联合VLBI和天文导航的月球车定位结果分析
2016-08-16 02:00魏二虎汤深权金双根刘经南
大地测量与地球动力学 2016年8期
关键词:月球车
魏二虎 汤深权 金双根 刘经南
1 武汉大学测绘学院,武汉市珞喻路129号,430079 2 中国科学院上海天文台,上海市南丹路80号,200030 3 武汉大学GNSS研究中心,武汉市珞喻路129号,430079
联合VLBI和天文导航的月球车定位结果分析
魏二虎1汤深权1金双根2刘经南3
1武汉大学测绘学院,武汉市珞喻路129号,4300792中国科学院上海天文台,上海市南丹路80号,2000303武汉大学GNSS研究中心,武汉市珞喻路129号,430079
摘要:推导了联合甚长基线干涉测量(VLBI)和天文导航的月球车定位计算公式,并利用嫦娥三号(CE-3)实测数据分别解算VLBI单独定位和联合天文导航定位的月球车定位结果。结果表明,联合定位相对于单独VLBI定位,提高了天文导航的定位精度,改善了月球车的定位精度;同时,联合VLBI和天文导航定位也保障了月球车定位的可靠性与稳定性。
关键词:VLBI; 天文导航; 联合定位; 深空探测; 月球车
月球车要提高自身生存能力以及顺利开展科学探测任务,关键是获取自身的位置信息[1]。对于月球车定位方法,国内外学者提出了同波束VLBI定位、天文导航、惯性导航(包括航位推算)、视觉导航等方法[2-3]。甚长基线干涉测量(VLBI)技术具备高精度、高分辨率等特点,在我国“嫦娥工程”的月球探测器实时精密定轨、定位中发挥了重要作用[4]。天文导航具有稳定性高、自主性强等特点,广泛应用于船体、卫星及军事武器设备的导航中[5]。VLBI定位技术可以提供高精度的位置信息,但由于受一些外部因素的影响,VLBI信号可能无法接收,导致其不能正常工作,月球车定位的稳定性和可靠性会因此受到影响。天文导航方法不受时间、距离长短的影响,能够提供姿态和位置信息,但其短时定位精度较VLBI低。本文提出联合VLBI和天文导航的月球车定位方法并推导了联合定位公式,对今后天文导航用于月球车定位,提高月球车定位的稳定性和可靠性具有实际意义。
1 嫦娥三号(CE-3)月球车定位模型
1.1VLBI定位模型
A、B表示地面上2个VLBI测站点。设月球车信号到达A、B测站的时间分别为t1、t2,月球车与测站之间的距离分别为r1、r2,则:
(1)
式中,c表示光速,τ12表示信号到达测站A、B的时间差,(x1,y1,z1)为测站A的坐标,(x2,y2,z2)为测站B的坐标,(xs,ys,zs)为月球车的坐标。对式(1)进行线性化,按泰勒级数展开,舍去二次幂以上项,可得误差方程:
cτo-c+a11dxs+a12dys+a13dzs=
a11dxs+a12dys+a13dzs
(2)
式中,dxs、dys、dzs为月球车坐标改正数,τo为时延观测值,τc为理论几何时延值,τo-c为时延观测值与理论值之间的差值,(xs0,ys0,zs0)为t0时刻月球车的坐标初始值。 目前,中国有4个VLBI测控站,可以组成6条观测基线,建立如下误差方程:
