
基于高斯混合模型的太阳电池片颜色分类设想与验证
2016-10-14 04:58封小云邱龙刚
太阳能 2016年3期
■ 封小云邱龙刚
陕西众森电能科技有限公司
基于高斯混合模型的太阳电池片颜色分类设想与验证
■ 封小云*邱龙刚
陕西众森电能科技有限公司
详细介绍了高斯模型思想以及相关算法,将不同颜色的太阳电池片分选到不同档位中,方便将同类电池片进行归类。
太阳电池;高斯混合模型;RGB、HSI颜色分量;样本训练;分块模型
0 引言
众所周知,太阳电池片的生产工艺过程复杂,生产出来的电池片颜色各异,导致光电转换效率不一,输出电流能力存在差异。不同颜色的太阳电池片串联使用时,最大输出电流由该串联电路中输出电流能力最小的电池片决定,从而降低了整体转换效率。由此可知,将不同颜色的电池片分选到不同档位显得非常重要。
长期以来,关于太阳电池片的颜色分选主要靠人的眼睛,但是由于人眼存在很强的主观意识,并且长时间的人眼分选势必会造成人眼的疲劳,进而导致工作效率下降或误检率增加。使用机器视觉的方法对太阳电池片进行分选,不仅重复精度高,而且增加检测的客观性和标准性。文中通过创建高斯混合模型,将采集的样本(事先知道样本的归类)特征加入高斯混合模型中进行训练,然后根据训练好的分类器进行待测太阳电池片的分类,从而实现颜色分类的自动化。
1 理论知识
实验中主要用的知识有颜色模型、图像特征的提取和高斯混合模型对特征的训练,其中颜色模型的选择和图像特征的选择直接影响高斯混合模型的训练结果。本节主要描述实验中选择的颜色模型和高斯混合模型的思想。
1.1颜色模型
通常采集到的彩色图像都是以RGB颜色空间呈现的[1],主要原因是该颜色模型是与设备相关的颜色模型,采用三维直角坐标系。红、绿、蓝原色是加性原色,各个原色混合在一起可以产生复合色,如图1所示。RGB颜色模型通常采用图1所示的单位立方体来表示。在正方体的主对角线上,各原色的强度相等,产生由暗到明的白色,即不同的灰度值,(0,0,0)为黑色,(1,1,1)为白色。正方体的其他6个角点分别为红、黄、绿、青、蓝和品红。
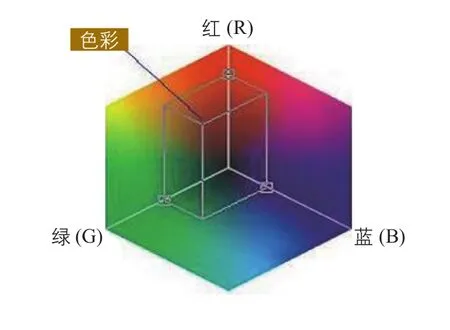
图1 RGB颜色空间模型
由于RGB颜色空间并不接近人眼的颜色空间,因此有必要将颜色空间从RGB转换到其他颜色空间。
HSI色彩空间[2]是从人的视觉系统出发,用色调(Hue)、饱和度(Saturation或Chroma)和亮度(Intensity或Brightness)来描述色彩。HSI色彩空间可以用一个圆锥空间模型来描述,虽然这种圆锥模型相当复杂,但能把色调、亮度和饱和度的变化情形表现得很清楚。通常把色调和饱和度统称为色度,用来表示颜色的类别与深浅程度。由于人的视觉对亮度的敏感程度远强于对颜色浓淡的敏感程度,为了便于色彩处理和识别[3],人的视觉系统经常采用HSI色彩空间,比RGB色彩空间更符合人的视觉特性,故而将颜色空间从RGB转换到HSI,如图2所示。在图像处理和计算机视觉中,大量算法都可在HSI色彩空间中方便地使用,它们可分开处理且相互独立。因此,HSI色彩空间可大幅简化图像分析和处理的工作量。
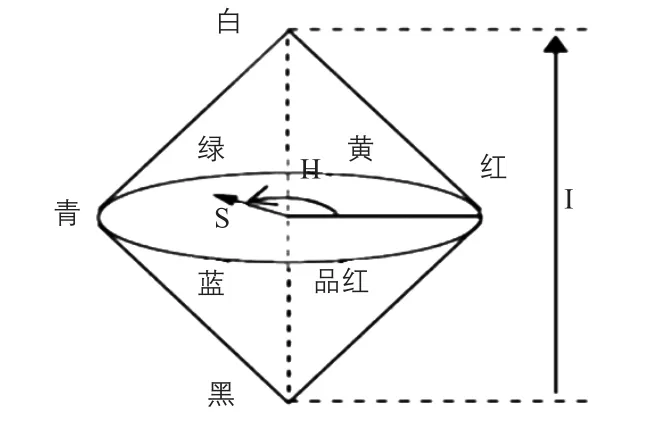
图2 HSI颜色空间模型
