
电流非线性补偿的开关磁阻电动机转矩分配函数控制
2016-12-20 05:18党选举周子文张广谱
微特电机 2016年9期
党选举,周子文,张广谱
(桂林电子科技大学,桂林 541004)
电流非线性补偿的开关磁阻电动机转矩分配函数控制
党选举,周子文,张广谱
(桂林电子科技大学,桂林 541004)
针对开关磁阻电动机转矩分配函数控制因采用线性电感模型得到的电流值无法满足转矩-电流非线性关系而造成转矩脉动较大的问题,提出电流非线性补偿的控制策略,在转矩分配函数控制基础上引入瞬时转矩反馈,采用泰勒多项式将转矩偏差经非线性计算环节折算成电流偏差,并将电流偏差叠加到主通路电流上以补偿电流非线性部分,间接补偿转矩非线性特性,实现电机恒转矩控制。仿真结果表明,在补偿优化后的电流控制下,输出转矩快速收敛至给定转矩,转矩脉动明显减小。
开关磁阻电机;转矩分配函数;泰勒多项式;非线性电流
0 引 言
开关磁阻电动机(Switched Reluctance Motor, SRM)相较于其它类型电机,具有结构简单坚固、无需永磁材料、高转速运行可靠及调速范围宽等优点,逐渐成为驱动调速领域的研究热点。但是,SRM固有的双凸极结构、高度非线性的电磁特性及开关供电特性所导致的转矩脉动缺陷,限制了其在新能源汽车驱动及高精度伺服控制等领域的广泛应用[1]。而传统的电机线性控制方法又难以满足非线性强且数学模型未知的SRM控制要求,因此研究抑制SRM转矩脉动的非线性控制方法意义重大。
国内外对抑制SRM转矩脉动的研究主要集中在电机本体结构优化及电机控制策略改进两方面[2-3]。转矩控制策略大致分为两大类:一类是控制变量为电流或磁链的间接转矩控制;另一类是控制变量为瞬时合成转矩的直接转矩控制。本文采用控制变量为电流的间接转矩控制。
文献[4-8]均是在转矩分配函数(Torque Sharing Function, TSF)基础上展开研究,证明TSF对减轻SRM转矩脉动有良好的控制效果。文献[5]考虑到SRM的强非线性,固定形状的TSF无法保证换相期间脉动抑制的效果,引入估算转矩反馈,在线优化分配策略。文献[6]为解决关断相电流未能及时减为0,而在负电感变化率区间产生负转矩的问题,采用模糊逻辑控制(FLC)在线修改TSF,补偿开通相期望转矩以抵消拖尾电流的影响,减小了转矩脉动;以转矩偏差及其变化率作为FLC的输入,输出为分配函数的补偿量。文献[7]考虑了电机磁场的非线性及高度磁饱和性,通过优化换相期间开通相与关断相电流曲线以抑制脉动。文献[8]是直接转矩控制,转矩偏差经过空间迭代学习生成电压修正值,在几个迭代周期后转矩能明显收敛至期望值。文献[5-8]共同点是通过补偿或优化各控制量非线性特性以减小转矩脉动。文献[9]在测得电机静态矩角特性基础上,根据转矩偏差计算出电流偏差以优化查表得到的电流;电流偏差与转矩偏差比值等于上一周期同位置角处电流与转矩比值。
