
一类具有高增益观测器的非线性系统的输出调节
2016-11-21 01:03孟桂芝李兴华宋迎春
电机与控制学报 2016年10期
孟桂芝, 李兴华, 宋迎春
(哈尔滨理工大学 应用科学学院,黑龙江 哈尔滨 150080)
一类具有高增益观测器的非线性系统的输出调节
孟桂芝, 李兴华, 宋迎春
(哈尔滨理工大学 应用科学学院,黑龙江 哈尔滨 150080)
针对具有由非线性外部系统产生的未知不确定性函数和未建模动态的非线性不确定系统,研究了其跟踪和干扰抑制问题。首先运用状态变换将输出调节问题转化为非线性系统的镇定问题,接着引入动态信号解决了动态扰动,并设计出高增益的状态观测器去估计不可测的状态。然后根据外系统信息设计自适应的非线性内模,结合自适应控制理论、Backstepping设计方法、模糊控制方法和Lyapunov法给出了输出反馈的自适应模糊控制器和自适应控制律,所提出的输出反馈控制器和自适应律能够实现整个闭环系统的跟踪和干扰抑制,并使得跟踪误差能渐近收敛到给定的任意小的领域内。最后仿真结果验证了所提出的控制器的有效性。
内模;高增益观测器;自适应控制; Backstepping技术; Lyapunov方法
0 引 言
近年来,非线性系统的输出调节问题(也称为伺服问题)已成为非线性控制的热点问题,它包括系统的镇定、干扰抑制和跟踪等特殊的控制问题。输出调节的目的是当系统的扰动由外系统生成时,要设计一个反馈控制器使得所得的整个闭环系统的所有信号最终一致有界,并达到抑制干扰和渐近跟踪。
目前,国内外已有大量关于非线性系统输出调节问题的研究成果[1-3]。非线性内模原理[3]是解决具有未知参数的非线性输出调节问题的重要工具,但对外部系统含有未知参数的情况无法处理。自适应控制[4]的引入则有效地解决上述问题。当系统中控制方向已知时,鲁棒控制[5]是常见的处理方法,当控制方向未知时,Nassbaum增益技术[6]则是强有力的手段。特别是2004年,Huang等给出了处理一般非线性系统的一个研究框架,把鲁棒输出调节问题转化为增广系统的鲁棒镇定问题[7],从而给出了处理一般非线性输出调节问题的研究框架。为了渐近跟踪给定的特殊信号而不需要外系统的信号,很多输出调节问题的解决都利用了具有状态观测器的内模设计[8-9]。Ding等根据观测器理论采用动态交换技术解决了非线性系统的输出调节问题[8],当外系统是非线性时,Xi等引入圆判据设计观测器和非线性内模解决了输出调节问题[9]。文献[10]利用饱和的高增益观测器解决了一族可反馈线性化的系统的半全局鲁棒输出调节。上述结果都是针对系统具有参数不确定性时,当系统含有非参数不确定性和未建模动态时,如何设计相应的控制器和内模使得系统能够达到整个系统的跟踪和干扰抑制,也更具有挑战性。
高增益观测器是非线性反馈控制中常用的一种方法,它能够根据系统的输出估计系统输出的导数项,且不依赖于系统的数学模型。本文针对由非线性外系统驱动的一类具有未建模动态和未知函数的非线性系统的输出调节问题,针对状态不可测的情况,采用高增益的观测器去估计不可测的状态,并设计了具有状态观测器的非线性内模,与以往不同的是[11-12],引入动态信号去处理系统的未建模动态,设计输出反馈控制器和自适应模糊状态观测器使得对给定任意的初始状态,所得到的整个闭环系统能达到最终一致有界且跟踪误差能任意小。
1 问题描述
考虑具有如下形式的非线性系统
(1)
其中:ξ表示未建模动态;x=[x1,…,xn]T∈Rn表示系统的状态,且ξ,x2,…,xn不可测量的;u∈R表示系统的控制输入;y∈R表示系统输出,是可测量的;fi(x1,…,xi) (i=1,…,n)表示未知的光滑函数;gi(ξ,e,t)表示和动态信号有关的不确定的连续Lipscitz函数;di(w)为非期望的扰动信号,R(w)为参考输入,w∈Rq为扰动信号,由如下未知的不确定非线性系统产生的:

(2)
假设1[13]:动态不确定性gi(ξ,e,t)满足
‖gi(ξ,e,t)‖≤ai‖ξ‖2+bi‖e‖2,
其中正常数ai和bi未知。
(3)
这里α1,α2和γ为K类函数,正常数c0和d0是已知的。
2 控制器设计
2.1 非线性内模设计
为了处理系统(1)中的动态扰动和不匹配动态,引入动态信号r[13],满足
(4)

注意到未建模动态中没有出现外系统信号,因此系统(3)存在如下可定义的全局解:
(5)
定义状态变换σ=x-π(w),其π(w)= [π1(w),…,πn(w)]T。由式(1)、式(5)可得:
(6)
其中:
假设3[14]:存在已知的正常数L,满足


