主动悬架非线性滑模容错控制研究
2016-12-13 06:54刘树博周焕银罗先喜邓文娟
东华理工大学学报(自然科学版) 2016年3期
刘树博, 周焕银, 罗先喜, 邓文娟, 余 颖
(东华理工大学 江西省新能源工艺及装备工程技术研究中心,江西 南昌 330013)
主动悬架非线性滑模容错控制研究
刘树博, 周焕银, 罗先喜, 邓文娟, 余 颖
(东华理工大学 江西省新能源工艺及装备工程技术研究中心,江西 南昌 330013)
以1/4车非线性主动悬架模型为研究对象,针对未知的作动器故障,提出了一种滑模容错控制方法。选取合适的滑模面,以保证悬架系统的隔振性能。在无需掌握系统的非线性及作动器故障信息的前提下,基于Lyapunov稳定性理论设计滑模容错控制律,使其切换增益能实现自适应调节以消除故障影响。最后,通过理论推导证明了该控制律能够满足悬架系统的硬约束要求。仿真结果表明,基于容错控制律设计得到的主动悬架系统,在作动器出现故障的情况下,有效改善车辆乘坐舒适性,体现出了较好的容错性。
非线性主动悬架;滑模容错控制;自适应调节
刘树博,周焕银,罗先喜,等.2016.主动悬架非线性滑模容错控制研究[J].东华理工大学学报:自然科学版,39(3):293-297.
Liu Shu-bo, Zhou Huan-yin, Luo Xian-xi,et al.2016. Nonlinear sliding fault control for active suspension[J].Journal of East China University of Technology (Natural Science), 39(3):293-297.
悬架是车轮与车辆承载系统之间的弹性连接装置的统称,是现代车辆重要组成部分之一。与传统的被动悬架相比,主动悬架能够及时主动地产生和调整所需的控制力,改善汽车行驶平顺性,已经成为研究的热点之一(孙涛等,2007;Gao et al.,2006; Li et al.,2004)。在实际的工作过程中,主动悬架作动器难免出现故障,使其主动力输出不能够达到理想的数值,导致悬架系统性能下降甚至出现不稳定的情况。到目前为止,大部分主动悬架控制策略的研究是在假定作动器完好的条件下进行的,而关于主动悬架容错控制研究的报道却相对较少。
Chamseddine 等(2006a,2006b,2008)针对传感器故障采用了悬架容错控制,并取得了一定的研究成果。Péter等(2008)通过制动控制策略调整来应对作动器完全损坏故障,以提升主动悬架控制效果。杨柳青等(2012,2013)利用主动悬架二自由度线性模型对鲁棒容错控制策略进行了研究,结果表明,容错控制主动悬架具有较强的鲁棒性,并对作动器故障具有很好的被动容错控制品质,提高了主动悬架系统控制可靠性。