该文充分考虑到转矩-电流之间的强非线性关系,提出电流偏差补偿计算方法。采用泰勒多项式进行转矩偏差到电流偏差的折算,折算过程体现了转矩-电流非线性关系,因此对电流的非线性补偿实现了SRM的非线性控制并达到了良好的控制效果。
1 电磁转矩模型
SRM各相电感随转子位置角及相电流变化而变化,是造成转矩-电流非线性的重要原因。 难以解析,常根据电机的结构及所需的控制精度做适当简化。不考虑磁饱和及边缘效应时,相电感与电流无关而只是角度的函数,基于线性电感模型(Linear Inductance Model, LIM)的电磁转矩数学表达式[10]:
(1)
线性电感模型(LIM)将转矩简化为随电流平方变化的量。由于实际电感非线性变化,恒定电流不对应恒定转矩,要输出恒定转矩必须输入变化的非线性电流(如图1所示)。非线性很强的电流可被分解为恒定电流与非线性电流的叠加,以降低获取的难度;式(1)的逆函数能得到前者,后者可由转矩偏差计算得到。

图1 理想相电感及相电流
2 改进基本TSF控制
2.1 基本TSF控制
采用最优TSF将期望总转矩分成导通相与关断相参考转矩,使得合成转矩恒定以减小换相时转矩脉动。基本TSF控制系统,包括转矩分配、转矩-电流计算及电流滞环控制器三个主要部分。
考察不同分配函数在换相重合区域的曲线形状,常分为线性、正弦、指数及立方函数。文献[11]综合比较了这4类函数的控制效果、损耗及运算量等指标后得出采用立方分配函数最佳的结论,本文也采用此函数(如图2所示)。
立方分配函数表达式:
(2)
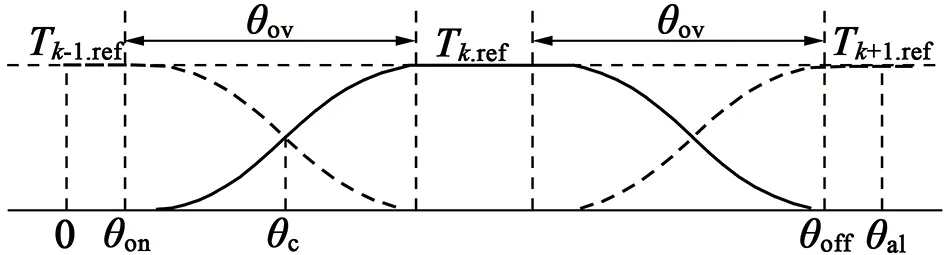
图2 转矩立方分配示意图
转矩-电流计算是对控制效果影响最大的环节。采用查表法、有限元分析等虽能较精确地得到静态矩角特性,但在实际应用时受到诸多限制[12];采用基于线性电感模型的转矩-电流逆函数式(3)在不考虑磁饱和及边缘效应前提下能快速地计算出第k相参考电流值:
(3)
本文采用分区细化的电流滞环控制以保证实际电流的跟踪能力。另外,以上两部分也可以用转矩-磁链换算及磁链控制器代替。
2.2 转矩偏差到电流偏差的折算分析及电流非线性补偿
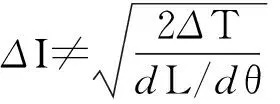
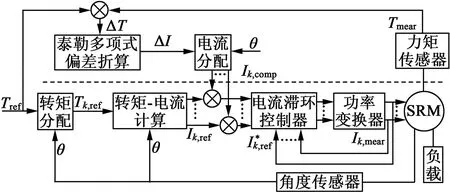
图3 基于泰勒级数展开补偿电流非线性的开关磁阻电机TSF控制框图
图4 转矩偏差对应电流偏差示意图
泰勒定理:对于正整数n,若函数f(x)在闭区间[a,b]上n阶连续可导,且在开区间(a,b)上n+1阶可导,则对任意x0∈[a,b]有下式成立:

(4)
式(4)中:多项式称为函数f(x)在点x0处的泰勒展开式;f(n)(x0)是f(x)在点x0处的n阶导数;Rn(x)是泰勒公式的余项,是(x-x0)n的高阶无穷小。式(4)可近似整理成:
Δy=F(Δx)=f′(x0)Δx+
(5)
