
带终端角度约束的飞行器三维制导控制一体化设计
2016-08-09 18:54刘晓东黄万伟王丹晔杜立夫
航天控制 2016年2期
刘晓东 黄万伟 王丹晔 杜立夫
北京航天自动控制研究所, 北京 100854
带终端角度约束的飞行器三维制导控制一体化设计
刘晓东 黄万伟 王丹晔 杜立夫
北京航天自动控制研究所, 北京 100854

针对带终端角度约束的STT飞行器,提出一种三维制导控制一体化设计方法。首先,推导出面向三维制导控制一体化设计的非线性数学模型。然后,针对一类多变量非线性系统,构造了一种鲁棒动态逆设计方法。结合鲁棒动态逆和反演设计方法,完成了制导控制一体化算法的初步设计。最后,针对传统反演法带来的“计算膨胀”问题以及非线性补偿项引发的控制量抖动问题,对已完成的初步算法做进一步改进。仿真结果表明,所提出的三维制导控制一体化算法可确保飞行器的稳定飞行与精确制导,满足终端角度的约束要求,并且具备针对参数不确定性的强鲁棒性。 关键词 制导控制一体化;三维制导;动态逆控制;动态面控制;反演法
随着现代科技与军事技术的进步,精确制导的需求与日俱增,末制导技术被广泛应用于需要拦截或精确打击目标的领域[1],包括防空导弹、反舰导弹、弹道导弹、攻击型无人机和高超声速飞行器等,如何进一步提高末制导阶段制导控制系统的综合性能成为亟需解决的重要问题。飞行器制导控制系统的传统设计方法都是基于频谱分离的思想,将制导回路和控制回路分开设计。尽管这种传统分离设计方法在过去被证明是有效的,但它并不总能协调好各子系统之间的关系,会导致制导与控制之间缺乏有机的协调匹配性,不能充分发挥飞行器的最大潜力。
制导控制一体化的初步设计理念是由Williams等人[2]于1983年提出的,其宗旨是将制导分系统与控制分系统视为一个整体系统,然后直接针对这个整体系统进行制导控制律的设计。此方法可以在很大程度上提高制导分系统与控制分系统的协调匹配程度,并且改善飞行器的飞行品质。在之后的30多年,经过国内外学者的不懈努力,飞行器制导控制一体化技术已经取得了一定的研究成果。文献[3-5]针对纵向平面内的制导控制一体化问题进行了相关的研究,相比传统的分离设计方法,所研究的一体化方案可使飞行器在纵向平面内具有更好的性能。