然而,目前国内外学者对主动悬架容错控制的研究主要是基于线性模型进行的,忽略了元件非线性特性对系统带来的不利影响。实际上,主动悬架弹簧和减振器具有一定的非线性特性,且其具体表达形式无法预知,因此主动悬架是一个典型的非线性系统。如果对该模型进行简单的线性化处理,会大大降低模型的精确性,影响控制策略的有效性及实用性。因此,只有以非线性模型作为研究基础,设计主动悬架容错控制律,在实际应用中才具有重要的意义。
滑模控制也称变结构控制,是一类特殊的非线性控制,对模型参数的不确定性和外界扰动具有高度的鲁棒性(Ouyang et al.,2014),对非线性系统的控制具有良好的控制效果。本文选取1/4汽车非线性模型作为研究对象,提出了一种主动悬架滑模容错控制策略,其特点如下:① 基于Lyapunov稳定性理论设计自适应调节律,使切换增益能够实现调节,避免了依赖不确定信息上界而带来的设计保守性(马静等,2013);② 本文设计的滑模控制律需要的反馈信号少,与已有的悬架滑模控制报道相比(Sam et al.,2004;姚嘉凌等,2008;Nurkan et al.,2008),实用性更强。本文在进行了具体的理论推导后,针对不同作动器故障的情况进行仿真与分析,对所提出方法的可行性与有效性进行验证。
1 1/4车非线性主动悬架故障模型
主动悬架1/4 车模型如图1所示。根据牛顿第二定律,主动悬架非线性动力学方程表示为:
(1)
(2)
式中,ms和mu分别表示悬挂质量和非悬挂质量;Fd和Fs分别代表非线性弹簧和阻尼器产生的力,Ft和Fb分别代表线性轮胎弹性力及阻尼力;zs为车身垂直位移;zu为轮胎垂直位移;zr为路面输入位移;u为作动器理想的主动力输出,uf为作动器故障输出。
悬架系统中轮胎的线性轮胎弹性力及阻尼力Ft和Fb的具体表达式如下:
(3)
考虑主动悬架作动器发生增益变化故障,其故障输出为uf=δu,δ∈(0,1]。其中,0<δ<1表示作动器发生增益变化故障,δ=1时表示作动器正常工作。
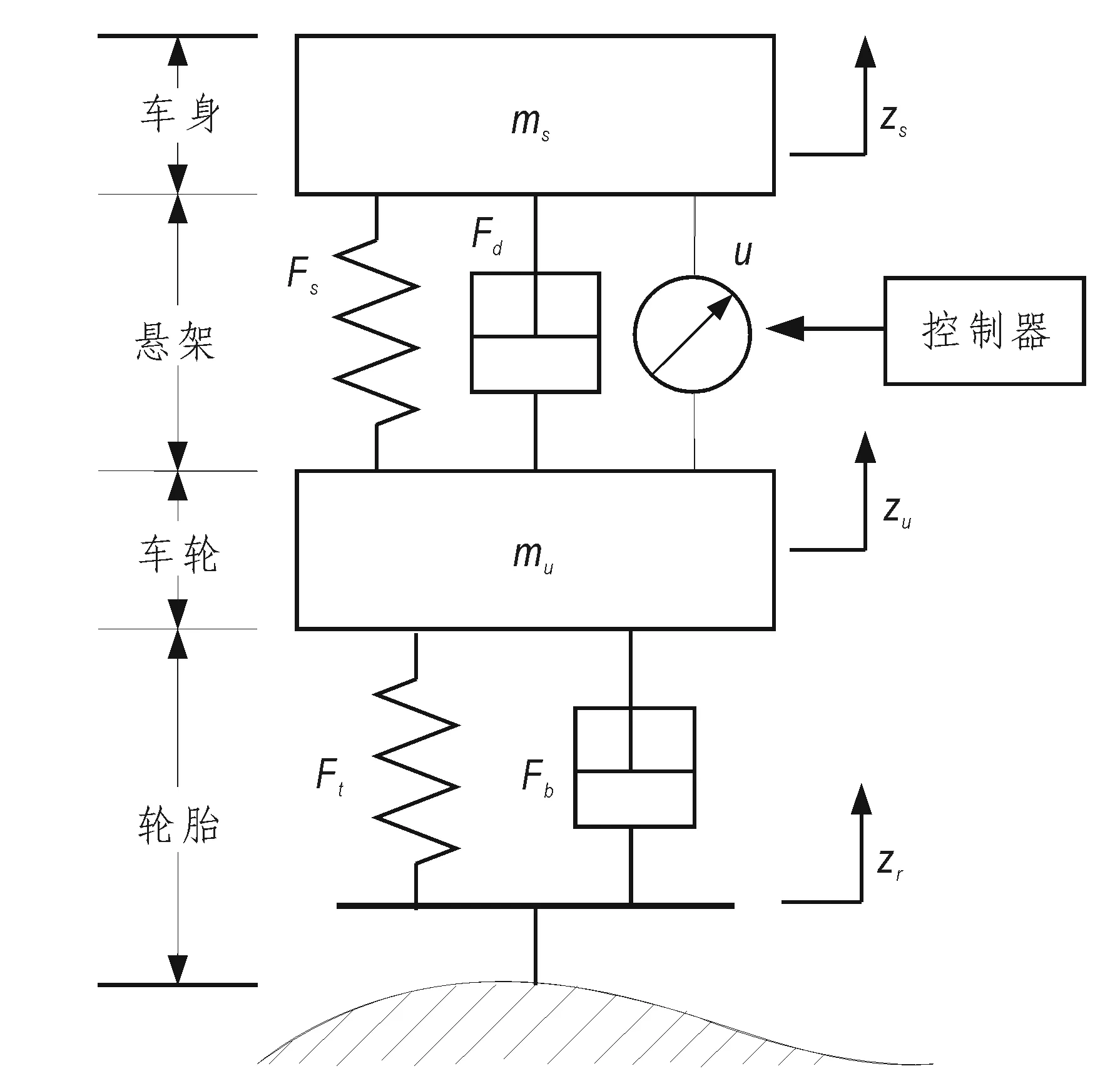
图1 1/4车主动悬架结构图Fig.1 A quarter-car active suspension model
2 滑模容错控制律设计
依据悬架动力学方程(1),定义控制系统的误差变量如下:
(4)

