
风力发电系统共振规避控制策略研究
2016-10-14 04:58韩莉娅杨建国徐兰琴赵辉李学
太阳能 2016年3期
■ 韩莉娅 杨建国徐兰琴 赵辉 李学
云南品森科技有限公司
风力发电系统共振规避控制策略研究
■ 韩莉娅 杨建国*徐兰琴 赵辉 李学
云南品森科技有限公司
通过使用人工风洞模拟不同等级的风对风力发电机运行情况进行实验,观察到风机转速与系统固有频率接近时,系统振动较为强烈,并从充、放电控制角度提出一种快速通过系统共振频率的解决方案。通过该控制方法的应用能够缩短因风力发电机旋转速率与系统固有频率接近时产生共振的时间,减小因共振对系统造成的影响。
风光互补;风力发电;共振;PWM调制;控制器
0 引言
随着可再生能源的发展和人们对居住环境的逐渐重视,清洁能源的使用与需求在不断增加,世界各国都出台相关政策鼓励和支持清洁能源的发展。我国政府对可再生能源的开发利用也给予了高度重视,积极引导科研院所和企业进行研究创新。目前全国各地在城市基础设施建设和美丽乡村建设中都在积极推动太阳能路灯、风光互补路灯、大型风力发电站等项目实施。
在风光互补路灯和大型风力发电站工作过程中,当在一定风速和功率跟踪的情况下,风力发电机叶片转动速率与系统固有频率接近时会出现安装支架或路灯灯杆摇晃幅度较大的问题,即系统发生共振[1],此时系统工作存在很大的风险性。因此,人们主要从系统安装角度出发寻求解决之道,如通过加大风力发电机安装基座尺寸和重量、加深安装基础深度,都可改善系统工作摇晃的问题。但在风光互补路灯、风力发电户用系统、小型离并网系统等中小型系统中,从安装角度考虑减小安装支架摇晃问题并不是最经济的方法。
1 控制原理与研究方法
针对上述提出的问题,我们从控制角度出发,让风力发电机工作过程中的叶片转速与系统共振频率接近和相同的时间尽量短,从而避免因系统长时间共振造成的安装连接器件松动,降低系统故障率,减少安装支架或灯杆的维护次数,降低风力发电系统后期使用与维护成本。
1.1控制电路
如图1所示,电路由整流滤波电路、电压电流数据采样电路、开关管驱动电路、中央处理器(MCU)、开关与Buck电压变换电路等主要部分组成。正常工作情况下,风力发电机产生的电能通过整流滤波电路后变为直流电,之后由MCU通过驱动电路控制Buck电路中开关MOSFET管工作实现电压及最大功率点跟踪功能,Buck电路输出端直接连接到蓄电池正、负极给蓄电池充电,通过对MCU编程便能够实现最大功率点跟踪和快速通过共振频率区的目的。