然而,实际上飞行器通道运动之间存在耦合关系,仅靠单平面的制导控制一体化技术并不能有效地解决这一问题。于是,一些学者便开始关注三维制导控制一体化设计方法的研究,以同时提高飞行器三通道运动之间的协调匹配性。以自寻的导弹为研究对象,文献[6]在模型精确已知的前提下,设计了一种基于反馈线性化的三维制导控制一体化算法。文献[7]给出了一种基于微分几何和特征结构配置的一体化设计方法,以保证导弹能够垂直命中目标。文献[8]通过求解一个依赖于状态的Riccati方程得到三维制导控制一体化的最优设计。然而,如上的三维制导控制一体化设计方法均以模型精确已知为前提,并且借助于复杂的计算过程。为了进一步研究鲁棒性更高、实用性更强的三维一体化设计方案,文献[9-10]将STT飞行器的制导控制设计模型写为分块级联的形式,然后针对每一个子系统,分别设计具有鲁棒性能的控制律,最后利用反演或动态面控制方法完成子系统间的关联,但研究中没有涉及终端角度的控制问题。
相比传统反演法,动态面控制方法通过引入若干组低通滤波器避免了对虚拟指令的直接微分,从而有效克服了前者带来的“计算膨胀”问题[11]。基于此,本文将从动态面分块设计的角度出发,并考虑终端角度的约束要求,构造一种具有强鲁棒性能的三维制导控制一体化设计方法。
1 数学建模
假设飞行器在末制导阶段的速度变化范围不大,设计过程中可将该变化视为系统不确定性。根据惯性坐标系、视线坐标系以及弹道坐标系之间的转化关系,可得到视线坐标系内飞行器—目标点的三维相对运动方程组[12]:
(1)
关于文中各变量的具体定义可参考文献[12]。
根据飞行器末段飞行环境的特点,可建立弹道坐标系下飞行器质心运动的动力学方程:
(2)
根据式(1)~(2),可进一步得到视线高低角速度和视线方位角速度的微分方程组:
(3)
式中,fn=cosθcosq1+sinθsinq1cos(q2-φc),Δq1和Δq2表示系统不确定性。模型式(3)避免了文献[9]中视线坐标系与速度坐标系近似重合的假设条件,从一定程度上提高了本文方法的通用性。
对于STT飞行器对象,其无动力飞行的姿态运动方程组可以表述为:
(4)
式中,飞行器的气动力和气动力矩均是关于飞行状态的非线性函数。由式(1)~(4)构成的非线性系统阶数较高,结构较复杂,不宜直接应用于后续的设计,因此要将其进行简化处理,使之有利于制导控制一体化算法的设计。