对非线性外部系统作如下假设:

由于α(w)为未知的前馈项,为产生前馈的估计,故需要设计内模

(7)
其中选取K∈Rr,使得F0=F-KH是Hurwitz的,同时存在PF>0, Q>0满足下列等式

(8)
PFG+JT=0。
(9)
2.2 高增益的模糊状态观测器设计
由文献[14]可知,式(1)中的非线性项可由如下的模糊逻辑系统逼近









设计高增益的状态观测器为:
(10)
其中:常量l>1是待设计的增益;ki(i=1,…,n)是使得多项式p(s)=sn+k1sn-1+…+kn-1s+kn是Hurwitz的常量。


(11)
其中:

(12)
式中


考虑到p(s)是Hurwitz的,则一定存在一个n×n对称且正定的矩阵P满足
ATP+PA=-2aI。
(13)
式中a>0为正常数。


(14)




(15)

(16)
根据不等式2m1m2和假设1,得

(17)
根据假设2和引理1,可知‖ξ‖的估计为
‖ξ‖。
(18)

(19)



(20)

(21)
其中:δ=max{δi0},i=1,…,n,max{ }表示最大值。
将式(20)~(21)代入到式(16)得
(22)
2.3 自适应模糊控制器设计与稳定性分析
现在考虑系统(1)的镇定问题。



(23)
由假设1-假设3和Young’s不等式可得
z1g1

(24)


(25)
和


(26)
注意到∀κ>0,有

(27)
选取镇定的虚拟控制与自适应律
(28)
式中c1>0,Υ1>0,R1>0均为待设计常数,θ10为变量θ1的初始值。
将式(24)-(28)代入到式(23)中,可得






(29)
现在对式(29)的右端开始估计,注意到

可以得到


(30)
由假设3,可得

(31)
和

(32)

(33)
根据式(21)和式(33) ,可得

(34)
故选择虚拟控制律和自适应控制律为
(35)
式中c2>0,Υ2>0为待设计常数,θ20为变量θ2的初始值。
把式(30)-(35)代入式(29),可得



其中Ri>0为待设计的常参数。则函数Vi关于时间t的导数为

(36)
接着对式(36)的右端进行估计,显然

其中

类似于式(31)-(35),得

(37)
和

(38)

(39)
不妨假设在第i-1步成立,并有

(40)
选择虚拟控制与参数自适应律
(41)
将式(37)~(41)代入式(36),可得

最后,定义坐标变换

(42)

进一步, 式(42)可以转化为

(43)
式中F0=(F-KH)。

则易知Vη是一个正定的径向无界的函数,且Vη对时间t求导得

(44)
利用假设4,可得
将上式代入到式(44),再利用Young’s不等式可以得到

(45)
式中aF0为正常数。


(46)
式中


考虑全局的候选Lyapunov函数为


对函数Vn关于时间t求导,可得

(47)
这里

(48)
对式(48)的右端进行估计,可得到
(49)

(50)

(51)
(52)
选择全局的模糊控制器和自适应律为
(53)
把式(22),(45),(48)~(53)代入到(47),得到

(54)
其中λmin(Q)表示矩阵Q的最小特征值。

可选取自适应律

(55)
这里Γ0>0为待设计常参量。由式(55)有下述结论成立:
(56)
将式(55)和(56)代入到式(54),可得到
(57)
式中


让


需要注意的是,对任意t≥0,有d(t)≥0,特别当t>t0+T0,有d(t)=0。故式(57)可改写为
(58)


0Vn。

3 仿真算例
考虑下列具有未建模动态的二阶非线性系统
(59)

(60)




选择如下的模糊隶属度函数:





故得模糊基函数为

令
θ=[θ1,…,θ5]T
可以构造如下的非线性内模


并设计模糊的观测器为


设计如下模糊状态控制器和自适应律




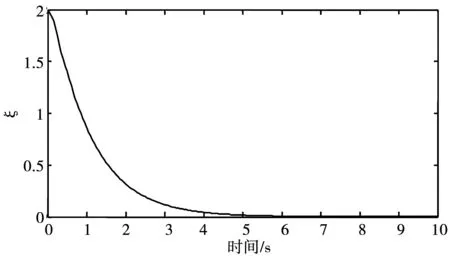
图1 未建模动态ξ Fig.1 Unmodeled dynamics ξ

图2 状态x1和参考输入w1Fig.2 State x1 and reference input w1

图3 调节误差eFig.3 Regulation error e

图4 控制输入uFig.4 Control input u

图5 自适应律Fig. 5 Adaptive law
4 结 论
本文主要考虑了一类由非线性外系统驱动的具有未知函数和未建模动态的非线性系统的输出调节问题。首先利用动态信号及相关知识处理了未建模动态,接着结合非线性外系统的信息设计出非线性内模,然后采用模糊逻辑系统来逼近系统中的非线性函数,并设计出高增益的状态观测器去估计系统中不可测的状态。最后利用Lyapunov方法、自适应理论和模糊控制理论,构造出具有模糊状态观测器的输出反馈控制器,能够使得整个闭环系统的信号都能达到最终一致有界且保证跟踪误差能渐近收敛到给定的任意小的领域内。仿真结果证明了所给出的模糊自适应控制器的设计方法是有效的。
[1] ISIDORE A,BYRNES C I. Output regulation of nonlinear systems[J].IEEE Transactions on Automatic Control, 1990,35(2):131-140.
[2] LAN W,HUANG J.Robust Output regulation for disc rete-time nonlinear systems[J]. International Journal of Control, Automation and Systems,2005,15(2):63-81.
[3] HUANG J.Asymptotic Tracking and disturbance rejection in uncertain nonlinear systems[J].IEEE Transactions on Automatic Control,1995,40(6):1118-1122.
[4] SERRANI A,ISIDORIA.Semi-grobal nonlinear output regulation with adaptive internal model[J].IEEE Transactions on Automatic Control, 2005, 53(7):1711-1717.
[5] SUN W,HUANG J. Output regulation for a glass of uncertain nonlinear systems with nonlinear exosystems and its application[J].Science in China Series F Information,2009,52:2072-2179.
[6] LIU L,HUANG J.Global robust output regulation of lower triangular systems with unknown control dire ction[J].Automatica,2008,44:1278-1284.
[7] HUANG J,CHEN Z.A general framework for tacking the output regulation problem[J]. IEEE Transactions on Automatic Control,2004,49(12):2203-2218.
[8] DING Z.Global Output regulation of uncertain nonli-near systems with exogenous signals[J]. Automatica, 2001, 37(37): 113-119.
[9] XI Z. DING Z. Global adaptive output regulationofa class of nonlinear internal models[J]. Automatica,2007,43(6):143-149.
[10] ESFSNDIAR F,KHALIL H k. Output feedback stabiliz-ation of fully linearizable systems[J]. International Journal of Control,1992,56(5):1007-1037.
[11] 孟桂芝, 马克茂. 一类不确定非线性系统的动态面输出调节方法[J]. 电机与控制学报,2011,15(5):738-741.
MENG Guizhi, MA Kemao. Dynamic surface output regulation method for a class of uncertain nonlinear systems[J].Electronic Machines and Control,2011,15(5):738-741.
[12] LIU Y,LI X.Y. Decentralized robust adaptive control of nonlinear systems withunmodeled dynamics[J].IEEE Transactions on Automatic Control,2002,47(5):848-856.
[13] JIANG Z.,PRALY L. Design of robust adaptive controllers for nonlinear systems with dynamic uncertainties[J].Automatica, 1998,34(7):825-840.
[14] TONG S,LI Y,SHI P. Observer-based adaptive fuzzybackstepping output feedback control of uncertain m-imo purefeedback nonlinear systems[J].IEEE Transactionson Fuzzy Systems,2012,20(4): 771-785.
[15] DING Z.Global Regulation of uncertain nonlinear systems with exogenous signals[J]. Automatica, 2001,37(1):113-119.
(编辑:张 楠)
Output regulation of a glass of uncertain nonlinear systems based on high-gain state observers
MENG Gui-zhi, LI Xing-hua, SONG Ying-chun
(Department of Applied Mathematics, Harbin University of Science and Technology, Harbin 150080,China)
Attitude tracking and disturbance rejection problem of a glass of nonlinear systems with unmodeled dynamics and unknown functions driven by a nonlinear exosystem with the existence of uncertain function and external disturbances is considered. Firstly output regulation problem was transformed to stabilization problem by using state variable change. Then to solve dynamic uncertainty dynamic signal was introduced, and high-gain observers were designed to estimate the unpredictable state.An adaptive nonlinear internal model was designed via exosystem information. The adaptive control theory,Backstepping design method, fuzzy control method and Lyapunov method were utilized to propose an adaptive state controls and adaptive control laws. The controls and laws were designed to achieve in attitude tracking and disturbance rejection of the closed-loop system and tracking error is asymptotically regulated to the arbitrarily small neighbourhood.At last simulation results show its effectiveness.
internal model; high-gain observers;adaptive control; Backstepping design; Lyapunov method
2016-07-20
黑龙江省教育厅科学技术研究项目(12531101)
孟桂芝(1979—),女,博士,副教授,研究方向为非线性控制理论及应用;
李兴华(1971—),女,硕士,副教授,研究方向为非线性控制理论;
孟桂芝
10.15938/j.emc.2016.10.014
TP 271
A
1007-449X(2016)10-0104-10
宋迎春(1963—),女,硕士,副教授,研究方向计算数学。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
成都信息工程大学学报(2021年6期)2021-02-12
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
工程技术研究(2020年11期)2020-07-14
电机与控制学报(2018年9期)2018-05-14
北京航空航天大学学报(2017年6期)2017-11-23
科技视界(2016年8期)2016-04-05
湖南大学学报·自然科学版(2016年2期)2016-03-15
铁道科学与工程学报(2015年5期)2015-12-24
