
任意阵面射频仿真辐射源位置模拟控制方法
2016-07-09 14:27甘连仓肖本龙刘鹏军
现代电子技术 2016年7期
甘连仓 肖本龙 刘鹏军
摘 要: 介绍传统的射频仿真球面阵三元组控制原理、过程,在此基础上提出一种新的任意阵面的射频仿真辐射源模拟控制方法,给出了通过任意三元组模拟合成一个辐射源的幅度位置控制公式,研究任意阵面模拟控制流程,为射频仿真试验提供了一种新的目标模拟手段。
关键词: 射频仿真; 模拟控制方法; 任意阵面; 幅度控制
中图分类号: TN820.1?34 文献标识码: A 文章编号: 1004?373X(2016)07?0036?03
Abstract: The triple control principle and process of the traditional RF simulation spherical array are introduced. On this basis, a new simulation control method of RF simulation radiation?source position for arbitrary shaped antenna array is proposed. The amplitude and position control formula of the radiation source synthetized by arbitrary triple simulation is given. The simulation control process of the arbitrary shaped antenna array is researched to provide a new target simulation method for RF simulation test.
Keywords: RF simulation; simulation control method; arbitrary shaped antenna array; amplitude control
0 引 言
天线阵列与馈电控制分系统是射频仿真试验系统的重要组成部分,主要承担雷达目标信号、雷达信号、干扰信号等射频信号的辐射任务;其通过接收战情控制信息,模拟各种电磁信号在空间的分布及运动,并控制电磁信号的传播时间延迟及幅度的大小变化。传统天线阵列形状一般为球面,其上安装的天线馈元电轴指向球面天线阵球心。试验时,被试装备的天线相位中心要求与该球心重合,从而保证射频辐射源信号位置的模拟精度,以准确控制信号功率的幅度。当射频仿真系统需要承担多种装备的试验任务时,把每个被试装备天线相位中心调整到与阵列天线球心重合往往难以实现,相当于降低了系统精度指标,大多数情况下精度下降的幅度是不能容忍的,必须采取一定的技术措施。
