
基于Kane方法的双旋弹飞行动力学建模及仿真
2016-08-30 06:49钟扬威王良明常思江傅健
飞行力学 2016年4期
钟扬威, 王良明, 常思江, 傅健
(南京理工大学 能源与动力工程学院, 江苏 南京 210094)
基于Kane方法的双旋弹飞行动力学建模及仿真
钟扬威, 王良明, 常思江, 傅健
(南京理工大学 能源与动力工程学院, 江苏 南京 210094)
针对双旋弹飞行动力学建模,提出了基于Kane方法建立树形多刚体系统动力学方程的方法。分析了双旋弹后体和前体的运动,并分别建立了其动力学方程,综合得到了双旋弹的七自由度飞行动力学方程。基于四元数转换,建立了双旋弹转动运动学方程。通过编程对双旋弹的无控和有控运动特性进行了仿真分析。结果表明,双旋弹无控时以小迎角稳定飞行;有控飞行时弹体产生配平迎角,且纵向和横向修正会出现交叉耦合。
飞行动力学; 多体系统动力学; Kane方法; 双旋弹
0 引言
近年来,双旋弹作为一种极具潜力的二维弹道修正弹,引起了国内外众多专家学者的关注。双旋弹由地面火炮平台发射,采用低成本GPS/MIMU等测量弹丸的速度、位置、姿态等信息,通过预测算法快速预测弹丸的落点,获得落点与预定目标距离和方向的二维偏差信息。弹载控制系统根据预测落点偏差信息和弹道修正策略,形成距离和方向修正指令,由鸭舵执行机构按规定的时序修正弹丸的落点和方向偏差。鸭舵执行机构(前体)安装在弹丸头部,与后体由滚转轴承连接,在飞行过程中前体以低速绕弹体纵轴旋转[1-2]。
与传统旋转弹相比,双旋弹多了一个滚转自由度,弹道修正阶段还会受到鸭舵控制力和控制力矩的作用,使得其飞行动力学模型不同于传统弹箭。Wernert等[3]在非滚转弹体系下建立了装有CCF引信的旋转弹的七自由度非线性运动模型,并通过该模型计算了弹丸的平衡性及操纵性。该模型含有迎角和侧滑角的导数,便于分析弹丸的角运动。文献[4-5]根据牛顿第二定律和动量矩定理,推导了七自由度刚体的质心运动方程和绕质心运动方程,采用该模型对鸭式布局双旋弹的弹道特性进行了仿真分析。王志刚等[6]采用凯恩方法建立了包含弹头和后体动力学特征的双旋火箭弹动力学模型,综合考虑了弹头和后体的相互作用,最终得到了7个标量的动力学方程。王毅等[7]研究了修正组件、弹体运动与弹丸运动的关系,分析了弹丸飞行过程中两刚体间的相互作用,综合两刚体的运动学和动力学方程建立了7D弹道模型。张开创等[8]分别建立了弹丸与修正组件的六自由度弹道模型,并通过两者的运动耦合关系建立了具有相对滚转向量的七自由度弹道模型。
