
超高速永磁无刷电机无位置传感器半闭环启动法
2016-11-19 06:56张前冯明
电机与控制学报 2016年10期
张前, 冯明
(北京科技大学 机械工程学院,北京 100083)
超高速永磁无刷电机无位置传感器半闭环启动法
张前, 冯明
(北京科技大学 机械工程学院,北京 100083)
针对超高速永磁无刷电机无位置传感器启动过程中低速时无法准确提取反电动势信号的问题,提出一种半闭环启动方法。该方法可以使电机由静止阶段通过单步加速迅速切换到闭环加速阶段,当电机闭环加速至可以检测到稳定的反电动势信号时在一个换相周期内切换到正常运行。该启动方法无需任何附加电路,整个启动过程稳定,不会出现因扰动或负载变化引起的失步,可以很好地解决超高速永磁无刷电机无位置传感器启动问题。依据此启动方法开发出一套永磁无刷电机驱动器并进行实验验证,证明该启动方法可以快速地启动永磁无刷电机,且能在80 000 r/min时平稳运行。
永磁无刷电机;反电动势;无位置传感器;启动;超高速电机
0 引 言
目前大多数永磁无刷电机通过在电机内部安装霍尔传感器来提取转子位置信息以确定定子通电相序。霍尔位置传感器可以保证电机准确地换相,但同时也带来了一些问题,如可靠性降低,不能耐高温,制造成本上升等。因此,对无位置传感器永磁无刷电机控制策略的研究,一直是电机控制领域研究的热点与难点。目前常见的方波驱动永磁无刷电机无位置传感器控制方法主要有反电动势法[1-5]、续流二极管法[6]、磁链函数法[7]、电流注入法和状态观测器法[8]等。其中反电动势法在实际开发中用的比较广泛,也是目前比较实用的一种无位置传感器控制方式。在反电动势法控制中, 由于永磁无刷电机的反电动势与电机转速成正比,在启动前不存在反电动势, 在低速时反电动势非常小,难以准确提取反电动势过零点。因此,如何准确快速地启动电机一直是反电动势法控制中面临的关键问题。
目前常用的无位置传感器启动方法中,三段式启动法[9]和升频升压启动法[10]是通过开环加速将电机加速到能够稳定地检测到反电动势信号后切换到正常运行状态,这就导致了加速曲线复杂、启动过程优化难度大、启动程序兼容性差、抗干扰能力弱等问题。
预定位法对每次换相的切换时间有较为严格的要求, 而且要求电机转子转动惯量及其他电机参数必须非常准确,否则在加速过程中会因为误差积累而导致启动失败,当电机负载变化时,启动程序也要相应调整,否则会造成堵转、反转等[11-12]。
短时脉冲法是按照一定规律对定子绕组施加6个短时检测脉冲,通过对比相应脉冲峰值,得出转子具体位置,该方法是建立在铁心电感磁饱和性质基础上的,如果永磁无刷电机的定子绕组是空心线圈或电机转子本身是一个圆柱状永磁体则以上方法的可靠性将降低,且该方法对启动超高速电机效果并不理想[13-14],另外如果在使用反电动势法控制的电机上使用该方法则需额外增加电流传感器,增加硬件成本。
上述启动方法各有优缺点,但是其启动过程并未结合超高速电机转子转动惯量小,电机内阻和电感极小的特点,因而导致其启动超高速电机的效果不够理想。文中紧密结合超高速电机运行特性提出了一种超高速永磁无刷电机半闭环启动法,该方法可以较好地解决超高速永磁无刷电机启动问题。
1 半闭环启动法实现
该半闭环启动法实现过程如图1所示。
1)通过预定位将转子定位于确定位置;
2)通过单步加速给转子一定的初始速度;
3)切换到闭环加速阶段同时进行信号对比;
4)当信号对比法判定反电动势信号足够稳定时切换到正常运行阶段。