本文设想的辐射源位置控制方法可用于任意形状的天线阵列,阵面上馈元的位置不需要规律排列。球面阵由于容易保证阵面上任意位置相邻的三馈元为等边三角形,因而控制方法更加简单,这在控制硬件计算速度不高的年代毫无疑问具有更大的优势,也是球面阵大行其道的主要原因。当控制硬件的计算速度不成问题,馈元的位置精测也变方便后,降低天线阵的设计要求,对于降低系统制造成本,灵活系统功能配置将更加有利。譬如可以用平面天线阵取代球面天线阵以降低加工制造的难度,也可以降低六自由夹具的精度要求等。另一方面,试验时对于被试装备三维位置的要求也降低了,可以更加方便试验操作,通过改进辐射源幅度位置模拟控制方法,不必调整被试装备位置,只要测量出天线旋转中心的坐标即可精确控制辐射源幅度和位置,从而扩展系统的应用范围。
1 球面阵辐射源幅度位置控制方法
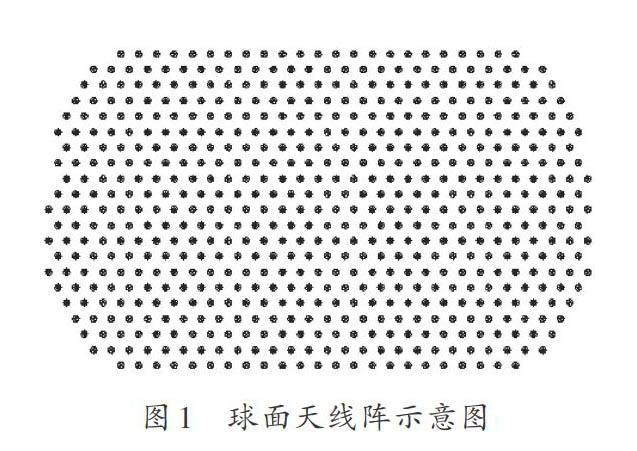
如图1所示,球面天线阵使用三元组工作方式模拟辐射源信号,任意相邻的三个天线馈元都可组成一个三元组,通过控制每个天线馈元的输出功率、信号相位以改变合成信号的相位中心点的位置,从而模拟信号在三角形区域内的运动。通过切换信号在不同三元组天线输出,完成信号在整个天线阵列区域连续运动的模拟。
1.1 三元组工作原理
球面天线阵列采用三元组天线合成辐射的方式,通过等效辐射中心的移动模拟射频信号的空间角度特性。
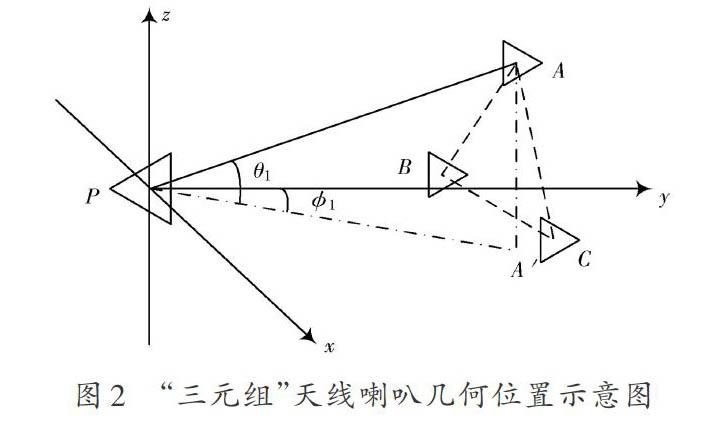
如图2所示,[A,B,C]为三元组天线,[P]为接收天线,三元组天线的俯仰角分别为[θ1,][θ2,][θ3,]方位角分别为[?1,][?2,][?3,]图中以[A]天线为例标出了俯仰角和方位角,[A]为在[xPy]面上的投影,其他天线同理。
相邻的三个天线都形成一个三元组,模拟的目标在天线阵列运动时,首先要确定目标所在三元组号,确定三元组的朝向和原点类别,计算目标在三元组内的归一化坐标,再利用幅度重心公式计算三元组各天线辐射能量,完成目标的运动控制。对应在阵列控制中分为“粗位控制”(简称粗控)与“精位控制”(简称精控)两部分。
1.2 三元组天线的粗控方法
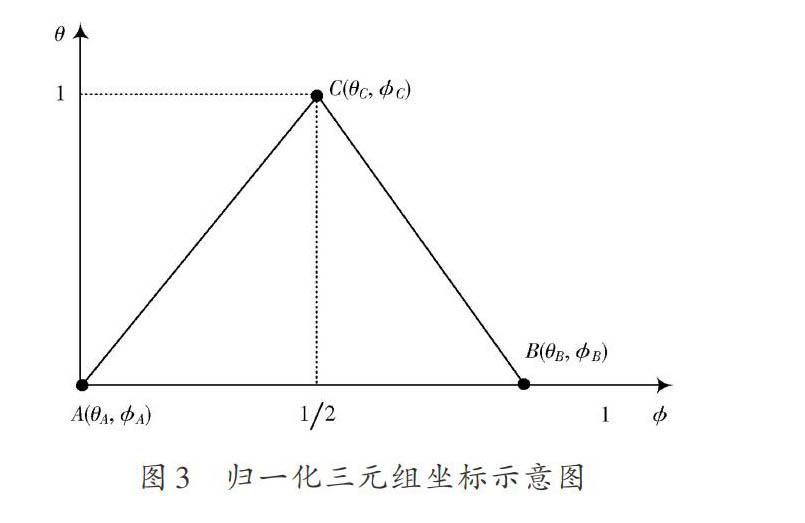
目标在三元组坐标系内的坐标是按直角坐标系给出的。该坐标系的定义已经在三元组天线归一化处理中给出,坐标原点在三元组的“原点”上。仿真试验系统中的[?]和[θ]的坐标是相对于目标阵列球面的球心所呈现的张角,因此需要将其转换到幅度重心公式中的[(?0,θ0)]归一化坐标。
目标位置的粗控方法主要有波音算法、三角形直接定位法、交点直接定位法和小样快速定位法等。交点定位法是目前常用的方法,其基本思想是:将天线阵列中的每一个天线元看成是两条直线的交点,而不是看成三角形的三个顶点。由[(?,θ)]直接判别出所涉及的直线,再由交点得出天线元的序号。
1.3 三元组天线的精控方法
精控主要根据粗位控制算法所提供的[(?0,θ0)]计算三元组天线能量大小,产生阵列馈电控制系统的程控衰减器和移相器的控制字。为了达到上述要求,精位控制算法主要完成以下几项任务:近场效应误差修正;计算三元组辐射信号的振幅;路径长度/损耗修正。
2 任意阵辐射源幅度位置控制方法
任意阵仍采用“三元组”控制法,模拟控制需要的条件:天线阵馈元的空间坐标位置已知,馈元在一定角度范围内的三维方向图数据已知,被试装备天线相位中心的坐标已知,天线阵相对某参考点完成了标校。
阵列粗控方法与球面阵相似,这里仅介绍精控方法。
2.1 相位幅度配平