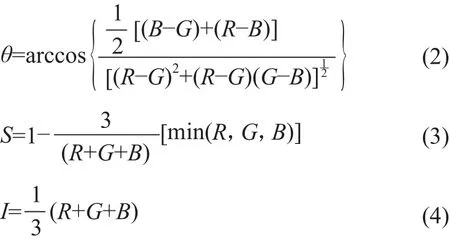
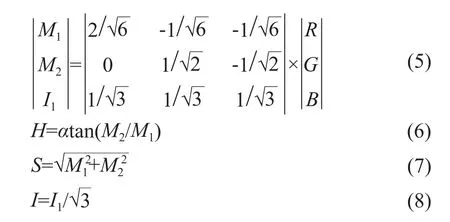
HSI色彩空间和RGB色彩空间只是同一物理量的不同表示方法,因而它们之间存在转换关系。RGB转换到HSI的相关公式如下:

其中,
1.2高斯混合模型
高斯混合模型(Gaussian Mixture Model)的本质是聚类算法[4],该方法有很多种,k-means是最简单的一种聚类方法[5]。其大致思想就是把数据分为多个堆,每个堆为一类,且都有一个聚类中心(学习的结果就是获得这k个聚类中心),这个中心就是这个类中所有数据的均值,而这个堆中所有的点到该类的聚类中心都小于到其他类的聚类中心(分类的过程就是将未知数据对这k个聚类中心进行比较的过程,离哪个聚类中心近就将其归为哪一类)。k-means是最直观、最方便理解的一种聚类方式,原则就是把最像的数据分在一起,而“像”可自定义,比如说欧式距离的最小等。
GMM和k-means十分相似,区别仅是GMM将概率引入了分类过程中。统计学习的模型有两种,一种是概率模型,一种是非概率模型。概率模型是指要学习的模型的形式是P(Y |X ),在分类的过程中,通过未知数据X可以获得Y取值的一个概率分布;也就是训练后模型得到的输出不是一个具体的值,而是一系列值的概率(对应于分类问题来说,就是对应于各个不同的类的概率),然后可以选取概率最大的那个类作为判决对象(软分类,soft assignment)。而非概率模型是指学习的模型是一个决策函数Y=f(X),输入数据X就可以投影得到唯一的一个Y,是判决结果(硬分类,hard assignment)。在GMM中,学习的过程就是训练出几个概率分布。
所谓高斯混合模型就是指对样本的概率密度分布进行估计,而估计的模型是几个高斯模型加权之和(具体个数要在模型训练前建立好);每个高斯模型代表一个类(一个Cluster);对样本中的数据分别在几个高斯模型上投影,会分别得到在各个类上的概率;最后可以选取概率最大的类做为判决结果。
从中心极限定理的角度上看,把混合模型假设为高斯混合模型较为合理,当然也可以根据实际数据定义成任何分布的混合模型,不过定义为高斯混合模型在计算上有一些方便之处。另外,理论上可以通过增加模型的个数,用GMM近似任何概率分布。
高斯混合模型的定义为:

式中,K为模型的个数;πk为第k个高斯的概率密度函数,其均值为μk,方差为σk。对此概率密度的估计即求πk、μk和σk各个变量,当求出这些变量的值后,求和式的各项结果就分别代表样本x属于各个类的概率。
2 算法描述
为了实现太阳电池片颜色的分选,文中主要使用的算法有颜色空间转换、特征提取和高斯混合模型训练。以下主要分析通过提取不同的特征,将这些特征通过高斯混合模型训练进行分类。
2.1特征提取
太阳电池片特征提取主要有两种实验方式,根据提取的两种特征派生出太阳电池片检测的两种方法。
2.1.1第一种特征提取方式
1)将原始图像进行RGB颜色空间分解。
2)在B空间的图像上根据图像的宽度和高度选取16个圆,并确保16个圆在前景太阳电池片上,如图3所示。根据图像的大小进行设定,文中实验图像像素大小为204×204,圆数量越多可能代表性越强,但随着圆个数的增加,算法的执行时间变长。为提高算法的执行效率,当图像很大时,可将图像进行分块处理。