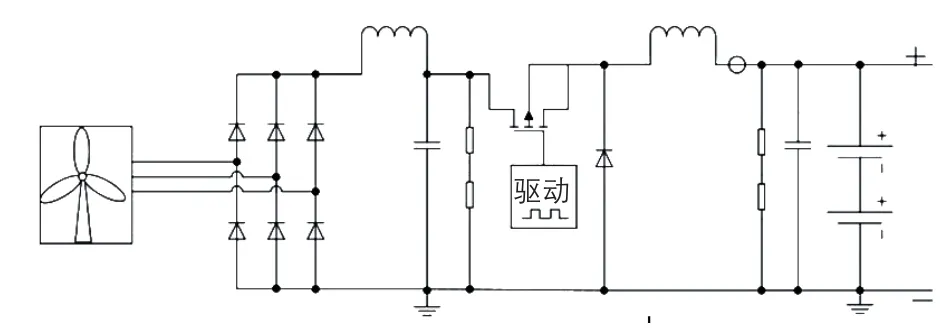
图1 电路原理图
1.2控制方式
风力发电系统最大功率点跟踪(MPPT)方法[2]主要有最优叶尖速比法、功率信号反馈法、爬山搜索法、三点比较法、模糊逻辑搜索法、占空比扰动法。本实验采用爬山搜索法(也称扰动观察法)进行最大功率点跟踪,以简化控制电路,降低电路与控制程序的复杂程度,其具体控制方法为:系统上电完成初始化启动后,便启动低频最大功率点跟踪函数开始搜寻风力发电机最大功率点;随着风速加大,风力发电机转速增加,输出电压升高,输出功率变大,当风力发电机功率升高到一特定值(如图2中危险频率下临界点fdL)并且风速继续增加时,MCU启动风机转速快速提升控制程序,此时控制器不再跟踪风力发电机的最大功率点,而是使用脉宽调制信号控制开关电路的占空比,使得风力发电机叶片转动速度快速增加至危险频率控制区上临界fdH以上,然后MCU启动高频最大功率点跟踪函数进行高转速时的最大功率点的跟踪控制。
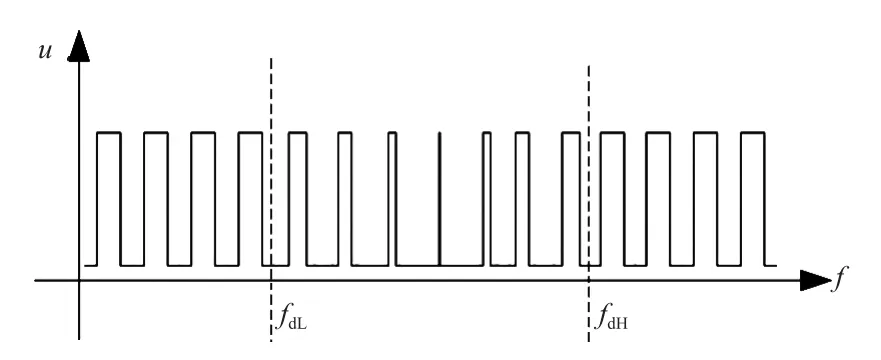
图2 风机转速快速提升控制脉冲
如图3所示,当风速持续降低,风机功率下降,高速最大功率点跟踪运算难以维持时,MCU启动风机转速快速降低控制程序,使得风机叶片转速快速降低,从而快速通过系统的危险频率。当风机转速低于危险频率控制区下临界点后,MCU启动低频最大功率点跟踪函数进行低速时的最大功率点跟踪控制。
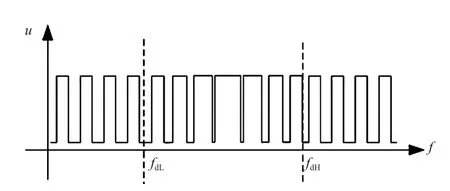
图3 风机转速快速降低控制脉冲
1.3实验方法
实验设备:300 W垂直轴风力发电机、12 V 100 AH蓄电池、震动传感器ND-3、示波器MSO1104Z、人工风洞、数字风速仪VC816、控制电路板、20 W LED灯、万用表。
首先将风力发电机安装固定稳定,然后将振动传感器安装在风力发电机安装支架上,连接好相关电路并可进行实验。为准确对比两种方案的差异性,除控制程序不同外,其他硬件设备均相同。
为避免因蓄电池在充电过程中被充满而影响控制器判断,控制器输出端连接1个20 W的LED灯负载,以保持蓄电池始终处于未充满状态。
1.3.1采用普通最大功率跟踪算法控制
启动风洞开关,并逐步增加风速,记录不同风速下风力发电机的相关电气参数及安装支架抖动情况。图4为普通最大功率跟踪情况下系统发生共振的信号图。