本文利用Kane方法在解决多刚体动力学问题方面的优越性,通过多刚体系统的树形结构描述和运动描述,给出了用Kane方法建立系统动力学方程的一般计算公式。在此方法的基础上,通过对双旋弹后体和前体的运动分析,综合建立了双旋弹七自由度飞行动力学模型,并对双旋弹无控和有控时的弹道特性进行了仿真分析。
1 树形多刚体系统动力学建模
1.1多刚体系统的树形结构描述
在图1所示的系统中,刚体1是其他所有刚体的参考体,称为系统的主刚体。对两个相互联结的刚体,与主刚体相距较近的刚体称为上级刚体,相距较远的称为下级刚体。

图1 系统树形结构Fig.1 Tree structure of the system
为了建立系统的动力学方程,可以先把各部分看成相互独立的系统,分别建立各自的动力学方程,再利用各部分的连接关系,将已有的各部分的动力学方程合并为系统的动力学方程。
根据Kane方程的思想,广义速度矩阵up确定以后,刚体上任意质点相对于惯性参考系的绝对速度v及刚体的绝对角速度ω可以表示为偏速度vp和偏角速度ωp的线性迭加,即:
(1)
式中:p=1,2,…,n为该刚体的广义速度的个数。因此,对一个刚体来说,其偏速度vp和偏角速度ωp反映了其运动特征。同样,对于一个系统,其运动特征也可由其偏速度和偏角速度来表示。这样,系统的动力学方程便可由各个刚体的偏速度和偏角速度组合得到[9]。
1.2多刚体系统的运动描述
如图2所示,刚体a和b为多刚体系统中两个相邻的刚体,其中a为b的上级刚体,选择b相对于a做刚性运动的广义速度为坐标变量;da点为刚体a自身运动的参考点;dba为刚体b相对于刚体a运动的参考点;db为刚体b上的某参考点。在db点建立与刚体a在该点的运动固连的坐标系,称为sba坐标系;在db点建立与刚体b的刚性运动固连的坐标系,称为sb坐标系。
图2 系统运动描述Fig.2 Description of the system motion