图1 半闭环启动法流程图Fig.1 Flow chart of semi-close-loop startup method
1.1 转子预定位
为了防止电机处于定位盲区时预定位失败,预定位阶段采用二次定位法,先导通A-B(A-B代表电流由A相流入B相流出)相再导通A-C相,其中导通A-B时间可以较短,只需保证转子动起来即可,导通A-C相时间应该足够长以保证将转子稳定定位于图2所示位置。
1.2 单步加速
转子定位于图2位置后,若转子逆时针旋转,下一步需导通B-A相(由A-C切换到B-A可以产生比由A-C切换到B-C更大的单步加速角度),如图3所示。

图2 转子预定位示意Fig.2 Schematic diagramfor rotor pre targeting
此阶段根据电机特性及运行条件首先给定单步加速阶段的电流,然后根据加速电流计算得到单步加速时间TB-A,电流的给定可以以电机能够承受的最大电流为限,较大电流有利于启动过程顺利进行。

图3 单步加速阶段示意Fig.3 Schematic diagramfor one step acceleration
为了简化计算,在计算过程中作如下假设:
1)单步加速过程中电流为恒流;
2)转子磁感应强度在定子绕组中按正弦规律变化(若定子绕组中磁感应强度按梯形波规律变化,则计算公式相应改变);
3)忽略电机齿槽效应。
根据电磁感应定律,转子所受电磁力矩为

(1)
式中:Tm为电机电磁力矩;R为电枢绕组的等效半径;L为电枢绕组的有效长度;B为电枢绕组处的磁感应强度峰值;N为绕组匝数;IB为B相绕组电流。如图3,磁感应强度B在OM方向上的分量为Bcosθ,θ为OM与转子N极之间的夹角,N极相对于OM沿逆时针旋转时θ为正。
从图4中可以看出在B-A通电条件下,转子N极在B点到C点之间受到的电磁力矩与转向都是同向的,在B点和A’点之间θ为锐角,受到的电磁力矩大,A’点和C点之间随着θ增加,受到的电磁力矩逐渐减小,在C点时θ为90°,此时转子受到的电磁力矩为零。设电磁力矩与阻力矩相等的点为Z点,Z点之前转子一直处于加速阶段,Z点之后转子开始减速,因此单步加速阶段与闭环加速阶段的最佳切换点应该取在Z点。在Z处存在下式关系:

(2)
解得:

(3)
式中:θZ为转子N极在Z点时转子N极与OM的夹角;TL为负载力矩;其中包含了摩擦阻力矩、风阻和有效负载转矩等。

图4 单步加速与闭环加速切换点示意Fig.4 Schematic diagram of the switch point from one step acceleration to close loop acceleration
由电磁力矩公式结合能量守恒定律可知,在转子与OM夹角为θ时:

(4)
解得此时角速度为
(5)

由式(1)和式(5)可得

(6)
由公式(6)可得单步加速时间TB-A为

(7)
以电流IB作为加速电流,按照B-A相导通方式供电,导通TB-A时间即可完成单步加速阶段。
1.3 闭环加速
单步加速以后启动程序切换到闭环加速阶段,由于单步加速法是通过单步加速将转子加速到一定速度,因而闭环加速阶段初期转子转速不可能很高,在闭环切换点Z处反电动势信号非常微弱,另外由于反电动势检测电路中电压比较器可以承受的最大差分电压有限,为了保证反电动势电压处于电压比较器工作范围以内,在反电动势检测电路中必须进行分压。
图5为A相反电动势信号分压滤波电路,通过分压可以保证电压比较器在全电压全速度范围内正常工作,但同时分压也减小了反电动势信号的幅值,进一步增加了启动的难度。

图5 A相反电动势分压滤波电路Fig.5 BEMF division and filtering circuit for phase A
分压导致本身就极小的反电动势信号变得更加微弱,微弱的反电动势信号很容易受到干扰,对于反电动势法控制,其主要干扰包括电流换相时续流引起的钳位电压干扰和功率电路的电磁干扰。对于钳位电压干扰可以通过电容C1滤除,但对于电磁干扰却无法有效控制。驱动器内部,逆变器和三相绕组是最主要的电磁噪声源,因此闭环加速时提取反电动势信号必须尽可能排除逆变器电磁噪声对反电动势信号的干扰。当逆变器处于全关断状态且绕组续流结束时,三相绕组处于完全悬空的状态,此时驱动器内部没有大电流流动和功率开关的通断,因此可以保证在低电磁噪声的环境下提取反电动势信号,经实验验证,在三相悬空时检测反电动势信号可以极大拓展检测到准确反电动势信号的最低转速范围。
闭环加速过程如图6,图中反电动势信号三位数字分别对应A、B、C三相检测到的的反电动势信号,1代表高,0代表低。转子逆时针旋转,以A-B相通电周期(101)为例,将闭环加速阶段每个换相周期分为若干个通电周期Tcycle,每个通电周期分为关断延时Toff和通电加速Ton两部分,在关断延时Toff开始时将六个功率开关全部关断,当Toff结束时检测转子位置信号,然后根据得到的转子位置信号决定Ton阶段的导通方式。