3)计算该圆上像素值的中值作为特征。之所以选择中值,目的是在一定程度上避免太阳电池片图像上栅线对特征的影响。实验证明,在光照条件相对稳定的情况下,204×204像素大小的图像选择16个圆可以满足太阳电池片分选的要求。
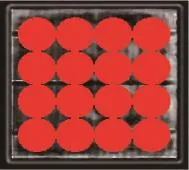
图3 16个圆的选择
2.1.2第二种特征提取方式
1)将原始图像进行不同类别分类后,将其组合为一幅大图,大图中包含不同的种类,如图4所示。

图4 不同颜色太阳电池片图像
2)将组合的大图进行RGB颜色空间分解。
3)将图像由RGB颜色空间转换到HSI颜色空间。
4)由于太阳电池片基本都是蓝色,如果将色调H作为特征,其可区分性太差,不能作为太阳电池片的代表,所以将HSI三通道图像转换SI二通道图像,将SI作为图像唯一性的表征。
2.2算法流程
首先对类别已知的样本进行训练,然后根据训练好的分类器对待检测图像进行归类。其中,训练过程如图5所示,可以将训练过程理解为一种在输入X和输出Y均已知的情况下确定函数Y=f(X)具体形式的函数拟合过程。识别过程如图6所示,可以将其理解为将类别未知的模式X作为函数f的输入,从而计算出Y值的过程。
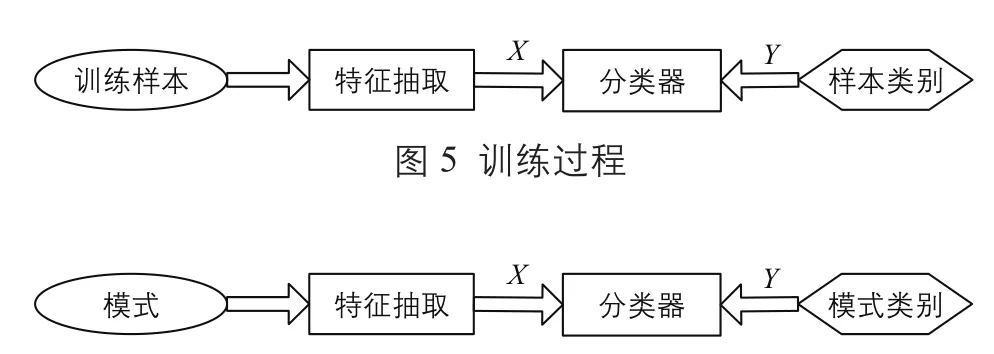
图6 识别过程
本文从两个不同的方向给出特征提取的方式,特征提取应遵循类内相似性和类间可区分性;然后将提取到的样本特征加入到创建的高斯混合模型中进行训练;通过对大量已知样本的训练,便可生成具有针对该类事物的分类器。可利用训练好的分类器将待检测太阳电池片归到合适的分类中。
3 实验验证与分析
3.1实验验证
3.1.1实验一
将不同类别的图像分为7类,将原始空间转换到SI空间,然后对图像进行训练,最后对待检测图像进行分类。
由表1可知,有些分类结果很接近。主要原因为:1)虽然图像的大小一致,但图像中太阳电池片的大小不一致,如图7所示,太阳电池片自身大小的不同导致最终面积的匹配大小可能存在偏差;2)采集到的图像打光方案不是很理想,导致图像自身都比较接近。注意:面积从左到右为39059、37601、37006、37990、38411、38939、37600,单位为像素。

图7 图像中太阳电池片的定位
3.1.2实验二
该方法是将拍摄到的图像进行RGB颜色分解,在B通道中,在前景图像(太阳电池片图像)上根据图像的高度和宽度画指定半径的圆,然后计算圆上像素点的中值作为特征进行高斯混合模型训练,选择中值的原因是防止太阳电池片栅线对颜色的影响。
实验中使用的图像大小为204×204像素,圆的选择如图3所示。每次从16个圆中将8个圆作为一组,如图8所示。其中,粉色部分是第一组的8个圆,黄色部分是第二组的8个圆,白色部分是第三组的8个圆。这里圆组的选择方式是横向选择,当然也可以纵向选择三组8个圆。

图8 16个圆中8个圆的选择方式
根据不同的组合,模拟不同的样本进行训练。检测阶段,选择16个圆中8个圆不同组成,选择方式如上所述。为了进一步确保分类的准确性,对3组(4行3组)8个圆使用少数服从多数的原则进行颜色归类,即保证3组中有两组以上分类成功。