刚体b相对于刚体a的运动可以用db点相对于dab点的相对运动和sb坐标系相对于sba坐标系的相对转动来描述。设刚体a属于A系统,且A系统的广义速度为up0(p0=1,2,…,nA),刚体b为A系统外与刚体a相连接的刚体。设刚体b相对于刚体a的自由度为nba,则对于刚体b的相对运动可以选择nba个广义速度。描述刚体b运动的广义速度为nb个,则:
(2)
按照广义速度的展开式,刚体b上任一点pb的偏速度和偏角速度可表示为:
(3)
(4)

1.3多刚体系统动力学方程的一般形式
设刚体b属于B系统,且与A系统中的刚体a相连,则可建立由B系统和A系统形成的C系统的Kane动力学方程。
各系统的广义惯性力矩阵Δf*(k)中的元素为:
(5)

(6)
(7)
式中:k=A,B;I为转动惯量矩阵。
各系统的广义主动力矩阵f(k)中的元素为:
(8)
式中:F(k)和M(k)为作用在系统k上做功的力和力矩的合力。根据Kane方程,系统的广义主动力和广义惯性力之和为零,即:
(9)
其中:
因此,系统的动力学微分方程为:
(10)
2 双旋弹飞行动力学建模
2.1坐标系的定义
(1)地面坐标系Oxyz:O点为炮口;Ox为射击面与水平面的交线,指向射击方向为正;Oy在铅垂平面内,向上为正;Oz按右手法则确定。地面坐标系为动坐标系,在忽略地球自转的情况下可将其视为惯性系。
(2)基准坐标系C(1)xyz:C(1)点为后体质心,该坐标系由Oxyz平动而得到。其三轴的单位向量设为i,j,k。
(3)弹道坐标系C(1)x2y2z2:C(1)x2与弹体速度v的方向一致;C(1)y2在包含速度v的铅垂平面内垂直于C(1)x2,向上为正;C(1)z2按右手法则确定。
(4)弹轴坐标系C(1)ξηζ:C(1)ξ与弹轴一致,指向弹头方向为正;C(1)η在铅垂平面内垂直于C(1)ξ,向上为正;C(1)ζ按右手法则确定。其三轴的单位向量设为iξ,jη,kζ。
(5)后体坐标系C(1)xayaza:C(1)xa轴沿弹轴方向;C(1)ya轴和C(1)za轴固连在后体上,并与后体一起绕C(1)xa旋转。后体坐标系可视为由弹轴坐标系转动γa角得到。
(6)前体坐标系C(2)xfyfzf:C(2)为前体质心;C(2)xf轴沿弹轴方向;C(2)yf轴和C(2)zf轴固连在前体上,并与前体一起绕C(2)yf旋转。后体坐标系可视为由弹轴坐标系转动γf角得到。
2.2坐标转换