主动悬架理想的控制目标是使车辆在颠簸路面上行驶时,车身尽可能地不产生振动,从而体现出良好的隔振性能,此时r1=r2=0。对误差方程(4)求导,并结合动力学方程(1),可得误差动力学方程如下:
(5)


由于矩阵B大小不确定,因此将其分解为确定矩阵B0与不确定矩阵ΔB之和的形式:
此时式(5)可改写为:
(6)

由于悬架阻尼器、弹簧及作动器输出能量有限,因此非线性扰动向量d范数有界,即‖d‖≤L。其中,L是未知正常数;||·||表示向量的2范数。
2.1 滑模切换面的选取
在本研究中,选取滑模切换面满足如下方程:
s=ke1+e2=Ge
(7)
式中,s∈R1×1,k>0,G=[k 1]∈R1×2。
对滑模切换面(7)求导,可得
(8)
2.2 滑模容错控制律设计
定理1 对于非线性主动悬架模型(1)及误差动力学方程(5),选取滑模容错控制律如下
u=-(GB0)-1GAe-(GB0)-1ρsgn(s)
(9)

(10)

证明:
选取Lyapunov函数
(11)
对上式求导,可得V的导数为:
α-1T(-α|s|)-α-1ρ(-α|s|)≤
-ρ|s|+T|s|-T|s|+ρ|s|≤0
综上所述,系统在Lyapunov意义下是渐近稳定的,这表明了在滑模容错控制(9)和自适应律(10)的作用下,系统能够在有限时间内到达滑模面s=0。
2.3 系统约束条件分析
依据主动悬架的乘坐舒适性要求,设计了滑模容错控制律(9)和(10)。下面基于容错控制律,对主动悬架的操纵稳定性和机械约束进行分析。
由于非线性弹簧力及阻尼力Fs和Fd大小未知,因此为了便于系统性能分析,对其进行以下分解:
(12)
式中,Δ1和Δ2为有界的非线性建模误差。
将容错控制律(9)代入系统动力学方程(2),可得:
(13)
式中,Δ=Δ1+Δ2。


(14)

式中,θ1=-kms,θ2=-ms。
定义一个正定函数V=xTPx,其中P>0是一个正定矩阵,对其求导可得
在式(14)中矩阵A的特征值具有负实部,因此存在正定实对称矩阵Q,使得ATP+PA=-Q成立。



-αV+β
(15)

通过求解微分方程不等式(15),可得

进而得:





选取适当的参数η和矩阵P,使以下不等式成立,以保证主动悬架的操纵稳定性。
(16)
此外,分析可得,
|zs-zu|<|zs|+|zu|<
通过调节矩阵P的大小,可以使成立|zs-zu|
≤zmax,从而使悬架的机械约束得到保证。
总之,由动力学方程(1)设计得到的滑模容错控制律能够满足在悬架系统纵稳定性和机械约束要求。证毕。
3 仿真与分析
假定主动悬架的非线性部分表达形式如下(Deshpancle et al.,2004):
(17)
式中,k1s和k2s分别为悬架弹簧的线性与非线性刚度;c1s和c2s分别为悬架阻尼器的线性与非线性阻尼系数;kt和ct分别为轮胎刚度和阻尼系数。车辆具体参数及取值参见表1,其中zmax为悬架最大动行程。

