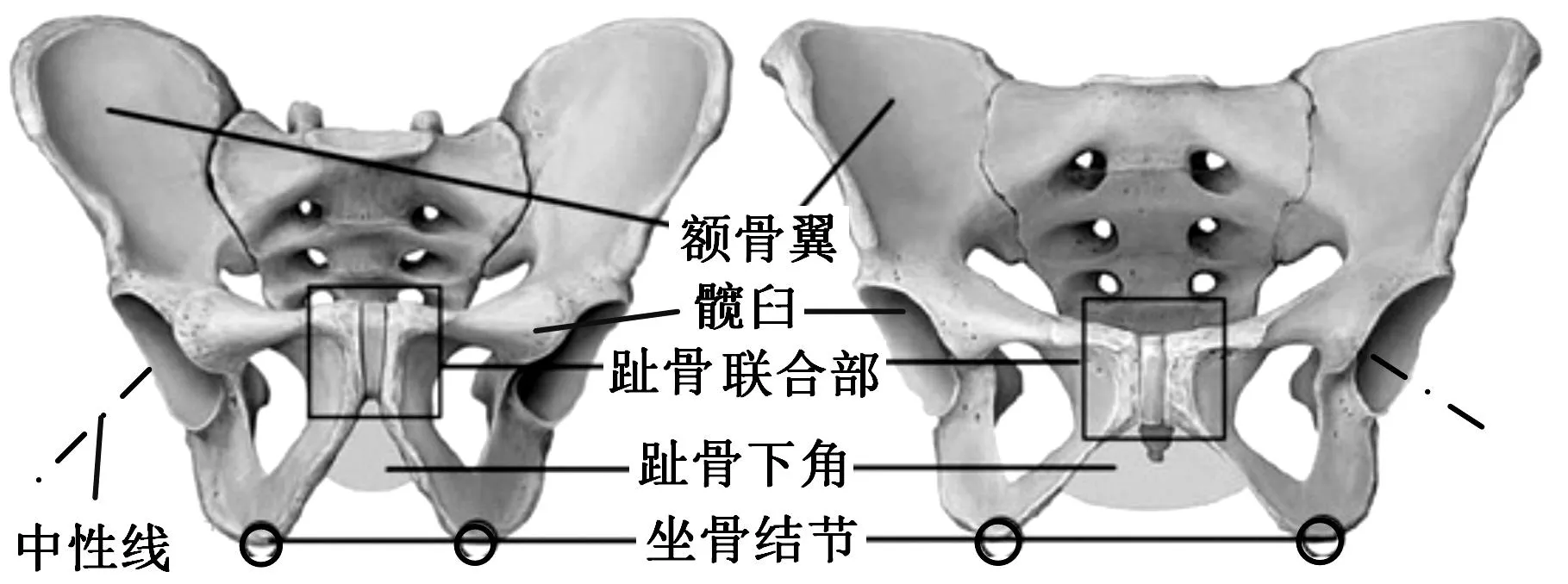
(a)男性骨盆(b)女性骨盆图6 人体骨盆结构

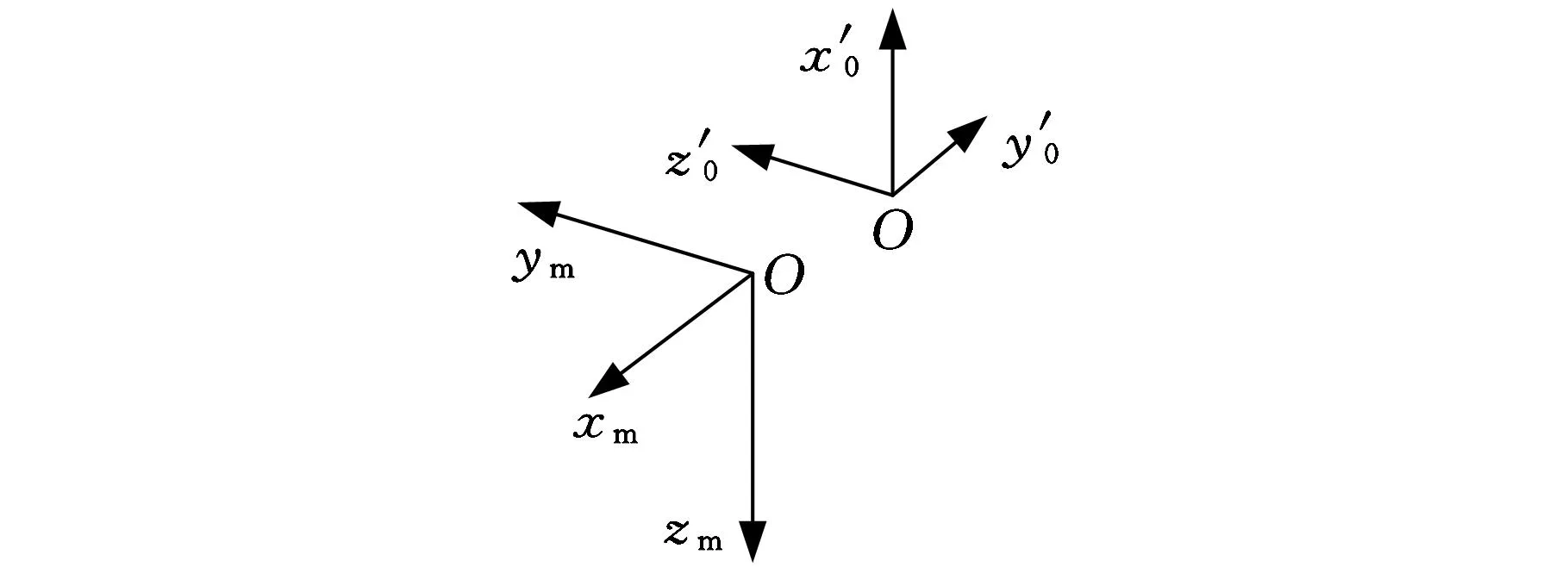
图7 人体坐标系与过渡坐标系
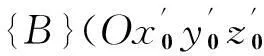
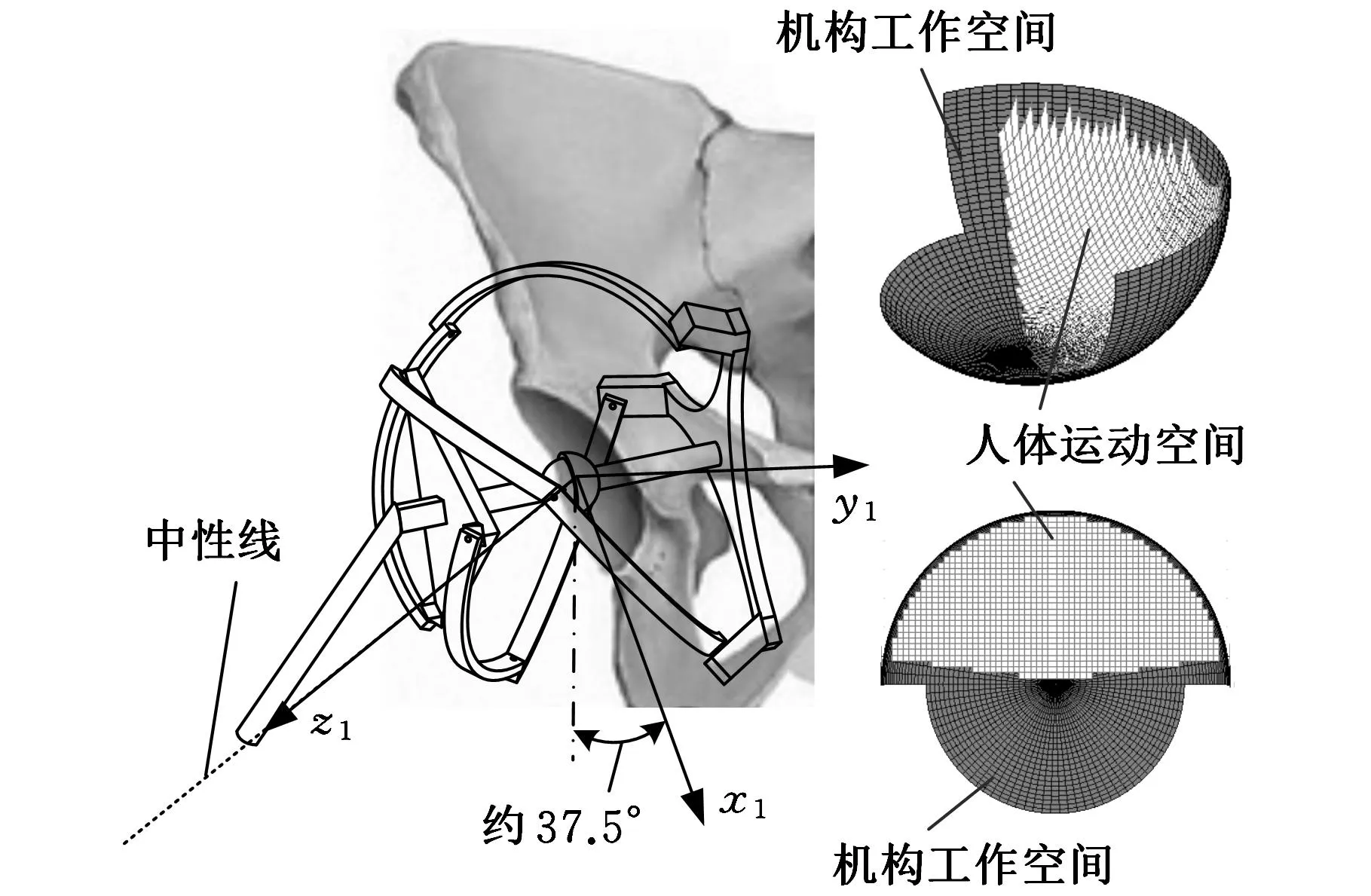
图8 机构安装定位依据
安装到人体中的机构与人体坐标系如图9所示,此时机构的固定坐标系改称为机构在人体中的基准坐标系。根据人体的实际结构,保证机构工作空间与肢体运动范围相协调,兼顾机构工作空间的对称特性,经过反复计算和比对,取基准坐标系相对过渡坐标系安装定位角α0=25°,β0=20°,γ0=45°。

图9 关节安装位置及人体坐标系
2.2仿生关节空间与机构空间映射关系
具有偏置输出的三自由度球面并联仿生关节的输入端为3个驱动电机的转角θ11、θ21、θ31;输出端则为关节肢体在人体坐标系的三个摆角φxzt、φyzt、φzzt,由于关节采用偏置输出、机构在人体中的定位姿态不同,因此两端参数的关系比较复杂。必须建立仿生关节空间与机构工作空间的映射关系,即基于安装定位角度α0、β0、γ0,建立3-RRR+(S-P)并联机构动平台位姿角φx、φy、φz与关节肢体的3个摆角φxzt、φyzt、φzzt的关系。再利用3-RRR+(S-P)并联机构的运动学反解,最终求得3个驱动电机的输入转角与关节肢体的3个摆角的关系。
由图7可知过渡坐标系{B}在人体坐标系{A}中的描述如下:
(2)

式中,s代表sin ,c代表cos ,下同。
基准坐标系{C}在人体坐标系{A}下的描述为

(3)
根据动坐标系在固定坐标系中的描述,求得偏置坐标系{P}在基准坐标系{C}中的描述为
(4)
r11C=cφycφz
r21C=cφysφz
r31C=-sφy
r12C=(sφxsφycφz-cφxsφz)ct+
(cφxsφycφz+sφxsφz)st
r22C=(sφxsφysφz+cφxcφz)ct+
(cφxsφysφz-sφxcφz)st
r32C=sφxcφyct+cφxcφyst