首先,对于STT飞行器,可通过姿态控制实现速度倾侧角γc≈0,于是式(3)可以改写为:
(5)
其次,为了便于制导控制一体化算法的设计,将气动力Y和侧向力Z表示为如下的简化形式:
(6)
式中,Yd和Zd表示气动力建模误差。同理,将气动力矩Mx1,My1和Mz1拟合为如下的复合形式:
(7)
由式(4)~(7),将三维制导控制一体化设计模型表示为具有严格反馈形式的状态空间表达式:
(8)




2 三维制导控制一体化算法设计
2.1 鲁棒动态逆设计
对于多变量非线性系统:

(9)
式中,G(x)是非奇异矩阵,若设计如下的非线性动态逆控制律:

W是正定矩阵
(10)
则可保证系统式(9)的实际状态向量x趋近于期望状态向量xd。
但是,当考虑非线性系统中的不确定性因素时,即考虑如下的非线性系统:

(11)
若仍采用动态逆控制律式(10),非线性系统的跟踪性能会受到不确定性因素的影响,即传统的动态逆控制具有鲁棒性不强的缺点,因此还需要对其作进一步的改进。

(12)
当满足κ>Δ时,可实现非线性系统式(11)的鲁棒状态跟踪。
利用Lyapunov稳定性分析方法容易证明定理1,具体过程在此不再给出。
2.2 基于鲁棒动态逆的反演一体化算法
针对一体化设计模型式(8),可以设计基于鲁棒动态逆的反演一体化算法如下:
(13)
式中,C,W0,W1和W2均为正定对角阵,κ0,κ1和κ2均为正数。
2.3 基于鲁棒动态逆的动态面一体化算法
为了避免传统反演方法中连续微分带来的“计算膨胀”问题,可以进一步引入动态面控制方法。于是,下面给出基于鲁棒动态逆的动态面一体化算法:
(14)
式中,正定对角阵η1和η2为滤波器系数矩阵。
因为控制律式(14)中含有非线性项df(si) (i=0,1,2),故容易引发控制量的高频抖动现象。为了克服此问题,并保证方法简单易行,可将非线性函数用如下的连续函数替代:
(15)
可以证明,相比制导控制一体化初步算法式(13),采用制导控制一体化改进算法式(14)~(15)时,在满足相同的条件下,制导控制系统的Lyapunov渐近稳定性将退变为Lyapunov有界稳定性。
3 仿真结果
仿真中,STT飞行器对象采用文献[9]提供的数学模型。而且,本文制导控制一体化算法的参数选取如下:
W0=diag{10,10},C=diag{5,6},
W1=diag{60,60,60},W2=diag{100,100,100},
η1=diag{0.002,0.002},
η2=diag{0.002,0.002,0.002},
κ0=3,κ1=κ2=20,σ0=σ1=σ2=0.1
同时,考虑到实际工程情况,将各舵偏角限制在±35°之间。
仿真中考虑标称和上、下限偏差组合情况,即参数不确定性系数Np分别为0,1和-1三种仿真情况,下面给出飞行器-目标相对距离R、弹道倾角θ、弹道偏角φc以及速度倾侧角γc曲线。
根据图1~ 4分析可知,本文的一体化制导控制方案可以满足飞行器制导精度(包括落点、落角精度等)和控制精度(包括速度倾侧角误差等)的双重指标要求。
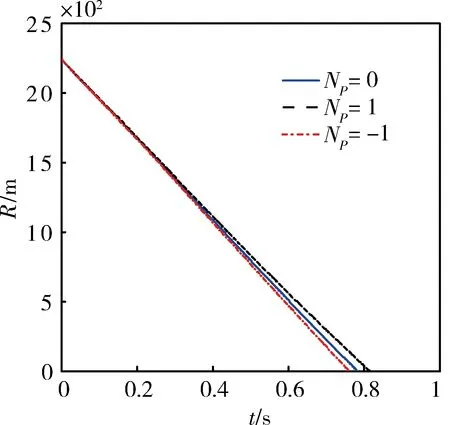
图1 飞行器-目标相对距离曲线
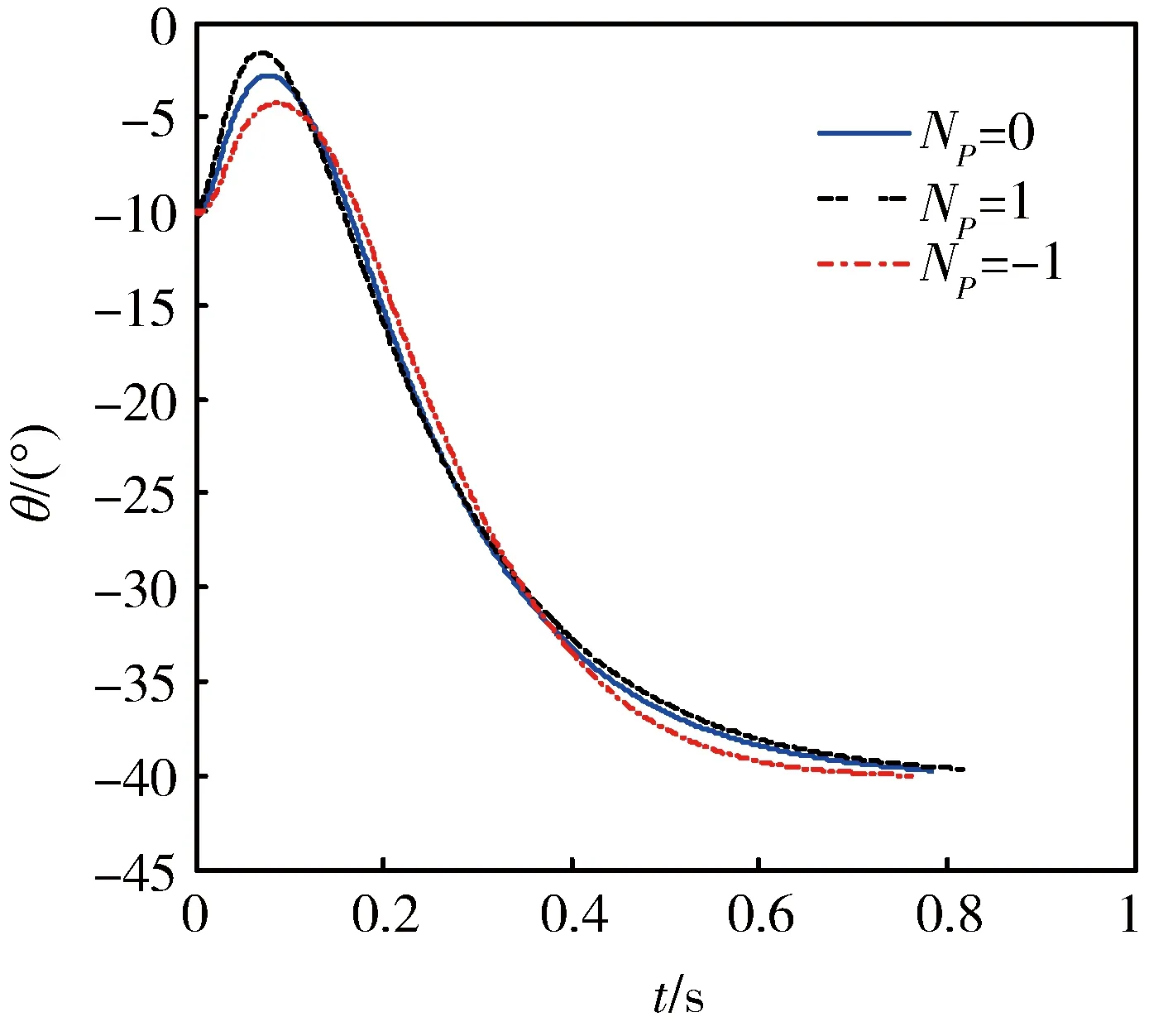
图2 弹道倾角曲线

图3 弹道偏角曲线
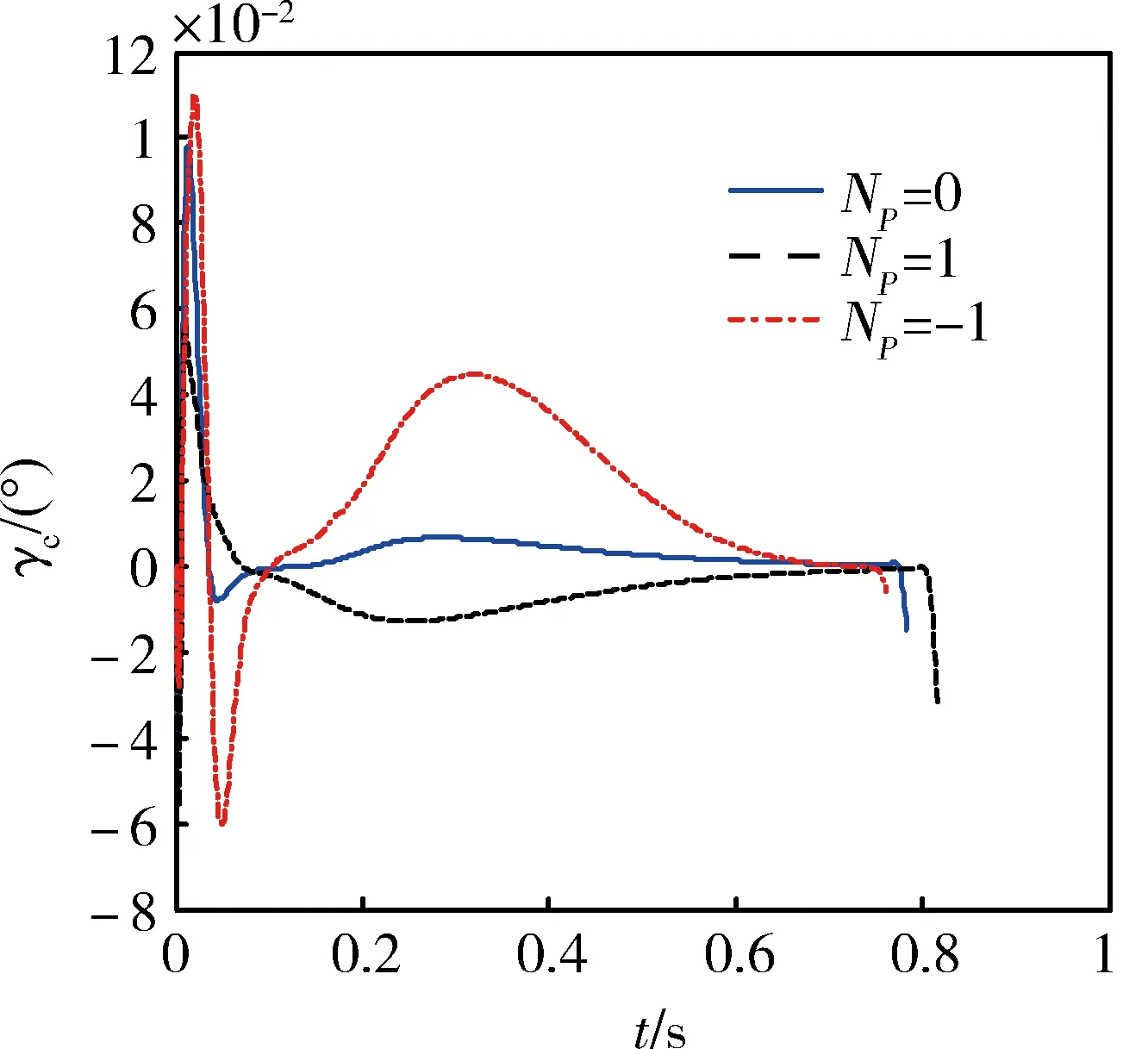
图4 速度倾侧角曲线
此外,由仿真结果可知,所研究飞行器的其它飞行状态都是稳定的,并且满足一定的过程约束要求。
4 结论
针对一类STT飞行器对象,本文介绍了一种基于鲁棒动态逆和动态面分层设计理论的三维制导控制一体化设计方法,用以提高飞行器质心运动与绕质心运动的协同匹配性。计算机仿真结果表明,本文提出的三维制导控制一体化算法可以确保飞行器在稳定飞行前提下满足终端落点和终端角度的指标要求。而且,所设计的一体化制导控制系统具备针对参数不确定因素的强鲁棒性。
[1] 姚郁,郑天宇,贺风华,等.飞行器末制导中的几个热点问题与挑战[J].航空学报, 2015, 36(8): 2696-2716.(Yao Yu, Zheng Tianyu, He Fenghua, et al. Several Hot Issues and Challenges in Terminal Guidance of Flight Vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(8): 2696-2716.)