(3)
仅使用VLBI得到的时延信息来转换成角位置信息时,会有较大的误差。因此,在实际解算月球车位置时,往往需要加入月球车的距离约束条件。可建立如下月球车距离条件限制方程:
(4)
对式(4)进行线性化并代入初始值,得:
(5)
联合式(3)和式(5),得到VLBI解算的误差模型:
(6)
1.2天文导航定位模型
(7)
式中,H、A分别是目标天体在月球车所在水平坐标系中的高度角和方位角,α、δ分别为目标天体的赤经、赤纬,GHA为春分点的格林尼治时角。为方便计算,本文将sinH、tanA当作“虚拟观测值”,并对上述观测方程进行线性化,得:
(8)
式中,(sinH)0、(tanA)0是观测值的近似值;其他系数如下:
(9)
式中,LHA为目标天体的地方时角。本文选取太阳和地球为目标观测星体,其中HE、AE表示地球对应的高度角和方位角,HS、AS表示太阳对应的高度角和方位角。可以建立如下误差方程:
(10)
观测值模拟的具体流程如下:
1)通过JPL星历(本文采用DE423)获取目标天体相对于月球的三维坐标,通过坐标转换,转换成观测星体的赤纬、赤经;
2)将通过VLBI解算的月球车月固直角坐标通过坐标转换,转换成月固系下的赤经、赤纬;
3)将步骤1)、2)得到的值代入式(8),模拟出天文导航的观测值;
4)加入观测误差,如星敏感器误差、星历误差等。
1.3联合定位模型
采用两种系统进行月球车定位,可以增强系统的稳定性,并使其容错性得到提升。由于月心直角坐标和月心大地坐标存在如下函数关系:
(11)
式中,N表示卯酉圈半径:
a为椭球长半轴,e为椭球第一离心率。由于月球车活动范围地势较为平坦,故本文假设月面高程不变,采用固定值-2.64 km(由NASA、LRO图像处理得到),求解月球车的月固坐标(xs,ys,zs)及(λ,φ)。先对式(11)求全微分,设B2矩阵为:
B2=

(12)
将式(12)代入式(6),对应的误差方程为:
(13)
则可得VLBI联合天文导航的误差方程:
(14)
设VLBI和CNS解算时的权矩阵分别为PVLBI、PCNS。由于给定的初始权矩阵不合理,故本文采用赫尔默特方差估计法进行随机模型的验后估计[6]。先给定各类观测值的初始权值,再进行迭代平差,直到各类单位权方差之比等于1为止。然后,迭代解算得到PVLBI、PCNS。最后采用最小二乘法解算出参数λ、φ,代入式(11),得到月球车的月固坐标。
2 实例解算分析
本文以嫦娥三号(CE-3)实测数据为例,采用北京(BJ)、昆明(KM)、乌鲁木齐(UR)和上海(TM)4个测站2013-12-20 19:41:57.439 125~20:48:32.439 156的观测数据,来进行月球车位置的解算,并模拟天文导航观测值。在模拟天文导航观测值的过程中,分别取太阳敏感器测量精度为6″,地球敏感器测量精度为36″,采样间隔为5s(同VLBI采样间隔一致)[7-9],得到的“虚拟观测值”残差如图1(EA表示高度角,AZ表示方位角)。
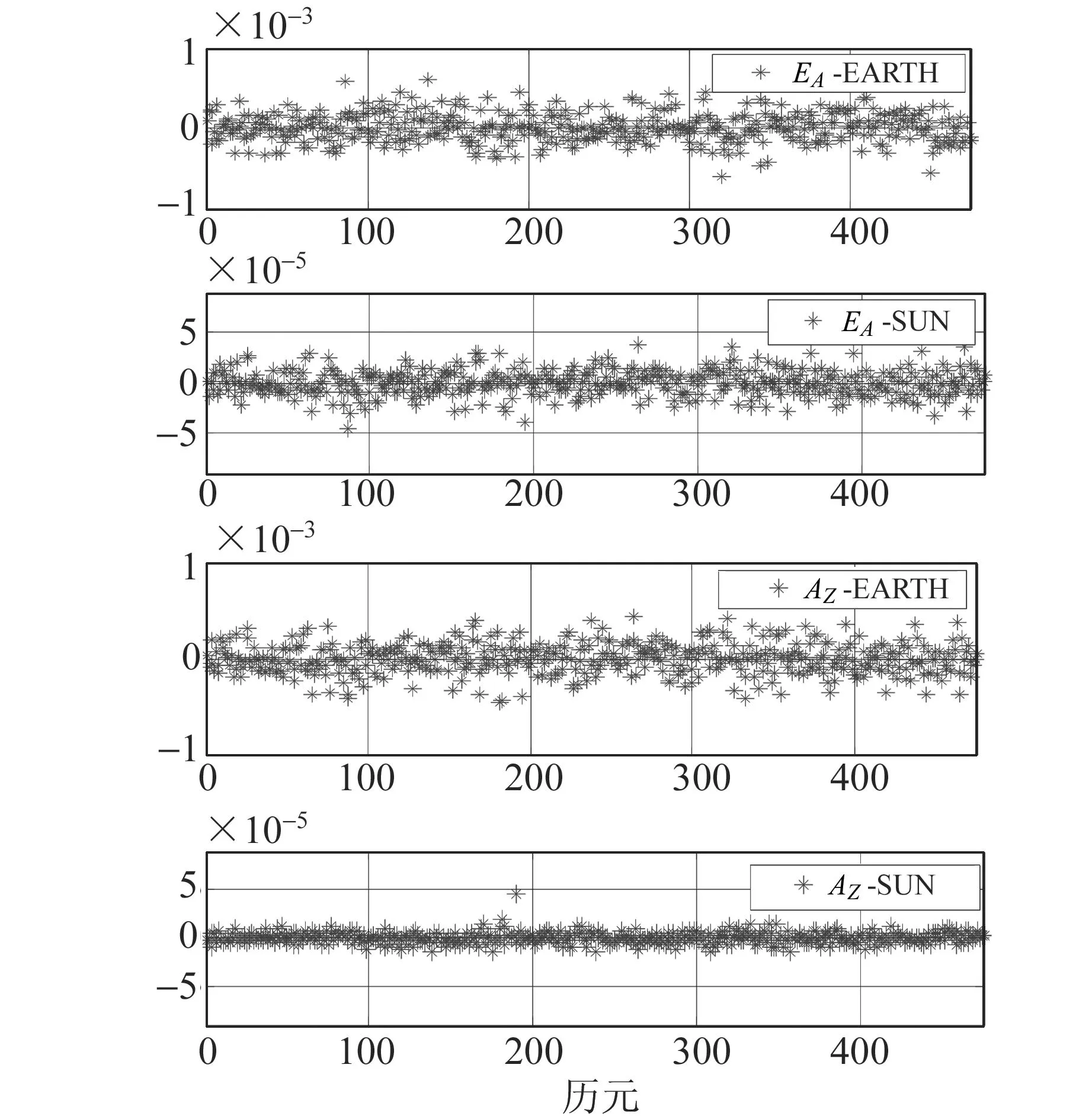