实验结果表明,如果单纯使用一组8个圆可能会导致分类结果出错。但加上对3组8个圆使用少数服从多数的原则,误检率明显降低。
在图像增大时,需要选择更多的圆进行训练,或将图像分割为不同的小块,在不同的小块中使用上述方法,并增加进行识别的组进行检测。
3.2实验环境要求
实验中对检测图像在同一环境中进行拍摄,位置要求:
1)检测过程中需要将太阳电池片的图像相对固定,不能存在较大角度,如图9所示,其中图像以白色作为背景,太阳电池片为蓝色区域。
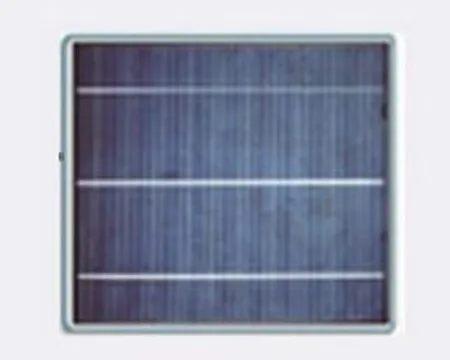
图9 太阳电池片在图像中的位置
2)由于分类器是事先训练好的,对环境的要求比较严格,最好是在暗室中,光照条件基本稳定。如果环境不稳定的话就要重新训练分类器。
3.3实验结论
通过实验一和实验二,并对其检测结果进行分析,同一相机下拍摄到的像素大小为204×204不同颜色的太阳电池片图像,两个实验都是通过对大量样本进行学习、训练,可将太阳电池片很好的归类,与预期分类结果一致。如图10所示,将下面的图像准确的分类为浅浅蓝、浅蓝、蓝、深蓝、深深蓝、亮片和跳色。
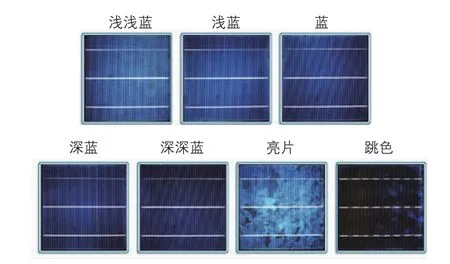
图10 太阳电池片分类结果
4 结论
实验中给出太阳电池片分选的指导思想和方向,暂时将太阳电池片颜色分为7档,可以根据要求训练已知类别的样本,实现更多不同档位太阳电池片的分选。即针对不同大小的图像,在实验二的方法中可以选择不同个数的圆,选择不同个数的组进行分类,具体的个数可以对已知样本的大量训练和分类得到。另外,实验中选择HSI颜色空间和圆上像素值的中值作为特征进行分类器的训练,只有能够很好地区分不同颜色的太阳电池片,可以选择其他太阳电池片的特征作为高斯混合模型的训练特征。
[1]顾明, 郑林涛, 尤郑. 基于颜色空间转换的交通图像增强算法[J]. 仪器仪表学报, 2015, (8): 1901-1902.
[2]邢岳,陈华秀,李伟越,等. 基于HSI颜色空间的交通标志图像分割算法研究[J]. 中国高新技术企业, 2014, (8): 93-94.
[3] 郑小东, 高洁, 张晓煜. 基于颜色空间转换的混合豆类分类识别[J]. 中国粮油学报, 2015, (4): 103-104.
[4]朱峰, 罗立民, 宋余庆, 等. 基于自适应空间邻域信息高斯混合模型的图像分割[J]. 计算机研究与发展, 2011, (11): 2001-2003.
[5]宋余庆, 谢月华, 朱玉全, 等. 基于近似密度函数的医学图像聚类分析研究[J]. 计算机研究与发展, 2006, (11): 1947-1952.
2016-01-13
封小云(1987—),男,硕士、软件工程师,主要从事图像处理和机器视觉方面的研究。fxy@gsola.cn
猜你喜欢
北京航空航天大学学报(2021年7期)2021-08-13
上海航天(2020年3期)2020-07-01
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
装备环境工程(2018年7期)2018-08-01
北京航空航天大学学报(2017年7期)2017-11-24
少儿科学周刊·儿童版(2015年11期)2015-12-17
电影故事(2015年16期)2015-07-14
