地铁隧道加测陀螺边最佳位置估算方案
2016-11-28 07:22张宇冉
城市勘测 2016年5期
张宇冉
(天津市勘察院,天津 300191)
地铁隧道加测陀螺边最佳位置估算方案
张宇冉*
(天津市勘察院,天津 300191)
受地铁隧道特定环境的限制,地下控制测量一般采用导线测量方式,其横向贯通误差最难控制。为了确保贯通测量的质量,可以适当加测陀螺方位,而加测陀螺方位的最佳位置就涉及设计问题。利用严密函数式可以计算导线端点的点位误差以及计算加测若干条陀螺方位的导线终点误差,进而推导出陀螺方位的最佳位置,但这种方法比较复杂,计算工作量大、且十分繁琐。利用以计算机仿真计算为主的现代控制网优化设计可以快速、有效解决上述问题。
隧道;控制测量;陀螺方位;贯通误差
1 引 言
隧道控制测量的主要工作是贯通测量,陀螺全站仪在其中发挥着不可替代的作用。陀螺全站仪是一种将陀螺仪和全站仪集成于一体的测量仪器,具有不受时间和环境制约的优点,同时能够独立测定真北方向,观测简单,定向时间短,效率高,而且能保证较高的定向精度[1,3]。由于陀螺仪属于精密仪器,频繁使用会对仪器产生不必要的耗损[4]。对加测陀螺方位的隧道控制测量方案进行优化设计,不但可以减少仪器成本,而且可以提高贯通精度[2]。本文基于模拟仿真计算,对加测若干条不同位置陀螺边的导线精度进行精度估计。
2 设计原理
将陀螺边设置在导线的第1、2、3…、n条边上,共有n种位置组合方式,经严密平差处理,分别计算出加测陀螺边后的导线终点的点位误差,取点位误差最小的陀螺边位置作为设置一条陀螺边最佳位置的结果。

3 算例分析
为仿真测试地下导线加测陀螺边的最佳位置,选取直线和曲线总转角为60°、120°的等边等角导线(如图1所示),模拟地下导线。

图1 曲导线示意图
取导线边距离150m;为使结果更精确,取40个导线角,同时有40条导线边。取一般地铁地下精密导线测量精度参数,即方向观测中误差m=1.8″(测角精度2.5″),测距精度 2 mm+2 ppm。陀螺边精度为4″,作为带误差的观测值参与平差。导线平差处理后,使用先验精度评定导线点的点位误差[1]。在不顾及其他因素的情况下,加测陀螺边后使得导线终点在贯通面上的横向误差My最小的陀螺边位置为最佳位置。通过设计软件(如图2所示),排列组合陀螺边在全导线中的位置,计算出导线终点的点位误差。
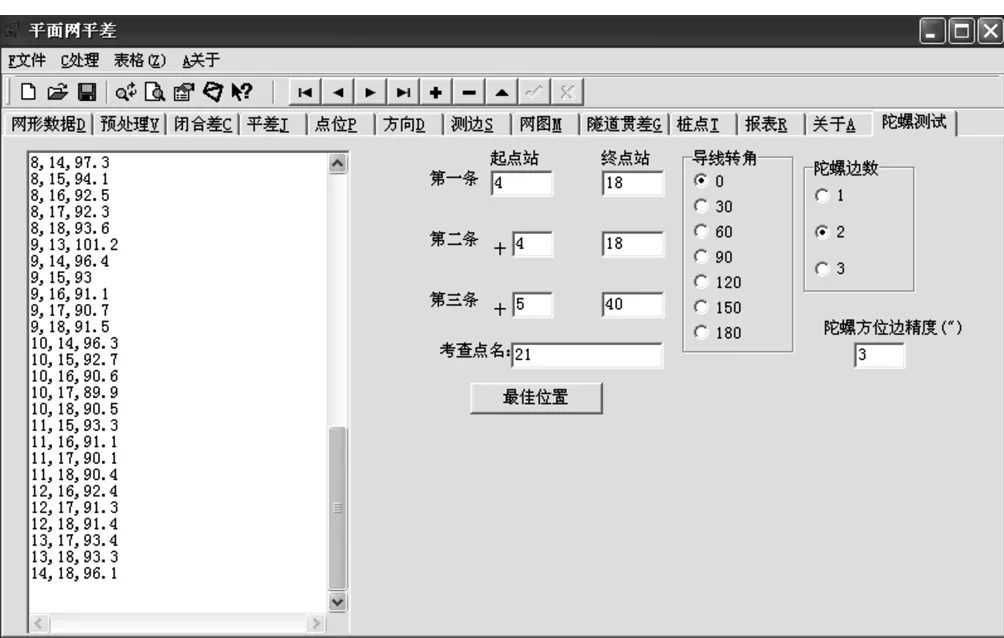
图2 模拟软件界面
计算结果如表1、表2、图3所示:

加测若干陀螺边后导线终点误差 表1

图3 加测若干陀螺边后导线终点误差

加测若干条陀螺边最佳位置组合 表2
4 结 论
(1)在导线理论最佳位置加测1条陀螺边后,导线终点的点位横向误差可降低约57%~64%,加测2条则可降低达70%~75%,加测3条则可降低达75%~80%。
(2)理论上,为使平差后导线端点横向误差最小,加测1条陀螺边的最佳位置在整个导线长度的约70%~83%处;加测2条陀螺边的最佳位置分别在导线的45%~65%和83%~90%处;加测3条陀螺边时,三条陀螺边的最佳位置为:第一条位于整个导线的35%~60%处,第二条位于63%~78%处,第三条位于88%~93%处。
(3)高精度导线测量中,陀螺方位也含有误差,控制网数据处理时宜作为观测值参与平差。
(4)实际上,地下导线加测陀螺边的最佳位置,需要合理搭配导线测角精度和陀螺方位测量精度,测角精度越高,陀螺方位的精度越高,越满足平差处理后导线终点的横向在允许范围内等要求。对于城市地铁的地下导线,可加测精度为3″~4″的陀螺边,只加测一条情况下,位置大致可选在整个地下导线的0.7倍处。
[1] 张正禄. 工程测量学[M]. 湖北武汉:武汉大学出版社,2013.
[2] 张正禄,张松林,伍志刚等. 20-50km超长隧道(洞)横向贯通误差允许值研究[J]. 测绘学报,2004(1):83~88.
[3] 郑文华,魏蜂远,古长东等. 地下工程测量[M]. 北京市朝阳区:煤炭工业出版社,2007.
[4] 黎明. 陀螺全站仪性能及定向应用研究[D]. 河南郑州:解放军信息工程大学,2008.
[5] 王卫. GAT陀螺全站仪误差分析与贯通测量模拟系统设计研究[D]. 西安:长安大学,2011.
[6] 龚云,杨志强,石震. GAT磁悬浮陀螺全站仪在矿山测量中的应用[J]. 测绘科学,2012,37:185~187.
[7] 石震,杨志强,田永瑞等. 基于高精度基准数据网的陀螺全站仪寻北精度及稳定性评价方法[J]. 测绘通报,2012(1):91~95.
[8] 于力. 矿山测量中贯通位置的选择影响贯通误差的分析[J]. 黑龙江科技信息,2011(30):8~10.
[9] 杜宁,王莉. 导线测量对贯通影响的误差预计新公式[J]. 矿山测量,1999(4):5~8.
[10] 魏成,花向红,唐琨等. 地下导线测量对隧道横向贯通误差影响研究[J]. 测绘地理信息,2013(1):12~14.
[11] Zhang Zhenglu,Zhang,Songlin,Zhang Jun. Research on the especially high accuracy construction network of hydropower stations[J].Dam and Safety,2000(5):13~15.
Optimal Position Estimation Scheme for the Gyro Measurement of the Subway Tunnel
Zhang Yuran
(Tianjin Institute of Geotech Investigation & Surveying,Tianjin 300191,China)
Restricted subway tunnel specific environment,Control measurements are generally only use underground wire measurement,laterally through are the most difficult to control. To ensure the quality through measurement can be appropriately GYRO orientation,The best place to GYRO orientation involves design problems. The point position error of the traverse point can be calculated by using the close function formula,and the end point error of the Gyro traverse is calculated and measured,Then the optimal position of gyro azimuth is derived,But this method is more complicated,and the calculation is very heavy and complicated. The optimization design of the modern control network based on the computer simulation can solve the above problems quickly and effectively.
subway tunnel;control measure;azimuth;through error
1672-8262(2016)05-145-03
P258
B
2016—04—05
张宇冉(1991—),男,助理工程师,主要从事城市勘测技术工作。
猜你喜欢
矿产勘查(2020年1期)2020-12-28
航天制造技术(2020年4期)2020-09-11
水电站设计(2020年4期)2020-07-16
小学生学习指导(低年级)(2019年10期)2019-10-16
工程与建设(2019年3期)2019-10-10
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
快乐语文(2018年36期)2018-03-12