式(5)可理解为:非线性函数f(x)在点x0处各阶导数值已知情况下,用这些导数值做系数构建一个多项式近似描述这一点邻域中Δx=x-x0与Δy=f(x)-f(x0)的关系。
取T0为设定恒转矩,T为测量反馈转矩,ΔT=T-T0,ΔI=g(T)-g(T0),dL/dθ=k为常值,式(3)可写成:
(6)
函数g(T)在实数域内任意阶可导,显然满足泰勒定理条件,结合式(5)~式(6)可将ΔI与ΔT关系近似表达:
ΔI=G(ΔT)=g′(T0)ΔT+
(7)
式中:

(8)
主辅通路电流叠加得最终参考电流I*为:
I*=I+ΔI=
(9)
分析式(7)可知,电流偏差ΔI=G(ΔT)并非只与转矩偏差一次方有关,还与偏差的二次、三次及高次方有关;偏差的折算体现了转矩-电流非线性,对于线性关系只有等式右边第一项。式(8)为函数g(T)在设定转矩T0处1~4阶导数,ΔT是测量反馈转矩相对设定恒转矩T0的偏差。式(9)等号右侧第一项为恒定电流,在其上补偿非线性修正项以得到反映电机非线性的控制电流。k值在小范围内变化,取值对控制效果影响较小,可根据仿真实验结果选取适当的值。
3 仿真验证与分析
为了验证本文提出的控制策略对SRM非线性的控制能力,在MATLAB/Simulink环境下进行仿真控制研究,电机模型选用Simulink模型库中三相12/8极结构的SRM非线性模型[13]。
衡量SRM转矩脉动大小的转矩脉动系数KT定义[15]:
(10)
式(10)中:Tmax,Tmin,Tav分别表示电机稳态运行时的最大瞬时转矩,最小瞬时转矩及平均电磁转矩。转矩脉动系数的计算用MATLAB编写的程序实现;程序选取稳态运行时转矩数据,判别以上三值并代入式(10)计算出KT。
设定恒转矩T0=5 N·m,k=0.2。图5为本文提出的基于泰勒多项式非线性电流补偿的开关磁阻电机TSF恒转矩控制仿真转矩波形。 观察波形可知,输出转矩快速收敛至期望转矩,且稳态运行时转矩偏差值小,经式(10)计算转矩脉动系数KT为2.78%。为验证本算法有效性,与未改进前的基本TSF控制及闭环TSF控制进行对比仿真实验。闭环TSF控制中参考电流:

图5 非线性电流补偿的TSF恒转矩控制转矩仿真波形
(11)
基本TSF控制仿真转矩波形如图6所示,实际输出转矩在设定转矩5 N·m上下波动剧烈,经计算转矩脉动系数为45.51%。闭环TSF控制仿真转矩波形如图7所示,相较基本TSF控制由于引入转矩闭环输出转矩已得到大幅改善,但电流偏差的计算未能反映电机非线性特性因此相较本文所提方法控制效果仍有差距,具体数据如表1所示。仿真结果对比可知,本文提出的基于泰勒多项式非线性电流补偿的开关磁阻电机TSF恒转矩控制可有效抑制电机转矩脉动。

图6基本TSF控制转矩波形图7闭环TSF控制转矩波形
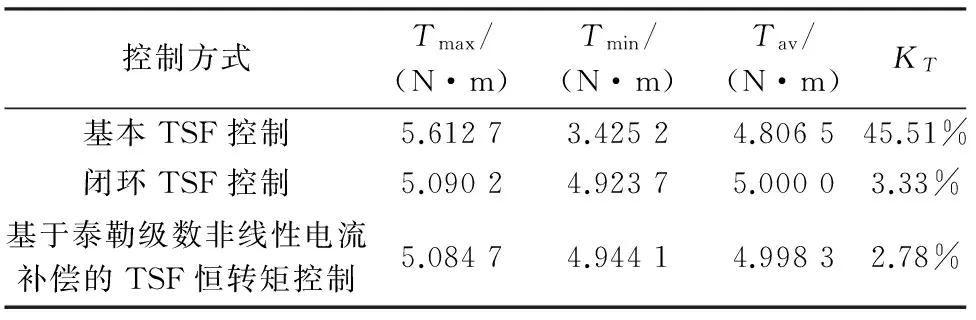
表1 转矩脉动系数KT对比