图1 天文导航解算的观测值残差Fig.1 Plots of observation residuals calculated by celestial navigation
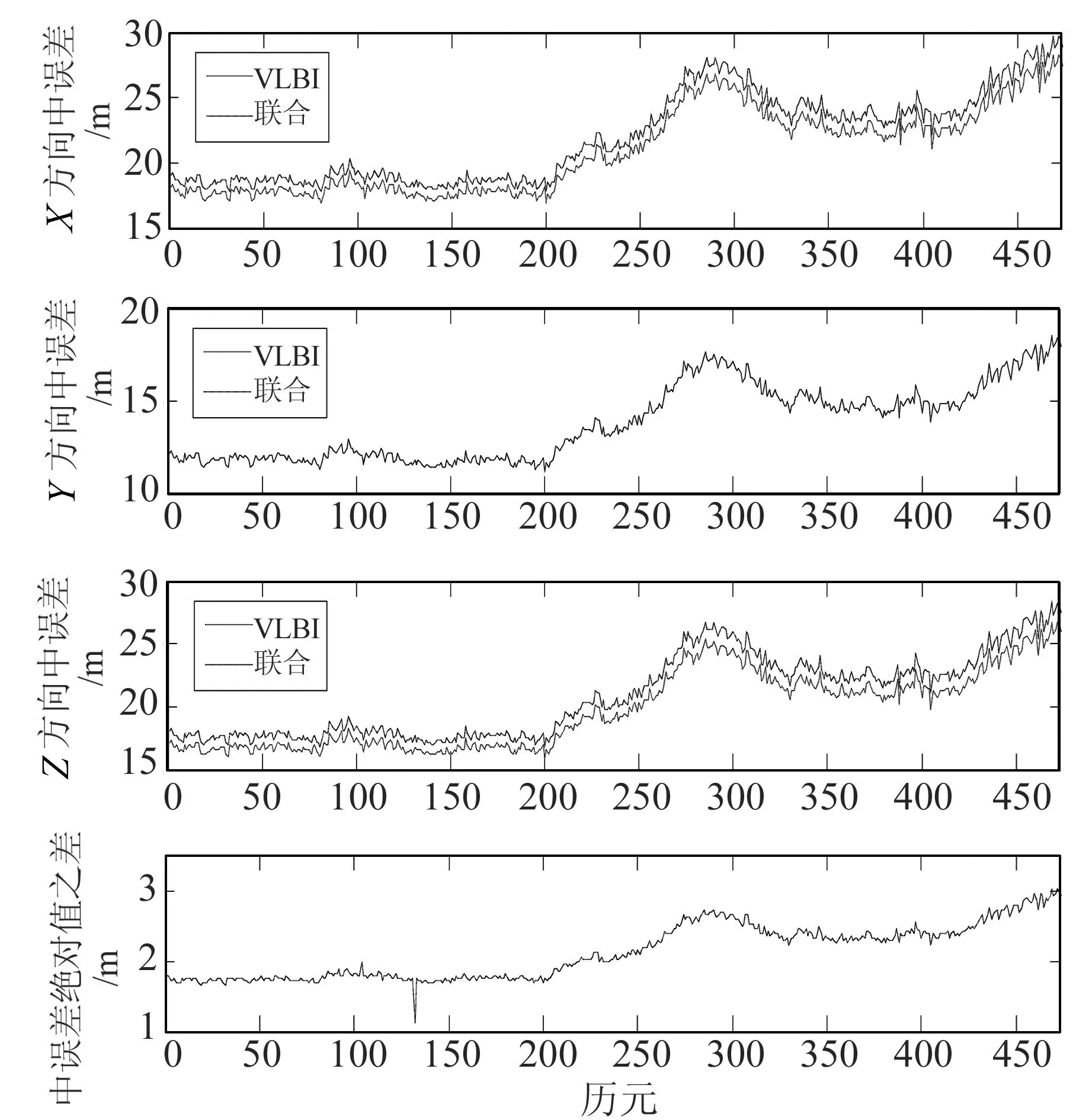
图2 联合解算和VLBI单独解算的对比Fig.2 Comparison of joint solution and single solution of VLBI
由图1可知,所有观测值的残差值接近于0,并且没有出现系统性误差,呈白噪声分布趋势,说明仿真过程成功解算了参数值。同时可以看出,地球敏感器的加入误差比太阳敏感器要大,这是由于太阳的光源极强、视场很大,太阳敏感器的分辨率可达到角秒级;而地球敏感器工作波段一般选在14~16 μm的二氧化碳红外窄波段上,收敛速度较慢且对初始误差非常敏感,导致地球敏感器的测量精度相对较差[7-9]。
月球车定位实际是一个不断迭代求解的过程。通过误差方程求解获得改正数,再将初值和改正数之和作为待求参数,进一步构造误差方程进行解算,直到小于一定的阔值时解算得到最终值。图2表示分别采用VLBI技术和联合定位时,月球车X、Y、Z3个方向的坐标中误差,最下面的图表示两者的三维坐标中误差绝对值之和的差值。
可以看出,联合解算较VLBI单独解算在X方向、Z方向的精度有一定程度的提高,Y方向变化不明显。X方向精度提高的最大值为2.0 m,最小值为0.60 m,平均值为1.02 m;Z方向精度提高的最大值为2.14 m,最小值为0.67 m,平均值为1.10 m;Y方向提升的最大值为0.07 m。这是因为,观测信号的投影大都集中在Y方向,Y方向反映了较真实的观测精度[10],故联合解算较VLBI单独解算改善较小。三维坐标中误差绝对值之和的差值,最大为4.14 m,最小为1.11 m。这说明,联合解算较VLBI单独解算提高了月球车定位的精度。图3表示的是联合解算和VLBI解算分别求得的X、Y、Z参数的差值DX、DY、DZ。
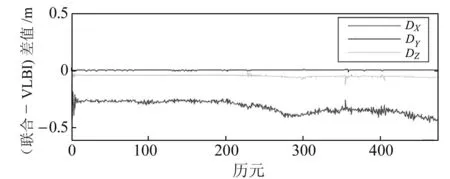
图3 参数解算的差值Fig.3 Difference of parameters calculation
由图3可以看出,联合解算和VLBI单独解算得到的月球车月固坐标的差值很小,Y方向和Z方向几乎为0,X方向也都小于0.5 m。这说明,联合VLBI和天文导航进行月球车月固坐标参数求解的过程是正确的。
图4、图5分别表示天文导航单独解算和联合解算时经纬度方向的误差(模拟值和解算值之间的差值)。可以看出,由于天文导航短时精度受测量仪器精度的限制,导致其精度较低,在单独采用天文导航进行解算时,经纬度方向的误差较大并且波动也较大。而采用联合解算时,因为加入了VLBI观测量和距离限制条件,使得经纬度方向的误差波动小了很多。纬度方向误差范围在-31~-33 m,经度方向误差范围在5.5~6.5 m。在加入VLBI观测量之后,天文导航的解算更加稳定且解算精度有较大提升。
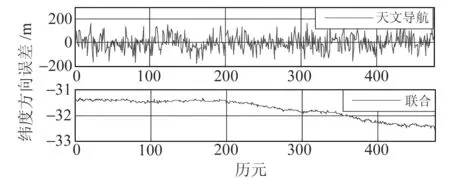