弹轴坐标系C(1)ξηζ由基准坐标系C(1)xyz按3-2次序转动φ1和-φ2角度得到,对应的四元数qna为:
(11)
其中:
2.3后体的运动描述
后体质心的位置及速度矢量、后体的转动角速度、弹轴坐标系的转动角速度分别为:
(12)
(13)
(14)
(15)
选取广义速度矩阵为:
(16)
利用广义速度,后体的速度和角速度表示为:
(17)
表1 偏速度、偏角速度及其导数Table1 Partialvelocities,partialangularvelocitiesandtheirderivatives
2.4前体的运动描述
选择前体质心C(2)作为参考点,前体绕过C(2)的轴线作单自由度转动。C(2)点的位置矢量为:
(18)
式中:r(2,1)为前体质心对后体质心的矢径,取弹轴系中的分量形式。
前体的转动角速度矢量为:
(19)
式中:ω(2,1)为前体相对后体的转动角速度,表示为:
(20)
选取广义速度矩阵为:
(21)
后体C(2)点的速度矢量为:
(22)
利用广义速度,后体的速度和角速度表示为:
(23)
(24)
(25)
(26)

表2 偏角速度及其导数Table2 Partialangularvelocitiesandtheirderivatives
2.5双旋弹动力学方程的一般形式
(27)
(28)
式中:F(k)和M(k)的计算参见文献[2]。F(k)需要向基准系投影,M(k)向弹轴系投影。
系统动力学方程为:
(29)
其中:
2.6双旋弹运动学方程
(30)
(31)

弹道系的转动角为:
(32)
后体滚转角γ1和前体滚转角γ2分别为:
(33)

3 弹道仿真
3.1无控飞行仿真

图3 双旋弹弹道轨迹Fig.3 Trajectory of the dual-spin projectile
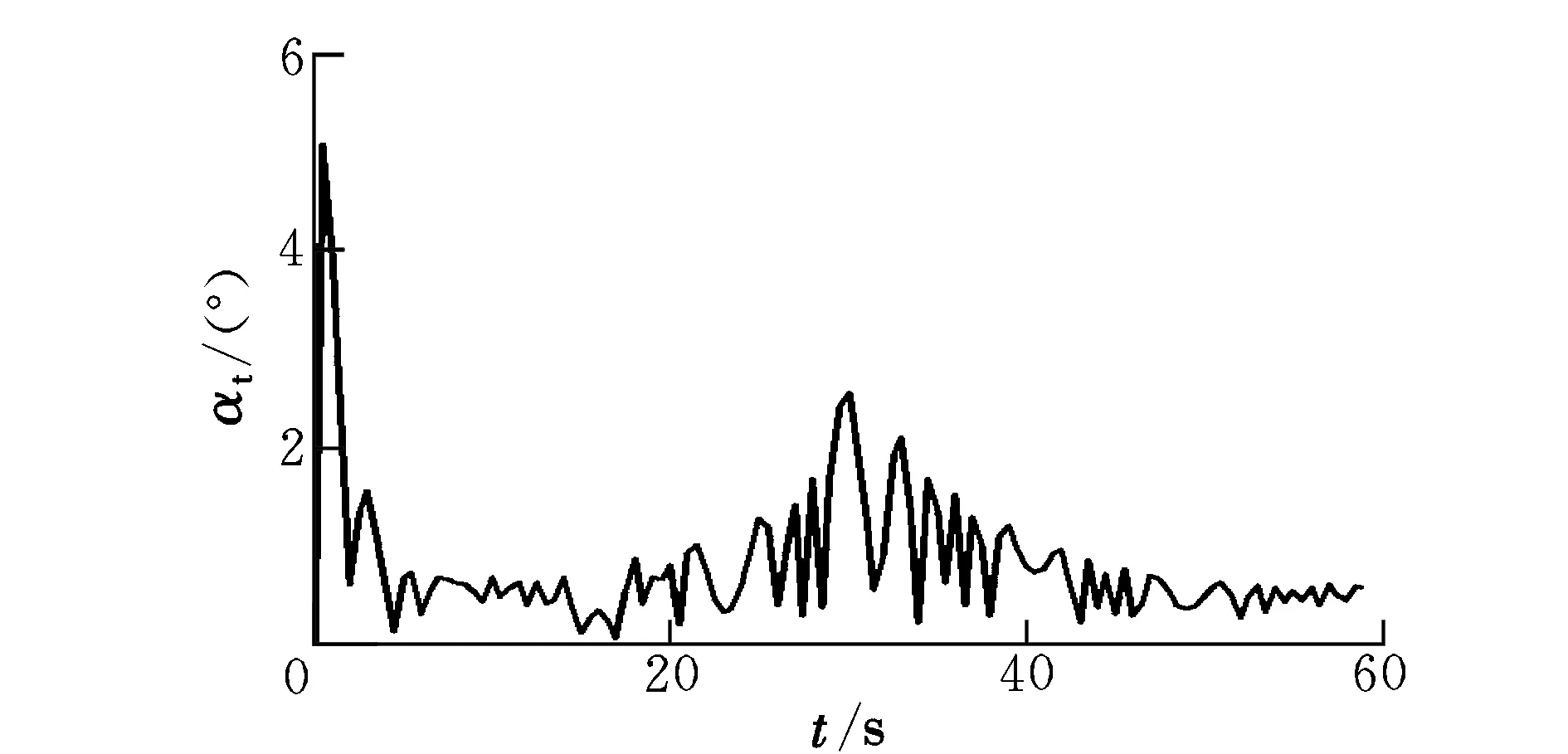
图4 双旋弹总迎角曲线Fig.4 Curve of total AOA of the dual-spin projectile
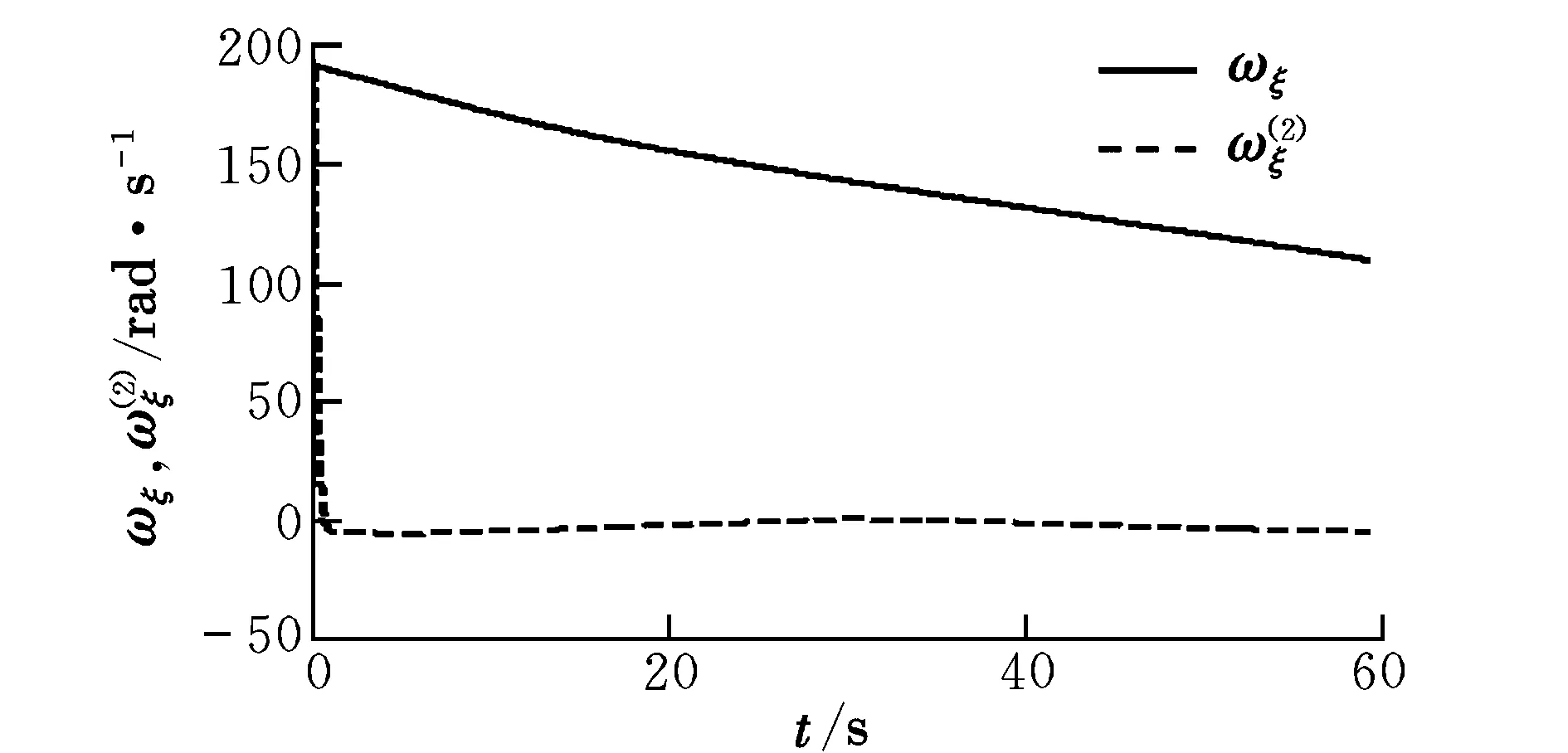
图5 前后体转速曲线Fig.5 Curves of spin rate for front and rear parts