r13C=-(sφxsφycφz-cφxsφz)st+
(cφxsφycφz+sφxsφz)ct
r23C=-(sφxsφysφz+cφxcφz)st+
(cφxsφysφz-sφxcφz)ct
r33C=-sφxcφyst+cφxcφyct
另一方面,肢体运动位姿为φxzt、φyzt、φzzt时,关节肢体上的坐标系{I}在人体坐标系{A}中的描述为
r11I=cφyztcφzzt
r21I=cφyztsφzzt
r31I=-sφyzt
r12I=sφxztsφyztcφzzt-sφxztsφzzt
r22I=sφxztsφyztsφzzt+cφxztcφzzt
r32I=sφxztcφyzt
r13I=cφxztsφyztcφzzt+sφxztsφzzt
r23I=cφxztsφyztsφzzt-sφxztcφzzt
r33I=cφxztcφyzt
肢体在基准坐标系中描述如下:
整理得
(5)
r11D=r11I(sα0sβ0cγ0+cβ0sγ0)+r21I(sα0cβ0cγ0-sβ0sγ0)-r31Icα0cγ0
r21D=r11I(sα0sβ0sγ0-cβ0cγ0)+r21I(sβ0cγ0+sα0cβ0sγ0)-r31Isγ0cα0)
r31D=r11Isβ0cα0+r21Icβ0cα0+r31Isα0
r12D=r12I(sα0sβ0cγ0+cβ0sγ0)+r22I(sα0cβ0cγ0-sβ0sγ0)-r32Icα0cγ0
r22D=r12I(sα0sβ0sγ0-cβ0cγ0)+r22I(sβ0cγ0+sα0cβ0sγ0)-r32Isγ0cα0
r32D=r12Isβ0cα0+r22Icβ0cα0+r32Isα0
r13D=r13I(sα0sβ0cγ0+cβ0sγ0)+r23I(sα0cβ0cγ0-sβ0sγ0)-r33Icα0cβ0
r23D=r13I(sα0sβ0sγ0-cβ0cγ0)+r23I(sβ0cγ0+sα0cβ0sγ0)-r33Isγ0cα0
r33D=r13Isβ0cα0+r23Icβ0cα0+r33Isα0
式(4)、式(5)为同一构件经由不同的途径在同一坐标系下的描述,矩阵中的所有元素对应相等,即
cφysφz=r11I(sα0sβ0sγ0-cβ0cγ0)+r21I(sβ0cγ0-sα0cβ0sγ0)-r31Icα0sγ0