图4 纬度方向误差对比Fig.4 Comparison of error in latitudinal direction
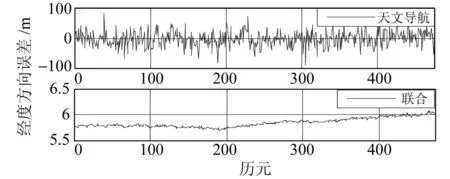
图5 经度方向误差对比Fig.5 Comparison of error in longitude direction
3 结 语
本文分别介绍并推导了月球车VLBI定位模型、天文导航定位模型以及VLBI联合天文导航定位模型。模拟了天文导航观测量,并以嫦娥三号(CE-3)实测数据进行解算。
1)在加入天文导航后,联合解算较VLBI单独解算在X、Z方向的坐标误差有所减小,月球车定位的精度得以提升。
2)在加入VLBI观测量之后,天文导航的解算变得更加稳定,精度也得到较大提升。
该联合定位模型也存在不足,例如VLBI定位方式的主要优势是角向精度较高,缺陷是视向精度较差。就星敏感器的工作原理而言,也是角度敏感的观测方式。如果将VLBI数据和测距、测速数据结合,则角向、视向精度会更高,二者结合会有更好的互补性。
参考文献
[1]宁晓琳,房建成. 一种基于天体观测的月球车位置姿态确定方法[J]. 北京航空航天大学学报,2006,32(7):756-757(Ning Xiaolin, Fang Jiancheng. Position and Pose Estimation by Celestial Observation for Lunar Rovers [J]. Journal of Beijing University of Aeronautics and Astronautics, 2006,32(7):756-757)
[2]乔书波,李金岭,孙付平. VLBI在探月卫星定位中的应用分析[J]. 测绘学报,2007, 36(3):262-268(Qiao Shubo, Li Jinling, Sun Fuping. Application Analysis of Lunar Exploration Satellite Positioning by VLBI Technique[J].Acta Geodaetica et Cartographica Sinica, 2007, 36(3):262-268)
[3]Moore M, Wang J. An Extended Dynamic Model for Kinematic Positioning[J]. The Journal of Navigation, 2003,56(1): 79-88
[4]李征航,魏二虎,王正涛,等. 空间大地测量学[M]. 武汉: 武汉大学出版社,2010(Li Zhenghang, Wei Erhu, Wang Zhengtao,et al. Space Geodesy[M]. Wuhan: Wuhan University Press, 2010)
[5]Benjamin P M. Celestial Navigation on the Surface of Mars[R]. ADA392455,2001