图6 闭环加速阶段示意图Fig.6 Schematic diagram for close loop accelerating stage

由于高速电机电感很小,实际续流时间很短,插入关断延时对启动过程的影响较小,因此在实际中可以适当增加Toff的值以确保三相绕组续流完全结束。闭环加速过程的时间关系需满足:Tcycle=Ton+Toff,Ton>>Toff>Tfollow。

图7 闭环加速阶段A-B相通电及续流示意Fig.7 Schematic diagram for energizing and freewheeling on phase A-B at close loop accelerating stage
1.4 信号对比
随着闭环加速阶段的进行,反电动势信号逐渐变强,当反电动势信号足够克服干扰因素以后就可以切换到正常运行状态。大多数无位置传感器启动方式是通过检测6个连续且按换相次序产生的反电动势信号作为由启动阶段切换到正常运行阶段的依据,这种方式引起的问题是没法在检测到足够强的反电动势信号时尽快切换到正常运行。对于超高速电机,启动过程中可能在几个甚至一个换相周期即可达到正常运行所需转速,因此检测六个连续且按换相次序产生的反电动势信号无疑会延长启动时间。根据超高速电机的这一特性,采用一种信号对比法来判断是否可以由闭环加速阶段切换到正常运行阶段,此方法可以在一个换相周期内判断反电动势信号能否够克服电路中各种噪声的干扰,从而使电机更快地从启动阶段切换到正常运行阶段。
设两个用于存储信号的变量SA和SB,SA为闭环加速阶段所提取的反电动势信号,检测周期为Tcycle;同时周期性地检测反电动势信号SB。SB的检测频率应远高于SA,但SB检测频率过高会占用过多CPU资源,检测频率过低则可能漏掉反电动势信号中的干扰信号,导致误切换,根据经验此检测频率可以设为20~100 kHz。
仍以A-B相通电为例,该信号对比法实现过程如图8,图中反电动势信号指的是反电动势信号提取电路输出的实际反电动势信号,箭头所示位置为提取反电动势信号的位置,SA是在Toff结束时提取的反电动势信号,该信号是已经排除了电磁噪声干扰的准确的反电动势信号。SB是高频检测到的任意时刻的反电动势信号。当在一个换相周期内能得到稳定的SB信号时说明反电动势信号已经足够克服电磁噪声的干扰,在下一换相周期即可切换到正常运行。

图8 信号对比法Fig.8 Signal comparison method
在一个换相周期内判定SB信号是否稳定的方法如下:
第一步:当SA改变时触发一次判定周期,记为SA1≠SA2,在SA1到SA2期间,SB改变一次;
第二步:SA2到SA(n-1)过程中SA、SB均未改变且SA恒等于SB;
第三步:当SA再次改变时,记为SA(n-1)≠SAn,在SA(n-1)到SAn期间,SB改变一次。
其中SAn是为了方便表述该过程而引入的不同时刻SA的值,SAn中n值在每个判定周期从1开始递增。若在一个判定周期内上述三个条件都满足,则认为SB已经稳定,可以切换到正常运行阶段,若在判定过程中任何一个条件不满足则认为SB不稳定,从下次SA改变时开始新一轮判定周期。
通过信号对比法,判定反电动势信号足够稳定后切换到正常运行阶段,整个半闭环启动过程结束。
2 实验验证
2.1 实验电机
离心式空气压缩机作为一种高速旋转机械,是将电动机的机械能转换为气体压力能的一种装置。其额定转速一般比较高,可达每分钟几万转甚至十几万转,其工作时机械阻尼主要有轴承摩擦阻尼和叶轮的风阻,其中叶轮风阻为电机的有效负载。本驱动器实验用电机为用于燃料电池汽车的离心式空气压缩机,其作用是给燃料电池电堆反应提供足够的高压空气以提高质子膜处氢氧反应的效率。
实验用电机如图9,对于这种超高速电机,由于其绕组电感和内阻非常小,一旦失步会引起绕组电流迅速增加,烧毁功率器件甚至造成电机磁钢退磁,因此保证其稳定可靠地启动尤为重要。燃料电池在工作过程中其输出电压会在250~400 V之间变化,这就要求电机在此电压范围内均能够稳定启动。实验电机参数见表1。