cφycφz=r11I(sα0sβ0cγ0+cβ0sγ0)+r21I(sα0cβ0cγ0-sβ0sγ0)-r31Icα0cγ0
-sφy=r11Isβ0cα0+r21Icβ0cα0+r31Isα0
sφxcφyct+cφycφxst=r12Isβ0cα0+r22Icβ0cα0+r32Isα0
-sφxcφyst+cφxcφyct=r13Isβ0cα0+r23Icβ0cα0+r33Isα0
解方程组求得机构的姿态角函数
(6)
AI=r11I(sα0sβ0sγ0-cβ0cγ0)+
r21I(cβ0cγ0-sα0cβ0sγ0)-r31Icα0sγ0
BI=r11Isβ0cα0+r21Icβ0cα0+r31Isα0
CI=r12Isβ0cα0+r22Icβ0cα0+r32Isα0
DI=r11I(sα0sβ0cγ0+cβ0sγ0)+
r21I(sα0cβ0cγ0-sβ0sγ0)-r31Icα0cγ0
FI=r13Isβ0cα0+r23Icβ0cα0+r33Isα0
依据仿生学原理,经上述过程,定义本仿生髋关节在人形机器人中的安装定位角度为α0、β0、γ0,依据该定位角度和偏置输出角t,综合给出了肢体运动空间与3-RRR+(S-P)机构空间映射关系(φxzt、φyzt、φzzt与φx、φy、φz之间的关系,即式(2)~式(5)),再结合仿生髋关节运动学正反解,就可完成本髋关节的设计和控制系统输入输出的关系。
3仿生髋关节运动学正反解
3.1运动学反解
3-RRR球面并联机构的反解为已知球面三自由度机构上平台相对于下平台的姿态,求输入转角。根据中间转动副ωi和动平台转动副νi之间的约束关系ωi·νi=cosα2(i=1,2,3)可求得机构的运动学反解:
(7)
i=1,2,3
将相关参数代入式(7)整理得髋关节运动学反解:
(8)
其中,参数θ11h、θ21h、θ31h为髋关节驱动器输入角,根据装配条件表达式中的“±”应取“-”,Ai、Bi、Ci是已知参数和机构参数的函数表达式。
3.2运动学正解
3-RRR球面并联机构的正解为已知球面三自由度机构输入转角,求上平台相对于下平台的姿态矩阵,利用两点间距离在不同坐标系中的表达不变,求解运动学正解[8]。