[6]崔希璋,於宗俦,陶本藻,等. 广义测量平差[M]. 武汉:武汉大学出版社,2009(Cui Xizhang, Yu Zongchou, Tao Benzao, et al. Generalized Surveying Adjustment[M]. Wuhan: Wuhan University Press, 2009)
[7]岳富占,崔平远. 基于地球敏感器和加速度计的月球车自主定向算法研究[J]. 宇航学报,2005,26(5):553-557(Yue Fuzhan, Cui Pingyuan. Earth Sensor and Accelerometer Based Autonomous Heading Detection Algorithm Research of Lunar Rover[J]. Journal of Astronautics, 2005, 26(5):553-557)
[8]张万永. 高精度太阳敏感器原理与精度稳定性分析[J].光电技术应用,2009,24(6):32-33(Zhang Wanyong. Analysis of Principle and Accuracy Reliability of High Accurate Sun Sensor[J]. Electrooptic Technology Application, 2009, 24(6):32-33)
[9]吴江. 月球探测器多源天文自主导航方法研究[D]. 哈尔滨:哈尔滨工业大学,2013(Wu Jiang. Study on Multi-source Celestial Autonomous Navigation of Lunar Probe [D]. Harbin: Harbin Institute of Technology, 2013)
[10] Wei E H, Jin S G, Yang H Z, et al. Simulation and Results on Real-Time Positioning of Chang’e-3 Rover with the Same-Beam VLBI Observations[J]. Planetary and Space Science,2013,84: 20-27
Foundation support:National Natural Science Foundation of China,No.41374012.
About the first author:WEI Erhu, professor, PhD supervisor, majors in space geodesy and geodynamics, E-mail: ehwei@sgg.whu.edu.cn.
收稿日期:2015-09-08
第一作者简介:魏二虎,教授,博士生导师,主要从事空间大地测量和地球动力学研究,E-mail: ehwei@sgg.whu.edu.cn。
DOI:10.14075/j.jgg.2016.08.011