图8(a)为转矩偏差ΔT经式(7)计算出的总补偿电流ΔI;图8(b)为借鉴转矩函数分配法用电流分配函数法(Current Sharing Function, CSF)将ΔI细分成各相绕组补偿电流Icomp,Icomp叠加到主通路采用线性电感模型所得电流I上,得到某相最终参考电流Id。对比图中补偿前电流I和补偿后电流Id曲线可知,补偿后的参考电流具有SRM非线性特性,可实现电机恒转矩控制。图8(c)所示为某相实际电流及电流跟踪偏差。
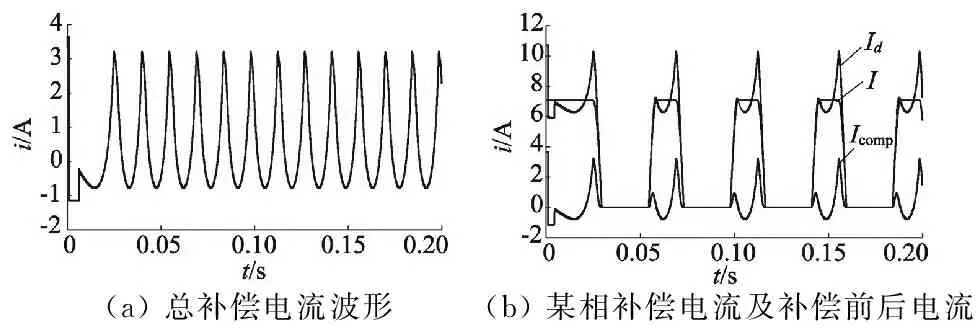
(a)总补偿电流波形(b)某相补偿电流及补偿前后电流
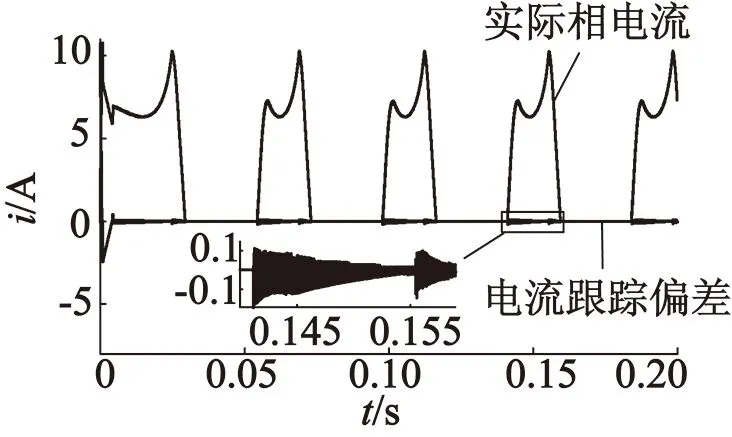
(c) 某相实际电流及电流跟踪偏差
图9为给定转矩阶跃变化时转矩响应波形曲线,0.15 s及0.25 s时设定转矩分别由5 N·m升至6 N·m,6 N·m降为4 N·m。输出转矩按照设计的控制策略快速地跟踪给定值,所设计系统动态响应快、超调量小。
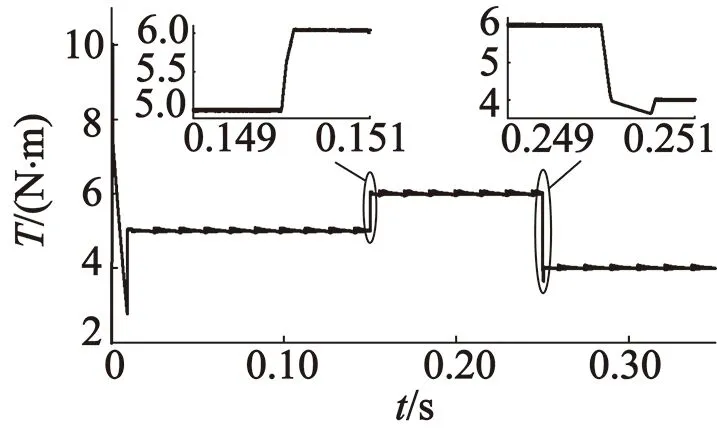
图9 设定转矩阶跃变化时响应曲线
4 结 语
为解决开关磁阻电机转矩脉动大的问题,本文在基本TSF控制基础上引入瞬时转矩反馈及电流补偿,针对SRM非线性特点,提出了一种基于泰勒多项式非线性电流补偿的转矩脉动抑制方法。该方法核心是根据转矩偏差在线求得电流偏差,实时优化各相参考电流以获取能反映SRM非线性的控制电流,间接实现SRM恒转矩控制。仿真结果表明该控制策略能实现开关磁阻电机恒转矩控制并具有转矩快速响应特性。本文所提出的控制方法具有结构简单、易于实现等优点,在转速控制应用中可作为转矩内环,因此可将该方法推广至转速控制应用中。实验平台选用量程为0~20N·m,精度为0.3% F·S的转矩传感器;若所需精度的转矩传感器难以获得,可通过电机电流和转子位置信息间接在线估算获得[15]。为使结果准确可信,将在实验平台修缮后补充实验。
[1] 梁涛年,李勇,赵崇晖.开关磁阻电机控制策略综述[J].微特电机,2014,42(12):77-81.
[2] ANDRADA P, BLANQUE B,MARTINEZ E,et al.A novel type of hybrid reluctance motor drive[J].IEEE Transactions on Industrial Electronics,2014,61(8):4337-4345.
[3] RUBA M,CHINDRIS V,FODOREAN D.Design and experimental validation of a low voltage high current SRM for light electric vehicles [C]//International Symposium on Power Electronics,Electrical Drives,Automation and Motion(SPEEDAM).IEEE,2014:118-123.