中间转动副轴线方向矢量可表示为在定系中的表达和在动系中的表达。
在定系中的表达式为
(9)
在动系中的表达式为
(10)
其中,φi为中间转动副的转角,i=1,2,3。

所以有
(11)

d1cφ1+d2cφ2+d3sφ1+d4sφ2+d5cφ1cφ2+
d6cφ1sφ2+d7sφ1cφ2+d8sφ1sφ2+d9=0
(12)
h1cφ2+h2cφ3+h3sφ2+h4sφ3+h5cφ2cφ3+
h6cφ2sφ3+h7sφ2cφ3+h8sφ2sφ3+h9=0
(13)
l1cφ3+l2cφ1+l3sφ3+l4sφ1+l5cφ3cφ1+
l6cφ3sφ1+l7sφ3cφ1+l8sφ3sφ1+l9=0
(14)
式中,dk、hk、lk(k=1,2,…,9)为已知参数和机构参数的函数表达式。
引入半角公式:
将半角公式代入式(13),并经过消元最终整理得
(15)
4数值验证与模拟实验
4.1数值验证
原型机构基本参数:α1=90°,α2=90°,β1=60°,β2=45°,上下平台铰链点分别位于等边三角形顶点上,即η11=η21=0,η12=η22=2π/3,η13=η23=4π/3。结合上文求得的安装定位角度,同时取偏置角度t=50°,使用空间间的映射关系,对髋关节在不同运动姿态时,基准坐标系的偏转角进行求解。
如图4所示,3-RRR+(S-P)球面并联机构的安全工作空间为:φx0、φy0在(-63°,63°)内,φz0在(-90°,90°)内,由表2中的计算结果可清晰看出,各个运动姿态所需在基准坐标系的旋转角度,均在机构的安全工作空间内,故该仿生关节可实现人体髋关节的各个运动姿态。
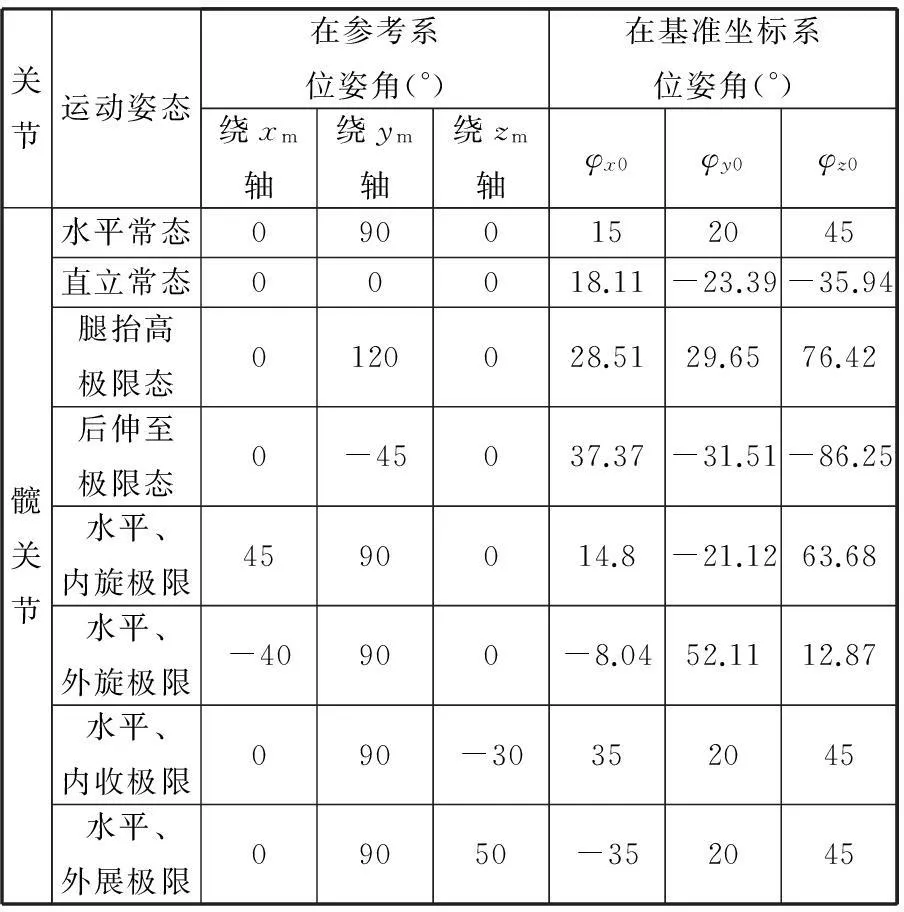
表2 关节运动特定状态及机构位姿角
4.2模拟实验
基于上述模型分析,为进一步验证安装角度和偏置角度的合理性,建立映射关系和正反解的正确性,及该仿生关节复现人体运动的能力,设计并进行了模拟实验。具体模拟实验的过程如下:如图10所示,使用可穿戴式完全无线3D身体惯性跟踪仪及磁性运动跟踪器,采集人体髋关节在外伸、内收、前摆和后摆这些髋关节实际运动状态下的位姿信息。依照前文获得的数学映射关系、偏置角度t和安装定位角度,将传感器采集到的信息数据(图11)在MATLAB下进行整合处理,实现信息由人体关节空间到该机构空间的变换,再利用求解的正反解关系,可获得模型驱动的角速度随时间变化的关系,图12是其中一个驱动关节的角度、角速度随时间变化的关系。