表1 1/4车参数表

图2 悬架输出响应曲线Fig.2 Responses of suspension system
选取具有代表性的单一包块路面和连续包块路面作为悬架扰动输入,并考虑以下两种不同的情况进行仿真。仿真中选取滑模面系数向量G=[79 1]。为了说明滑模容错控制主动悬架(SFMC)的效果,图2同时给出了被动悬架(PS)的仿真结果作为对比。不确定参数的取值情况如下:
情况1:作动器无故障,系统参数无摄动;
情况2:作动器故障系数δ=0.5,悬挂质量摄动-20%,线性阻尼系数摄动+20%;线性轮胎刚度摄动-30%。
3.1 单一包块路面分析
假定包块路面的具体表达形式如下:
式中,Am为包块高度(取值0.1 m),L为包块长度(取值5 m),v为车辆行驶速度(取值45 km/h)。
由图2可以看出, 在任意一种情况下,SFMC主动悬架的加速度输出幅值明显减小,且调节时间短;主动悬架动行程与动静载荷比都没有超过其最大约束限制,满足悬架性能的评价指标;与被动悬架相比,SFMC主动悬架的车身位移能够更好地跟随路面输入位移的变化,且上下振荡的幅度较小,体现出了良好的隔振性能。
综上所述,SFMC主动悬架系统能够抑制不确定性及作动器故障给系统带来的不利影响,极大地改善了乘坐舒适性。
3.2 连续包块路面分析
假定该路面的位移与时间表达式如下:
zr=0.08cos(2πt) sin(0.6πt)
表2给出了悬架加速度输出的最大值amax、最小值amin和均方根值arms。由表2可见,在不同情况下,SFMC主动悬架的加速度输出都明显优于被动悬架,体现出了良好的容错性及鲁棒性。
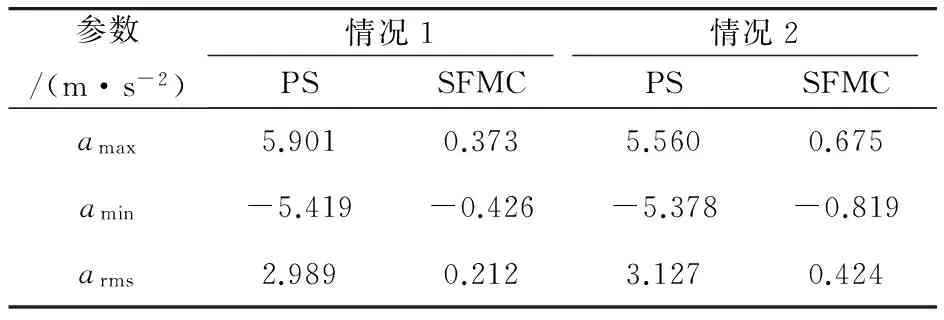
表2 悬架加速度输出表
4 结论
(1)以1/4汽车非线性主动悬架为研究对象,针对悬架作动器的故障问题,对主动悬架滑模容错控制策略进行研究,基于Lyapunov稳定性理论设计了自适应滑模容错控制律。
(2)本文选取简单可测的车身位移及其速度作为反馈信号,无需掌握系统故障信息及非线性特性。设计得到的滑模容错控制律能够满足在改善乘坐舒适性的同时,满足系统纵稳定性和机械约束要求。简而言之,该控制策略结构简单,利用的信息量少,易于实现,因此具有一定的工程应用前景。
(3)仿真结果表明,尽管受到执行器故障的影响,主动悬架依然具有良好的减振性能,体现出了良好的容错性,验证了文中新型算法的有效性。
马静,郭锐,王玉慧,等. 2013. 基于积分滑模控制的广域阻尼鲁棒控制策略[J]. 电网技术, 37(2):362-365.
孙涛,喻凡,张振东.2007.重载车辆油气悬架不确定分析及H∞控制器设计[J].振动与冲击, 26(9):51-54.
杨柳青,陈无畏,汪洪波. 2012.基于H2/H∞控制的汽车主动悬架最优鲁棒容错控制[J]. 中国机械工程,23(24):3013-3019.
杨柳青,陈无畏. 2013.基于传感器信号重构的汽车主动悬架主动容错控制[J].汽车工程,35(12):1084-1091.
姚嘉凌,郑加强,蔡伟义. 2008.车辆半主动悬架模型参考滑模控制[J]. 农业机械学报, 39(4):5-8.
Chamseddine A, Hassan N, Ouladsine M.2006a.Sensor fault detection, identification and fault tolerant control: application to active suspension[C]//Proceedings of the 2006 American Control Conference Minneapolis, Minnesota, USA: 2351-2356.
Chamseddine A, Noura H, Raharijaona T. 2006b.Full vehicle active suspension: Sensor fault diagnosis and fault tolerance[C]// Fault Detection, Supervision and Safety of Technical Processes Beijing, P.R. China,:468-473.
Chamseddine A, Noura H.2008.Control and Sensor Fault Tolerance of Vehicle Active Suspension [J]. IEEE Transactions on Control Systems Technology, 16(3):416-433.
Deshpande V S, Mohan B, Shengde P D, et al. 2014. Disturbance observer based sliding mode control of active suspension systems [J].Journal of Sound and Vibration, 333(11):2281-2296.
Gao H J, Lam J, Wang C H. 2006. Multi-objective control of vehicle active suspension systems via load-dependent controllers [J]. Journal of Sound and Vibration, 290(3-5):654-675.