由图3和图4可以看出,双旋弹无控飞行的最大弹道高为4 538 m,飞行距离为13 547 m。迎角振荡衰减并且趋向于零,表明其无控飞行是稳定的。
由图5可以看出,双旋弹后体转速虽然随时间逐渐衰减,但依然保持高速旋转状态。前体的转速在出炮口后约1 s内衰减到-5 rad/s 左右,并一直维持在这个转速附近。
3.2有控飞行仿真
仿真初始条件与无控时相同,在弹道顶点处开始控制,前体滚转角γ2分别固定为0°,90°,180°和270°,落点修正距离如表3所示,双旋弹的总迎角如图6所示。固定舵偏角δw=8°时,前体的修正量与前体滚转角γ2的对应关系如图7所示。
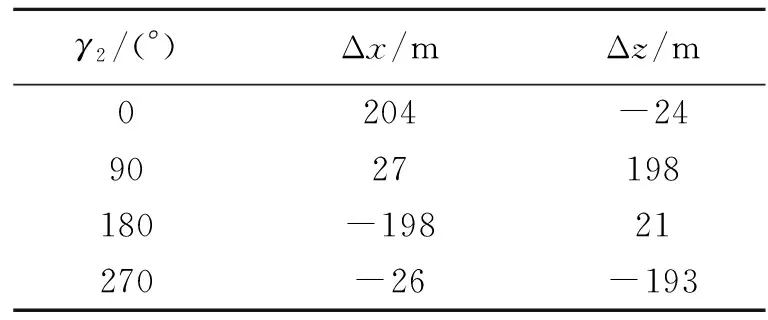
表3 前体修正距离Table3 Correcteddistancesoffrontpart

图6 双旋弹总迎角曲线Fig.6 Curves of total AOA of the dual-spin projectile

图7 修正量与滚转角对应图Fig.7 Reciprocal diagram between correction distances and roll angles
由表3可以看出,进行射程修正(γ2=0°,180°)时,对偏流产生了影响。对偏流修正(γ2=90°,270°)时也会对射程产生影响,这主要是由于双旋弹的纵向和横向运动存在交叉耦合造成的。这种现象从图7中也可以清晰地看出。
此外,由图6可知,加入控制力后,总迎角不再振荡趋近于零,而是产生了配平迎角。特别是加入向左的控制力后(γ2=270°),迎角在结束阶段出现增大的趋势。可见,横向控制力对弹丸的飞行稳定性产生了影响。
4 结束语
本文给出了基于Kane方程建立树形多刚体系统动力学方程的一般方法,该方法推导过程简洁、规范,方程中不出现理想约束力,最后得到的模型较简单,便于计算机编程求解。基于该方法建立了双旋弹飞行动力学方程,并对某型双旋弹开展了无控和有控仿真计算。得到了双旋弹总迎角、前后体转速、修正量等弹道参数的运动规律,为后续开展双旋弹飞行稳定性分析、修正方案研究等提供了参考。目前,国内对双旋弹的研究尚处于初步阶段,实际飞行过程中的角运动特性、控制特性等还需进一步开展研究。
[1]许诺,于剑桥,王亚飞,等.固定翼双旋弹动力学特性分析[J].兵工学报,2015,36(4):602-609.