[2] Williams D E, Richman J, Friedland B. Design of an Integrated Strapdown Guidance and Control System for A Tactical Missile[C]. AIAA Guidance and Control Conference, 1983: 57-66.
[3] Shima T, Idan M, Golan O M. Sliding-Mode Control for Integrated Missile Autopilot Guidance[J]. Journal of Gui-
dance, Control, and Dynamics, 2006, 29(2): 250-260.
[4] Hou M Z, Duan G R. Integrated Guidance and Control of Homing Missiles Against Ground Fixed Targets[J]. Chinese Journal of Aeronautics, 2008, 21(2): 162-168.
[5] Wang X H, Wang J Z. Partial Integrated Missile Guidance and Control with Finite Time Convergence[J]. Journal of Guidance, Control, and Dynamics, 2013, 36(5): 1399-1409.
[6] Menon P K, Ohlmeyer E J. Integrated Design of Agile Missile Guidance and Autopilot Systems[J].Control Engineering Practice, 2001, 9(10): 1095-1106.
[7] 尹永鑫,杨明,王子才.导弹三维制导控制一体化设计[J].电机与控制学报, 2010, 14(3): 87-91.(Yin Yongxin, Yang Ming, Wang Zicai. Three-Dimensional Guidance and Control for Missile [J]. Electric Machines and Control, 2010, 14(3): 87-91.)
[8] Palumbo N F, Reardon B E, Blauwkamp R A. Integrated Guidance and Control for Homing Missiles[J]. Johns Hopkins APL Technical Digest, 2004, 25(2):121-139.
[9] Hou M Z, Liang X L, Duan G R. Adaptive Block Dynamic Surface Control for Integrated Missile Guidance and Autopilot[J]. Chinese Journal of Aeronautics, 2013, 26(3): 741-750.
[10] 薛文超,黄朝东,黄一.飞行制导控制一体化设计方法综述[J]. 控制理论与应用, 2013, 30(12): 1510-1519.(Xue Wenchao, Huang Chaodong, Huang Yi. Design Methods for the Integrated Guidance and Control System [J]. Control Theory and Applications, 2013, 30(12): 1510-1519.)
[11] Swaroop D, Hedrick J K, Yip P P, et al. Dynamic Surface Control for a Class of Nonlinear Systems[J]. IEEE Transactions on Automatic Control, 2000, 45(10): 1893-1899.
[12] Liu X D, Xiong S F, Huang W W, et al. Mathematical Modeling Facing to Three-Dimensional Integrated Guidance and Control for STT Aircraft[C]. IEEE International Conference on Mechatronics and Control, 2014: 443-448.
Aircraft Three-Dimensional Integrated Guidance and Control Design Containing Terminal Angle Constraints
Liu Xiaodong, Huang Wanwei, Wang Danye, Du Lifu
Beijing Aerospace Automatic Control Institute, Beijing 100854, China
Aimingattheslide-to-turn(STT)aircraftconstrainedbyterminalangles,athree-dimensionalintegratedguidanceandcontrol(3D-IGC)designapproachisimplemented.Firstly,anonlinearmathematicalmodelorientedto3D-IGCdesignisdeduced.Secondly,regardingaclassofmulti-variablenonlinearsystem,arobustdynamicinversioncontrolmethodisestablished.Bycombingwithbacksteppingmethod,theinitialdesignof3D-IGClawisfinished.Finally,inordertoavoidtheproblemsof“explosionofterms”andhigh-frequencychatteringincontrolquantities,whichareresultedfromthetraditionalinversioncontrolmethodandthenonlinearcompensationtermrespectively,thefurtherimprovementontheas-built3D-IGClawisimplemented.Thesimulationresultspresentthattheproposed3D-IGClawcanguaranteethestableflightandaccurateguidanceofresearchedaircraftandalsosatisfytheconstrainedconditionsofterminalangles.Furthermore,itpossessesstrongrobustnessagainstparameteruncertainties.
Integratedguidanceandcontrol;Three-dimensionalguidance;Dynamicinversioncontrol;Dynamicsurfacecontrol;Backstepping
2015-07-06
刘晓东(1987-),男,山东潍坊人,博士,工程师,主要研究方向为飞行器制导与控制技术、伺服系统控制技术等;黄万伟(1970-),男,湖南醴陵人,博士,研究员,主要研究方向为飞行器先进控制理论与应用、导航与制导技术等;王丹晔(1984-),女,山西人,硕士,工程师,主要研究方向为飞行器制导等;杜立夫(1985-),男,辽宁人,博士研究生,主要研究方向为飞行器姿态控制等。
TJ765.2
A
1006-3242(2016)02-0003-06