Li P S, Lam J, Cheung K C. 2014. Multi-objective control for active vehicle suspension with wheelbase preview [J]. Journal of Sound and Vibration, 333 (21):5269-5282.
Nurkan Y, Yuksel H. 2008.Backstepping control of a vehicle with active suspensions [J]. Control Engineering Practice, 16(12):1457-1467.
Ouyang P R, Acpb J, Pano V.2014.PD with sliding mode control for trajectory tracking of robotic system [J]. Robotics and Computer-Integrated Manufacturing, 30(2):189-200.
Péter G, Zoltán S, József B. 2008.Design of reconfigurable and fault-tolerant suspension systems based on LPV methods[C]//Proceedings of the 47th IEEE Conference on Decision and Control, Cancun, Mexico: 5384-5389.
Sam Y M, Osman J S, Ghani M A. 2004.A class of proportional-integral sliding mode control with application to active suspension system [J]. Systems & Control Letters, 51(3-4):217-223.
Nonlinear Sliding Fault Control for Active Suspension
LIU Shu-bo, ZHOU Huan-yin, LUO Xian-xi, DENG Wen-juan, YU Ying
(Jiangxi Province Engineering Research Center of New Energy Technology and Equipment, East China University of Technology, Nanchang,JX 330013, China)
To deal with the unknown actuator faults, a sliding fault tolerant control (SFTC) method is proposed based on the nonlinear quarter-car model of active suspension. An appropriate sliding surface is selected to guarantee the performance of vibration isolation. Moreover, without requiring the information of the system nonlinearity and actuator fault, the sliding fault tolerant control law is designed to eliminate the adverse effects of actuator fault by adjusting the switching gain adaptively based on Lyapunov stability theory. Finally, simulation results show that the SFTC-based active suspension subject to actuator fault can improve the vehicle ride comfort and demonstrate good fault tolerance.
nonlinear active suspension; sliding fault tolerant control; adaptive adjustment
2015-10-26
国家自然科学基金(51409047,61463003);博士科研启动基金项目(DHBK1015);江西省新能源工艺及装备工程技术中心开放基金项目(JXNE2015-10)
刘树博(1981—),讲师,博士,主要研究方向为机电控制。E-mail:sbliu@ecit.cn
10.3969/j.issn.1674-3504.2016.03.015
TP273
A
1674-3504(2016)03-0293-05
猜你喜欢
昆明医科大学学报(2022年2期)2022-03-29
现代临床医学(2021年6期)2021-11-20
制造业自动化(2019年9期)2019-09-27
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
西安航空学院学报(2017年3期)2017-07-05
北京航空航天大学学报(2016年2期)2016-12-01
北京航空航天大学学报(2016年7期)2016-11-16
海南医学(2016年8期)2016-06-08
北京航空航天大学学报(2016年4期)2016-02-27