[4] YE J,BILGIN B,EMADI A.An offline torque sharing function for torque ripple reduction in switched reluctance motor drives[J].IEEE Transactions on Energy Conversion,2015,30(2):726-735.
[5] LEE D H,LIANG J,LEE Z G,et al.A simple nonlinear logical torque sharing function for low-torque ripple SR drive[J].IEEE Transactions on Industrial Electronics,2009,56(8):3021-3028.
[6] RO H S,LEE K G,LEE J S,et al.Torque ripple minimization scheme using torque sharing function based fuzzy logic control for a switched reluctance motor[J].Journal of Electrical Engineering & Technology,2015,10(1):118-127.
[7] DOWLATSHAHI M,SAGHAIAN-NEJAD S M,MOALLEM M,et al.Torque ripple reduction of switched reluctance motors considering copper loss minimization[C]//IEEE International Conference in Industrial Technology(ICIT).IEEE,2014:858-865.
[8] SAHOO S K,PANDA S K,XU J X.Application of spatial iterative learning control for direct torque control of switched reluctance motor drive[C]//Power Engineering Society General Meeting.2007:1-7.
[9] MIKAIL R,HUSAIN I,SOZER Y,et al.Torque-ripple minimization of switched reluctance machines through current profiling[J].IEEE Transactions on Industry Applications,2013,49(3):1258-1267.
[10] VUJICIC V P.Modeling of a switched reluctance machine based on the invertible torque function[J].IEEE Transactions on Magnetics,2008,44(9):2186-2194.
[11] XUE X D,CHENG K W E,HO S L.Optimization and evaluation of torque-sharing functions for torque ripple minimization in switched reluctance motor drives[J].IEEE Transactions on Power Electronics,2009,24(9):2076-2090.
[12] DOWLATSHAHI M, SAGHAIAN-NEJAD S M,AFSHOON M,et al.High efficient torque control of switched reluctance motor taking nonlinear and saturation effects into account[C]//4th Drive Systems and Technologies Conference (PEDSTC) in Power Electronics,2013:49-54.
[13] 党选举,袁小唐,胡景佳.基于柔性神经网络的SRM直接瞬时转矩控制[J].电气传动,2014,44(5):62-66.
[14] 陈坤, 王喜莲.不同结构的开关磁阻电动机对比分析[J].微特电机,2014,42(12):1-4.
[15] KUCUK F,GOTO H,GUO H J,et al.Fourier series based characterization of switched reluctance motor using runtime data[C]//XIX International Conference on Electrical Machines (ICEM),2010:1-6.
Constant Torque Control for SRM Using TSF Based on Nonlinear Current Compensation
DANGXuan-ju,ZHOUZi-wen,ZHANGGuang-pu
(Guilin University of Electronic Technology,Guilin 541004,China)
A novel torque sharing function (TSF) control of nonlinear compensation of current was proposed for sovling the problem that the previous desired current calculated by linear inductance model cannot satisfy the nonlinearity between torque and current, which aimed at reducing the torque ripple of switched reluctance motor.By the introduction of instantaneous torque feedback on the basis of prime TSF control, the torque deviation was converted into current deviation by the nonlinear calculation process using the Taylor polynomial.Afterwards, the complemental current was superposed to the primary path current.In such a way, the nonlinearity of current and torque was compensated respectively and the constant torque control was accomplished.Simulation results prove that under the optimal current control, the output torque can quickly converge to the given torque and the fluctuations are significantly weakened.
switched reluctance motor; torque sharing function (TSF); Taylor polynomial; nonlinear current
2015-08-11
国家自然科学基金项目(60964001,61263013);广西信息科学实验中心重大项目(20130110)
TM352
A
1004-7018(2016)09-0065-04
党选举(1965-),男,教授,博士生导师,主要从事非线性系统建模与控制、精密智能机电测控系统等方面的研究。
猜你喜欢
大电机技术(2022年5期)2022-11-17
中国特种设备安全(2022年3期)2022-07-08
防爆电机(2021年4期)2021-07-28
数理报(学习实践)(2021年5期)2021-04-07
电子制作(2018年19期)2018-11-14
电测与仪表(2016年1期)2016-04-12
舰船科学技术(2015年8期)2015-02-27
地震研究(2014年1期)2014-02-27
英语学习·新锐空间(2013年1期)2013-05-08
军事历史(1999年4期)1999-08-20