图10 仪器坐标及穿戴方式

图11 采集的大腿绕x轴转角变化
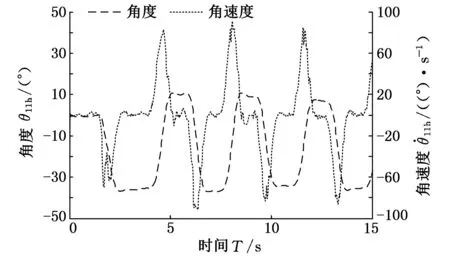
图12 经转换后获取的驱动输入
将运算得到的关节驱动信息,作为已建立模型的驱动输入,导入到ADAMS模型中,进而校验模型偏置端的运动姿态与实际人体关节姿态的关联性。由于篇幅限制,本文只将髋关节屈伸运动(前后摆腿运动)的模拟结果予以展示,图13为ADAMS中测绘到的仿生髋关节偏置端绕x轴转角变化曲线。

图13 ADAMS中仿生髋关节偏置端绕x轴转角变化
从实验结果易于看出,在人体大腿往复进行4次前后摆动的过程中(图13),人体大腿部分绕x轴的转动角度变化约在-15°~58°,忽略步伐间的误差,4次中彼此运动变化规律相仿,该运动近似呈周期性,符合人体实际运动规律。ADAMS仿真模型的偏置端角度(偏置端轴线与竖直垂线夹角)变化为-14.76°~56.38°,结合图11、图12和图14,仪器测得的偏置端绕人体x轴的角度随时间的变化关系与仿真结果相仿,误差在10-5(°)(图15),该仿生髋关节基本上复现人体前后摆腿过程。
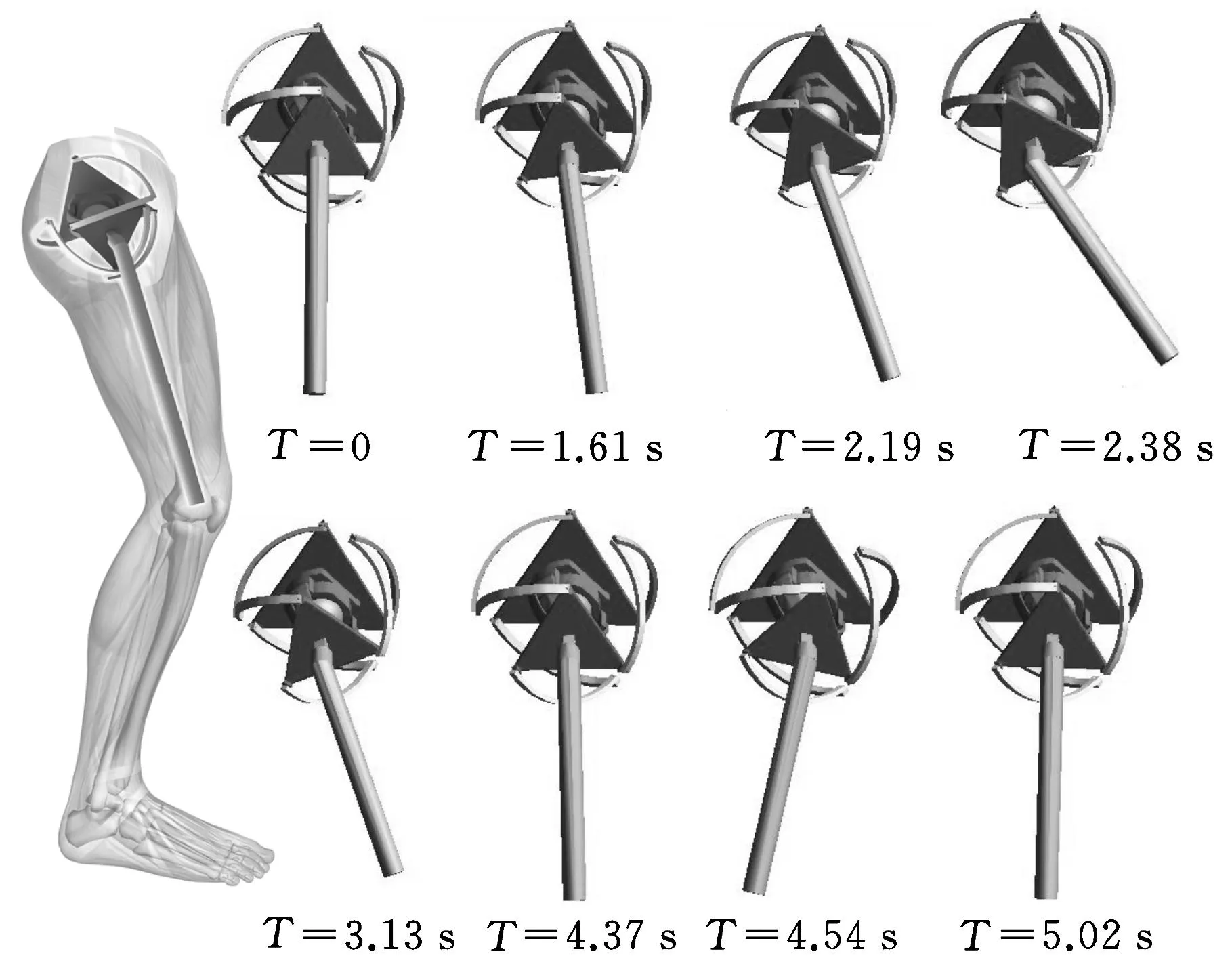
图14 ADAMS模型动作效果
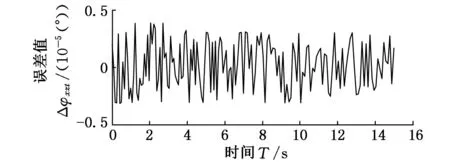
图15 ADAMS模型仿真结果与仪器测量值的误差
忽略具体人体与所建模型存在的差异性,该仿生髋关节的运动输出和实际人体关节运动相仿,故本文所建立偏置输出3-RRR+(S-P)球面并联仿生髋关节的机构空间和人体关节空间映射关系和正反解运算是可以应用到实际仿生关节控制和信息处理的算法中的,同时也说明了本文建立的偏置角度和安装定位角度的合理性。
5结论
(1)仿生关节空间可覆盖髋关节的运动空间。提出基于3-RRR+(S-P)机构的关节机构工作空间与人体髋关节运动空间相协调的设计原则,进而确定关节机构的安装定位角度,完成人形机器人髋关节的设计。