天线阵相对参考点完成标校,说明各馈电支路经过移相器修正后,到达参考点的电长度相等。当被试装备天线相位中心位于参考点外的其他点位[P]时,各馈电支路即使经过移相器修正后,到达[P]点的电长度也不再相等。不再相等的原因是,各馈元到被试天线的距离发生了变化。这样,整个阵面的相位平衡被打破,必须修改修正值表格。
2.2 幅度控制
当天线阵是非球面阵,或为球面阵但被试装备天线相位中心不在球心时,三元组不再为等边三角形,可以推出三元组为任意三角形时的幅度控制公式如下,任意三元组坐标示意图见图4。
2.3 控制流程
综上所述,任意阵用三元组馈元模拟一个辐射源的基本控制流程如下:
(1) 首先在参考点对任意阵进行标校,得出在参考点处的馈电通道的幅相平衡修正表格。
(2) 被试装备定位后,测出天线相位中心或天线旋转中心的空间坐标值,计算出在此位置的馈电通道的幅相平衡修正表格并装入控制计算机。
(3) 进行近场效应值修正测量或计算,也作为幅相修正表格装入控制计算机。
(4) 根据辐射源在空间的坐标位置,计算所在的三元组号。
(5) 利用任意形状三元组幅度控制公式,结合新装入的馈电通道幅相平衡修正表格对通道中的数控衰减器和数控移相器进行控制。
3 新方法的优缺点分析
新控制方法的优势:馈元的位置不需要精确的机械标定和调整,可省去复杂的六自由度夹具;被试装备的位置不需要精确控制和调整,不需要建造复杂的三维可调整的平台系统。仅需要全站经纬仪对天线相位中心进行精确测量。
新控制方法的不足:控制方法复杂,对控制计算机的计算速度有更高的要求;被试装备未处于整阵面所有馈元的最大辐射方向上,可能对系统的动态范围会有不利的影响。
4 结 论
该控制方法不仅适用于任意阵列,对于球面阵列,当被试装备天线相位中心难以调整到球面天线阵的球心时,也不失为一个减小试验误差的好的试验方法。尤其是偏移球面距离不大时,控制方法可以更简单。
参考文献
[1] 毛继志,郭陈江,张麟兮,等.幅相误差对射频仿真系统目标位置精度的影响[J].系统仿真学报,2003,15(8):1149?1151.
[2] 张安民,崔连虎,徐海.射频仿真系统目标模拟能力拓展方法研究[J].弹箭与制导学报,2010,30(5):189?192.
[3] 王炬,卫颖,刘焱,等.战场电磁环境效应模拟技术研究[J].电子测量技术,2012(9):15?17.
[4] 赵军仓,樊红社,李萍,等.射频仿真系统中目标的研究[J].陕西理工学院学报,2006,22(2):19?22.
[5] 蔡磊,戴格林,陆廷金.射频仿真目标模拟系统误差分析及补偿[J].计算机工程与设计,2007,28(15):3672?3674.
[6] 陈训达.射频仿真中的双近场效应[J].系统仿真学报,2001,13(1):92?95.
[7] 郝晓军,陈永光,何建国,等.三元组天线阵列控制方案研究[J].信号处理,2008,24(8):700?704.
[8] 赵泉,孔令峰.射频仿真系统中天线阵列在空间位置和布局设计[J].舰船电子工程,2014,34(7):99?101.
[9] 李萍,韦高,张麟兮,等.射频仿真系统目标精度改进校准方法[J].计算机仿真,2006,23(4):314?316.
[10] 王蒙,臧春华.一种提高射频仿真系统目标定位精度的校准算法[J].仪器仪表用户,2011,18(1):69?71.