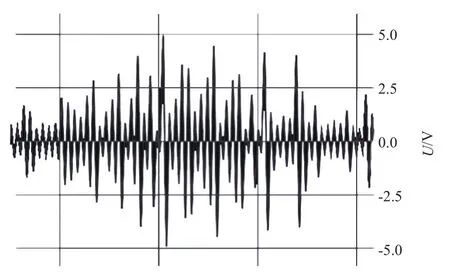
图4 普通MPPT风机支架振动波形图
1.3.2共振规避最大功率跟踪快速通过危险频率算法控制
所有外部条件和实验方式与采用普通最大功率跟踪算法控制相同,仅控制算法有所不同。
使用振动传感器和示波器观察震动情况,采用快速通过危险频率方式和采用普通最大功率追踪控制方式的振动波形,如图5所示。
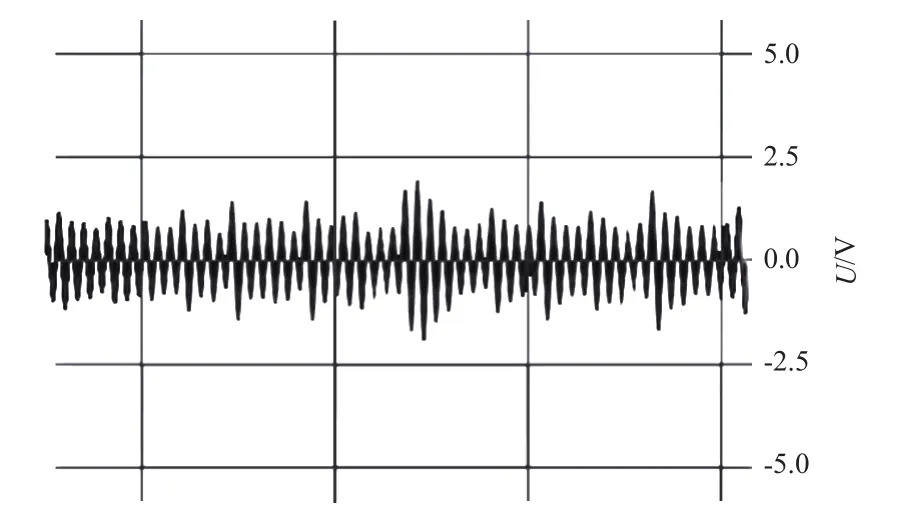
图5 共振规避MPPT风机支架振动波形图
1.3.3对比分析
从测试波形可看出,采用普通最大功率跟踪算法控制程序时,在经过系统共振频率时,风力发电机安装支架振动较为强烈。而采用共振规避最大功率跟踪快速通过危险频率算法控制时,风力发电机的安装支架振动情况比较平稳,无特别明显的振动波形出现。
2 结论
通过测试波形可知,共振规避最大功率跟踪快速通过危险频率算法能够有效减轻风力发电机叶片旋转造成的共振问题,从而降低系统故障率,减少后期运营维护成本,在中小系统应用中有较好的适应性和经济性。但由于其在通过危险频率期间存在最大功率点跟踪功能失效的情况,所以在大型风力发电机控制策略上有待进一步研究引入快速通过危险频率功能所带来的成本降低和电能损失之间的技术经济合理性。
[1] 张永明, 林钓斌, 孙斌, 等. 风力发电机风叶系统的振动测试及研究[J]. 机械制造, 2013, 51(582): 41-45.
[2] 程启明, 程尹曼, 汪明媚, 等. 风力发电系统中最大功率点跟踪方法的综述[J]. 华东电力, 2010, 38(9): 1393-1399.
2015-07-26
杨建国(1986—),男,本科,主要从事风力发电系统、风光互补控制系统、光伏系统应用、自动化控制方面的研究。547362564@qq.com
猜你喜欢
防爆电机(2022年1期)2022-02-16
故事作文·高年级(2021年12期)2021-12-21
装备制造技术(2020年4期)2020-12-25
电子制作(2019年7期)2019-04-25
当代陕西(2018年12期)2018-08-04
人大建设(2017年6期)2017-09-26
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
军事文摘(2016年16期)2016-09-13
智能建筑电气技术(2015年5期)2015-12-10