(2)从仿生学角度建立了该机构的工作空间与人体关节的运动空间的映射关系,并给出了仿生髋关节运动学正反解的解析表达式。
(3)设计并进行数值验证和模拟实验,该仿生关节可实现髋关节的8个基本运动姿态并对髋关节屈伸运动进行模拟复现,进一步证实了上述理论计算的正确性,展示了研究该仿生关节的实际价值,可为后序进行仿生髋关节样机的研制、关节在人形机器人身上嫁接及安装定位提供理论基础和设计依据。
参考文献:
[1]侯雨雷, 胡鑫喆, 周玉林. 新型过约束球面并联式关节机构仿生设计[J]. 中国机械工程, 2014, 25(6): 723-726.
HouYulei,HuXinzhe,ZhouYulin.BionicJointDesignBasedonaNovelOver-constrainedSphericalParallelMechanism[J].ChinaMechanicalEngineering, 2014, 25(6): 723-726.
[2]GosselinCM,St-PierreE.DevelopmentandExperimentationofaFast3-DOFCamera-orientingDevice[J].TheInternationalJournalofRoboticsResearch, 1997, 16(5): 619-630.
[3]GoseelinCM,St-PierreE,MartinG.DevelopmentoftheAgileEye[J].Robotics&AutomationMagazine, 1996, 3(4): 29.
[4]TaoZJ,AnQ.InterferenceAnalysisandWorkspaceOptimizationof3-RRRSphericalParallelMechanism[J].MechanismandMachineTheory, 2013, 69: 62-72.
[5]杨加伦, 高峰, 戚开诚. 等.正交三自山度球而并联机构的位置正反解新方法[J].机械设计与研究, 2009, 24(3): 30-32.