图9 实验用空气压缩机Fig.9 Experimental air compressor

电机参数 数值额定功率/kW10额定转速/(r/min)80000极对数1线电感/μH80线电阻/mΩ40额定电流/A50电池电压/V250~400转子转动惯量/(kg·m2)5×10-5
2.2 驱动器设计
运用半闭环启动法设计的永磁无刷电机驱动器如图10,其拓扑结构如图11。由于超高速电机线电感较小,在逆变器处直接斩波会引起电机绕组内电流剧烈波动,导致转子涡流损耗增加,因此在逆变器前端设计了Buck电路,通过Buck电路调节供给逆变器的直流电压来控制电机运行速度,在三相逆变器处只进行换相,不斩波,经实验验证,该方法可以有效降低转子涡流损耗。

图10 实验驱动器Fig.10 Experimental drive

图11 驱动器拓扑结构Fig.11 Topological structure of the drive
反电动势信号检测电路如图12,电机三相端电压经过分压滤波以后与虚拟中性点N进行比较从而得到反电动势信号。经实验发现当分压电阻和滤波电容分别取100 k、10 k和5 nF,转速达到57 000 r/min,功率达到2.9 kW时,采用30°相位延时法无法滤除二极管续流引起的钳位电压干扰。因此,该驱动器低速时采用30°相位延时法,高速运行时采用90°相位延时法。这就导致了电机速度变化的时候反电动势信号检测电路引起的相位延时也在改变,因此在运行过程中必然要通过软件进行相位补偿。以A相分压滤波电路为例,高速运行时软件外加相位延时可以由式(8)计算得到。

(8)

图12 反电动势信号检测电路Fig.12 Detection circuit of BEMF
2.3 实验波形分析
将实验空压机单步加速以后关断所有功率开关让其自由滑行,单步加速电流设为40A,单步加速时间设为13ms,采集此过程中三相反电动势信号Sa、Sb、Sc和B相电流,如图13所示。
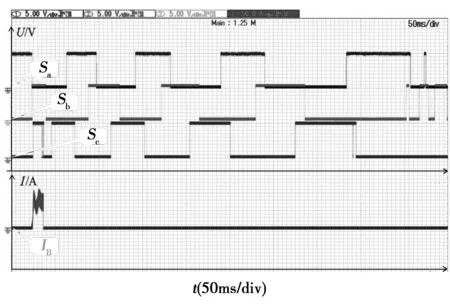
图13 单步加速后三相反电动势信号和B相电流Fig.13 Three phase BEMF signals and current of phase B after one step acceleration
通过图13可以看出,单步加速后转子滑行阶段提取的反电动势信号非常准确,单步加速后转速可以达到800 r/min左右,当转速降到400 r/min时仍可检测到准确的反电动势信号。该实验证明,既然驱动器可以在单步加速后自由滑行阶段得到稳定的反电动势信号,那么运行过程中必然也可以在排除外界干扰后获得正确的转子位置信号,这就为由单步加速阶段向闭环加速阶段切换提供了条件。
通过闭环加速法启动实验用空压机得到的反电动势信号Sa、Sb、Sc和B相电流如图14所示,单步加速电流设为40 A,单步加速时间设为13 ms,通电周期Tcycle设为1 500 μs,其中Toff设为200 μs,Ton设为1 300 μs。