[2]朱大林.双旋弹飞行特性与制导控制方法研究[D].北京:北京理工大学,2015.
[3]Wernert P,Theodoulis S.Modelling and stability analysis for a class of 155 mm spin-stabilized projectiles with course correction fuse [R].AIAA-2011-6269,2011.
[4]Chang S J,Wang Z Y,Liu T Z.Analysis of spin-rate property for dual-spin-stabilized projectiles with canards [J].Journal of Spacecraft and Rockets, 2014,51(3):958-966.
[5]常思江,王中原,刘铁铮.鸭式布局双旋弹飞行动力学建模与仿真[J].弹道学报,2014,26(3):1-6.
[6]王志刚,李伟,张振宁.双旋制导火箭弹动力学建模[J].兵工学报,2013,34(7):910-915.
[7]王毅,宋卫东,佟德飞.固定鸭舵式弹道修正弹二体系统建模[J].弹道学报,2014,26(4):36-41.
[8]张开创,刘秋生,王龙.基于固定鸭舵的弹道修正弹建模与仿真[J].弹道学报,2015,27(1):40-44.
[9]张延教,王良明.多体系统动力学中的偏速度综合法[J].华东工学院学报,1989(2):55-62.
[10]周江华,苗育红,李宏,等.四元数在刚体姿态仿真中的应用研究[J].飞行力学,2000,18(4):28-32.
(编辑:李怡)
Modeling and simulation of flight dynamics for dual-spin projectile based on Kane’s method
ZHONG Yang-wei, WANG Liang-ming, CHANG Si-jiang, FU Jian
(School of Energy and Power Engineering, NUST, Nanjing 210094, China)
As to the modeling for the flight dynamic model of dual-spin projectile, a method to establish the dynamic model for multi-rigidbody systems with tree structures was given based on Kane’s equations. The motions of the front and rear parts were analyzed. Afterwards, the dynamic models of both parts were established, and the 7-DOF flight dynamic equations were built. The kinematics equations were set up based on the quaternion transformation. The simulation analyses for uncontrolled and controlled kinetic characteristics were carried out by programming. The results show that the projectile flies stably with small angles of attack while uncontrolled. The trim angle of attack is generated while the projectile is controlled. Moreover the cross coupling will appear between the longitudinal correction and lateral correction.
flight dynamics; multi-body dynamics; Kane’s method; dual-spin projectile
2015-09-21;
2016-01-11; 网络出版时间:2016-02-29 16:38
国家自然科学基金资助(11402117)
钟扬威(1989-),男,湖北宜昌人,博士研究生,研究方向为外弹道与飞行控制、飞行力学。
TJ760.12
A
1002-0853(2016)04-0059-05
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
天津医科大学学报(2021年1期)2021-12-05
高师理科学刊(2020年2期)2020-11-26
电子制作(2019年7期)2019-04-25
北京航空航天大学学报(2017年1期)2017-11-24
现代检验医学杂志(2016年5期)2016-08-20
制导与引信(2016年3期)2016-03-20
弹箭与制导学报(2015年1期)2015-03-11
物理实验(2015年10期)2015-02-28
地震研究(2014年1期)2014-02-27