YangJialun,GaoFeng,QiKaicheng,etal.LocationOrthogonalThreeGoalsfromSantosandParallelMechanismForwardandInverseNewApproach[J].MechanicalDesignandResearch, 2009, 24(3): 30-32.
[6]SaafiH,LaribiMA,ZeghloulS.ForwardKinematicModelImprovementofaSphericalParallelManipulatorUsinganExtraSensor[J].Mechanism&MachineTheory, 2015, 91:102-119.
[7]黄田, 曾宪著, 曾子亚, 等.等顶锥角3自由度球面并联机构的全参数解析尺度综合[J].机械工程学报, 2000, 36(8): 15-19.
HuangTian,ZengXianzhu,ZengZiya,etal.SotheWholeArgumentParsingWhiteScalesTipAngle3DegreesofSphericalParallelSynthesis[J].JournalofMechanicalEngineering, 2000, 36(8): 15-19.
[8]高征, 高峰.球面3自由度并联机构的正解分析新方法[J]. 机械设计与制造, 2006(9):122-124.
GaoZheng,GaoFeng.TheForwardNewApproachof3DOFSphericalParallelMechanism[J].MechanicalDesignandManufacture, 2006(9):122-124.
[9]张立杰, 刘辛军. 球面三自由度并联机器人可达工作空间的研究[J].中国机械工程,2001,12(10):1122-1124.
ZhangLijie,LiuXinjun.TheReachableWorkspaceofa3DOFSphericalParallel[J].ChinaMechanicalEngineering, 2001,12(10):1122-1124.
[10]赖一楠, 张广玉, 段志鸣, 等.面向控制的3-RRR球面并联机构正运动学实时解法[J]. 中国机械工程, 2003,14(2):113-115.