图14 启动过程反电动势信号及电流波形Fig.14 BEMF signals and current waveforms during startup process
图中窗口1为整个启动过程波形,窗口2为启动阶段放大后的波形图,其中单步加速阶段电流高频波动是由于在逆变器处通过斩波进行电流调节引起的,闭环加速阶段电流波动是由于以Tcycle为周期通断电引起的。从图中可以看出,单步加速后第一个完整换相周期三相反电动势信号已足够稳定,在经过信号对比检测到一个换相周期的稳定反电动势信号后切换到正常运行阶段。窗口3为闭环加速阶段放大后的波形图,在Toff阶段,该相电流从-20 A上升到0 A,Ton阶段,电流从0A降到-20 A。
实验空压机在80 000 r/min空载波形如图15所示。由于电机空载时负载较小,反电动势和供电电压比较接近,方波供电与正弦波反电动势不匹配引起的电流波动比较大;另外由于转速较高,旋转频率达1.33 kHz,换相频率达8 kHz,因而电流波形出现一定程度的扭曲。从频谱分析的结果可以看出,由于电流波形扭曲,只有基频成分比较明显,其余各次谐波成分均不明显,且杂波比较多。
实验空压机60 000 r/min带载波形如图16。

图15 80 000 r/min空载电流波形及频谱分析Fig.15 No-load current waveform and FFT analysis at 80 000 r/min