文章编号:1671-5942(2016)08-0703-05
中图分类号:P228
文献标识码:A
Positioning Results of Lunar Rover Based on Combined VLBI and Celestial Navigation
WEIErhu1TANGShenquan1JINShuanggen2LIUJingnan3
1School of Geodesy and Geomatics,Wuhan University,129 Luoyu Road, Wuhan 430079,China2Shanghai Astronomical Observatory, CAS,80 Nandan Road, Shanghai 200030,China3GNSS Research Center,Wuhan University,129 Luoyu Road, Wuhan 430079,China
Abstract:The calculation formula of lunar rover positioning based on VLBI and celestial navigation is presented in the paper. The results of VLBI positioning and joint positioning based on combined VLBI and celestial navigation are calculated with the measurement data of Chang’e-3 (CE-3). This shows that joint positioning can improve the positioning accuracy of lunar rover by celestial navigation or VLBI alone. Furthermore, joint positioning can also guarantee the reliability and stability of lunar rover positioning.
Key words:VLBI;celestial navigation;joint positioning;deep space exploration;lunar rover
项目来源:国家自然科学基金(41374012)。
猜你喜欢
发明与创新·大科技(2020年3期)2020-05-13
发明与创新·大科技(2020年1期)2020-04-17
旗帜文摘(2019年3期)2019-09-10
百科知识(2019年5期)2019-03-18
新民周刊(2019年4期)2019-01-30
太空探索(2016年9期)2016-07-12
航天返回与遥感(2016年6期)2016-01-03
中学科技(2015年7期)2015-07-03
党建文汇·上(2014年1期)2014-07-03
语文世界(小学版)(2014年1期)2014-05-05