LaiYinan,ZhangGuangyu,DuanZhiming,etal. 3-RRRSphericalParallelMechanismforReal-timeControloftheForwardKinematicsSolution[J].ChineseMechanicalEngineering, 2003,14(2):113-115.[11]BaiS,HansenMR,AngelesJ.ARobustForward-displacementAnalysisofSphericalParallelRobots[J].Mechanism&MachineTheory, 2003, 37(2):185-204.[12]EnferadiJ,TootooncbiAA.ANovelSphericalParallelManipulatorForwardPositionProblem,SingularityAnalysisandIsotropyDesign[J].Robotica, 2009,27(5): 663-676.
[13]OkadaM,ShinoharaT,GotohT,etal.DoubleSphericalJointandBacklashClutchforLowerLimbsofHumanoids[C]//IEEEInternationalConferenceonRobotics&Automation.Taipei,2003:491-496.
[14]ChengGang,YuanXin,YuJingli,etal.KinematicCalibrationAnalysisof3SPS+1PSBionicParallelTestPlatformforHipJointSimulator[J].Measurement, 2013, 46(10):4152-4160.
[15]程刚, 于敬利, 袁欣,等. 3SPS+1PS髋关节并联仿生试验系统工作空间优化[J].机械工程学报, 2013, 49(23): 88-94.
ChengGang,YuJingli,YuanXin,etal.StudyonWorkspaceOptimizationof3SPS+1PSParallelHipJointSimulator[J].JournalofMechanicalEngineering, 2013, 49(23): 88-94.
[16]周玉林,高峰. 具有偏置输出的3自由度球面并联人形机器人仿生髋关节:中国,CN101301756[P]. 2008-11-12.
[17]邱雪松,杨龙,周玉林,等.新型大工作空间仿生被动球面铰链构型及工作空间分析[J]. 中国机械工程, 2015,26(3):354-359.
QiuXuesong,YangLong,ZhouYulin,etal.ConfigurationandWorkspaceAnalysisofNovelBionicPassiveSphericalHingewithLargeWorkspace[J].ChineseMechanicalEngineering, 2015,26(3):354-359.
[18]FrankelVH,NordinM. 股骨系统基本生物理力学[M]. 黄庆森,单文文,译. 天津: 天津科学技术出版社,1986.
(编辑王艳丽)
Bionic Hip Joints Based on Bias Output 3-RRR+(S-P) Spherical Parallel Mechanisms
Yang YajingSun TongshuaiZhou Yulin
Yanshan University,Qinhuangdao,Hebei,066004
Abstract:Based on the 3-RRR+(S-P) spherical parallel hip joints with bias output, according to the bionic principles and referring to the structure of the femur, this paper determined the offset angle of the joint mechanisms, presented the coordination of the working spaces of the hip joints and the mechanisms, and ascertained the installing and locating angle of the joints on human body, which completed the design of the new humanoid robot hip joints. The paper made the mapping relationship between the spaces of the bionic joints and the mechanisms and solved the inverse/forward kinematics of the bionic joints.The numerical calculation shows that the joint mechanism may realize the basic movements of human hips, as well as the wireless wearable 3D inertia tracking equipment and magnetic movement tracking equipment from Xsens Technology Co. for the human natural gait. After mapping transforms and inverse solving,the information was imported into ADAMS for test. The results, which also verify the practicability and scientific values of the joints, support the mapping installing characterized angle and inverse/forward solutions proposed.
Key words:bias output; bionics;hip sphericity; parallel mechanism
收稿日期:2015-07-21
基金项目:国家自然科学基金资助项目(51275443)
中图分类号:TP24
DOI:10.3969/j.issn.1004-132X.2016.11.001
作者简介:杨亚敬,女,1989年生。燕山大学机械工程学院硕士研究生。主要研究方向为人形机器人及仿生学。孙通帅,男,1991年生。燕山大学机械工程学院硕士研究生。周玉林(通信作者),男,1961年生。燕山大学机械工程学院教授、博士研究生导师。
猜你喜欢
科技传播(2019年22期)2020-01-14
东方教育(2017年24期)2018-01-11
科技视界(2017年18期)2017-11-16
中国科技纵横(2017年5期)2017-05-12
科技创新与应用(2017年11期)2017-04-27
文艺生活·下旬刊(2017年2期)2017-03-18
小学阅读指南·低年级版(2016年11期)2017-02-06
少儿科学周刊·少年版(2015年11期)2015-12-17
小学科学(2015年9期)2015-09-28
大众文艺(2015年2期)2015-07-12