图16 60 000 r/min带载电流波形及频谱分析Fig.16 Current waveform and FFT analysis with load at 60 000 r/min
带载条件下电机电流较大,供电电压与反电动势相差较大,方波供电和正弦波反电动势不匹配引起的电流波形扭曲不明显,且60 000 r/min时的换相频率相对于80 000 r/min时也有所降低,因而其电流波形明显好转,频谱分析得到的各次谐波成分比较明显,相对于图15所示电流波形,杂波明显减少。
3 结 论
针对超高速永磁无刷电机反电动势法运行提出了一种简单可靠的半闭环启动方案,通过理论分析及实验验证,证明了本启动方法的可行性。
结合超高速永磁无刷电机的特点,该半闭环启动法:
1)对启动电压的稳定性要求较低,适用于启动电压不固定的场合;
2)通过单步加速给转子提供一定初始速度,可以充分利用超高速电机转子转动惯量较小这一特点;
3)采用信号对比法加快切换速度,只需一个换相周期即可确定反电动势信号是否稳定;
4)启动过程除单步加速外均闭环进行,与开环启动过程相比,同样启动电流下产生的启动力矩大,启动速度快,抗干扰能力强。
该启动方法是针对超高速离心式空压机提出的并已在空压机上通过实际运行验证其可行性。使用该启动方法的驱动器可以在实际工况下100%启动目标空压机。
[1] ACARNLEY P P, WATSON J F. Review of position-sensorless operation of brushless permanent-magnet machines[J].IEEE Transactions on Industrial Electronics, 2006, 53(2): 352-362.
[2] DAMODHARAN P,VASUDEVAN K.Sensorless brushless DC motor drive based on the zero-crossing detection of back electromotive force(EMF) from the line voltage difference[J].IEEE Transactions on Energy Conversion,2010,25(3): 661-668.
[3] CUI Chenjun, LIU Gang, WANG Kun, et al. Sensorless drive for high-speed brushless DC motor based on the virtual neutral voltage[J].IEEE Transactions on Power Electronics,2015,30(6): 3275-3285.
[4] 王强,王友仁,王岭,等. 无位置传感器无刷直流电机闭环起动方法[J]. 电机与控制学报, 2013, 17(11): 41-46.
WANG Qiang, WANG Youren, WANG Ling, et al. Closed-loop starting method for sensorless brushless DC motor[J]. Electric Machines and Control, 2013, 17(11): 41-46.
[5] 杨影,阮毅,陶生桂. 一种新型无刷直流电机转子位置检测方法[J]. 电机与控制学报, 2010, 14(2): 60-64.
YANG Ying, RUAN Yi, TAO Shenggui. Research on novel approach to rotor position detection of brushless DC motors[J]. Electric Machines and Control, 2010, 14(2): 60-64.
[6] OGASAWARA S, AKAGI H. An approach to position sensorless drive for brushless DC motors[J].IEEE Transactions on Industry Applications,1991, 27(5): 928-933.
[7] ERTUGRUL N, ACARNLEY P. A new algorithm for sensorless operation of permanent magnet motors[J].IEEE Transactions onIndustry Applications, 1994, 30(1): 126-133.
[8] KIM H, SON J, LEE J. A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J]. IEEE Transactions on Industrial Electronics,2011, 58(9): 4069-4077.
[9] 杜晓芸,林瑞光,吴建华. 无位置传感器无刷直流电机的控制策略[J]. 电机与控制学报, 2002, 6(1): 21-25.
DU Xiaoyun, LIN Ruiguang, WU Jianhua. The control of position-sensorless brushless DC motor[J]. Electric Machines and Control, 2002, 6(1): 21-25.
[10] 王冉冉,刘玉庆. 无位置传感器无刷直流电机起动的比较与研究[J] . 微电机, 2003, 36(1): 29-30, 49.
WANG Ranran, LIU Yuqing. Start development and compare of the sensorless BLDC motor controlled by DSP[J]. Micromotors, 2003, 36(1): 29-30, 49.
[11] 刘明基,王强,邹继斌等. 电动势换向无刷直流电机的预定位方式起动[J] . 微特电机, 1999, 27(2): 8-10.
LIU Mingji, WANG Qiang, ZOU Jibin, et al. The start method by means of rotor pre-setting for the brushless DC motor of electro-motive force commutation[J]. Small & Special Electrical Machines, 1999, 27(2): 8-10.
[12] 汤长波,顾敏明,潘海鹏. 无位置传感器无刷直流电机启动方法研究[J]. 浙江理工大学学报, 2011, 28(6): 886-889.
YANG Changbo, GU Minming, PAN Haipeng. Reasearch on sensorless brushless dc motor starting methods[J]. Journal of Zhejiang Sci-Tech University, 2011, 28(6): 886-889.
[13] JANG G H, PARK J H, CHANG J H. Position detection and start-up algorithm of a rotor in a sensorless BLDC motor utilising inductance variation[C]//Electric Power Applications, IEE Proceedings, 2002,149(2):137-142.
[14] 邓灿,张森林. 一种新的无刷直流电机起动方法[J].微电机, 2002, 35(6): 29-31, 60.
DENG Can, ZHANG Senlin. A new start control strategy for brushless DC motor[J]. Micromotors, 2002, 35(6): 29-31, 60.
(编辑:刘素菊)
Semi-close-loop startup method for sensorless ultra-high-speed permanent magnet brushless motor
ZHANG Qian, FENG Ming
(School of Mechanical Engineering, University of Scienceand Technology Beijing, Beijing 100083, China)
To solve the problem that sensorless ultra-high-speed permanent magnet brushless motor(PMBM)can not get the precious back electromotive force(BEMF) signals at low speed, a semi-close-loop startup method is put forward.With this method,the motor was accelerated to close-loop operation within one step of accelerating and shifted to BEMF operating within one commutation period when the drive got stable BEMF signals.By this startup method,the ultra-high-speed PMBM was started stably,without any external circuits and going out of step because of disturbance or change of load.It verifies that the drive with this startup method can start up PMBM quickly and operate at 80 000 r/min stably.
permanent magnet brushless motors; back electromotive force; position sensorless; startup; ultra-high-speed motors
2015-03-06
国家“863”计划(SS2012AA110501)
张 前(1988—),男,博士研究生,研究方向为高速永磁同步电机控制系统;
冯 明(1963—),男,教授,博士生导师,研究方向为高速电机设计及其控制。
冯 明
10.15938/j.emc.2016.10.007
TM 301.2
A
1007-449X(2016)10-0046-09
猜你喜欢
微电机(2022年8期)2022-10-12
九江学院学报(自然科学版)(2022年2期)2022-07-02
机电信息(2022年9期)2022-05-07
计算机仿真(2021年11期)2021-12-10
微特电机(2021年11期)2021-11-16
家庭影院技术(2021年6期)2021-07-28
郑州大学学报(工学版)(2020年2期)2020-06-16
电子制作(2019年10期)2019-06-17
汽车电器(2019年2期)2019-03-22
金桥(2018年1期)2018-09-28
