
基于Kautz模型的永磁同步电动机调速系统电流预测控制
2016-12-20 05:18高旭东许鸣珠栾东雪
微特电机 2016年9期
高旭东,许鸣珠,栾东雪
(石家庄铁道大学,石家庄 050043)
基于Kautz模型的永磁同步电动机调速系统电流预测控制
高旭东,许鸣珠,栾东雪
(石家庄铁道大学,石家庄 050043)
提出了一种基于Kautz模型的自适应增量式模型预测控制算法,并将该算法应用到基于DSP TMS280F2812的永磁同步电动机数字控制平台上,实现了对永磁同步电动机电流的数字控制。根据数字控制平台的局限性,作者对该算法进行了优化。大量实验证明,提出的模型预测控制算法可以使永磁同步电动机电流控制系统具有较快的响应速度,较为平稳的运行状态,较强的鲁棒性,在电机控制领域具有较高的工程应用价值。
Kautz模型;模型预测控制;永磁同步电动机;电流控制;算法优化
0 引 言
永磁同步电动机(以下简称PMSM)的电流控制方法一般是采用控制器对电机的交、直轴电流分别进行控制,简化了控制过程,提高了控制精度[1]。PMSM电流控制系统要求在满足动态和静态控制性能的同时,还要抑制非线性、参数时变等因素对系统的影响[2]。传统的电流控制系统通常采用PID/PI控制,该方法原理上是一种线性调节器,靠目标与实际行为之间的误差来决定控制策略,具有控制原理简单、实现方便、控制参数彼此独立、参数容易整定等优点[3-4]。但PID/PI控制器在应用中普遍存在噪声和超调,很难同时保证响应的稳定性和快速性,在高性能控制场合存在一定的局限性。
模型预测控制(Model Predictive Control, MPC)是在20世纪70年代提出的,最初被用于复杂的工业控制领域。它是一种基于模型的控制算法,但是只对模型的功能有要求,对模型的形式没有太多限制[5-6],利用具有预测功能的模型和当前系统状态预测系统的未来状态,在每个控制周期内利用最优控制方法根据系统的参数来对系统控制量输入进行计算与优化,从而实现系统的快速、稳定控制[7]。文献[8-9]介绍了基于Laguerre模型的预测控制算法,该系统对时延和模型的结构变化适应性较好,但是Laguerre模型是单极点网络,能够高效的逼近过阻尼系统,对于欠阻尼系统或特性变化较大的系统逼近效果较差[10-12]。而具有两个极点的Kautz函数能够有效地逼近控制系统模型[13],克服了Laguerre函数滤波网络的局限性。本文利用截断的Kautz函数模型[14]作为预测控制的函数模型,使用最优控制率对控制量进行优化,利用最小二乘法在线辨识模型参数,并根据硬件控制平台芯片的特性以及控制效果的要求改进了预测控制算法,将位置式控制改为了增量式[15-16],降低系统运算量的同时也减小了系统误差。通过大量实验证明,基于Kautz模型的预测控制可以有效地解决了PID/PI控制器的局限性,实现对PMSM调速系统电流环的数字化控制。
1 Kautz函数模型
Kautz函数是平方可积函数空间上的一组正交基,滤波网络拥有两个极点,可以利用它来逼近欠阻尼系统或特性变化较大的情况,这种特性理论上完全适用于永磁同步电动机系统模型。文献[10,17-18]详细介绍了Kautz函数的定义以及网络极点的取值以及截断阶次。将Kautz模型离散化以后可以表示为如下状态方程的形式:
X(k+1)=A1X(k)+A2X(k-1)+BU(k)
y(k+1)=CX(k+1)
(1)
式中:U(k)=[u(k-1)u(k)]T;A1,A2,B是如下矩阵,其中的具体参数定义可参照文献[11-12]。
由状态空间方程可知方程状态向量X(k+1)可以通过模型和系统输入U(k)计算得到,则模型输出y(k+1)可以由系数向量C和状态向量X(k+1)获得。向量C可以应用带有遗忘因子的最小二乘辨识算法在线获得。
(2)
式中:0<λ<1为遗忘因子。
2 基于Kautz模型的模型预测控制
基于Kautz函数逼近模型的模型预测控制算法主要分为预测模型、反馈矫正、滚动优化及参数辨识三部分,其控制结构如图1所示。预测模型根据控制量状态对系统输出进行预测,并根据系统的反馈值和设定值进行滚动优化和参数辨识,实现了受控对象的最优控制。
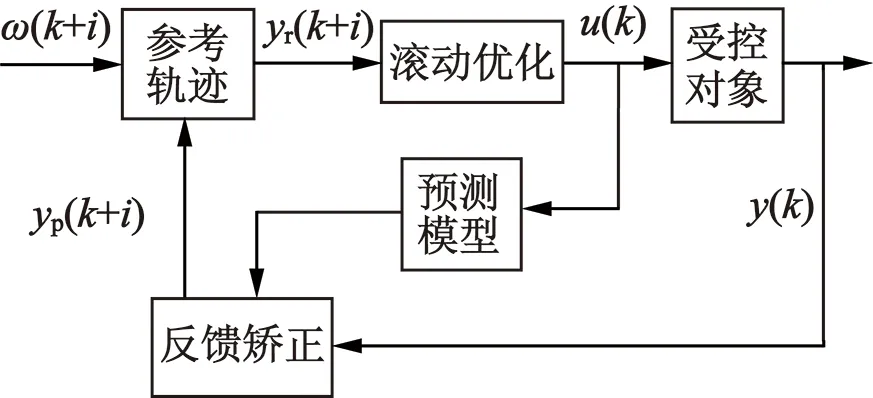
图1 基于Kautz模型的模型预测控制结构框图
考虑到本实验平台选用的DSP控制器处理数据的速度和能力,本着尽量减少运算量提高运算速度和控制精度的原则,将式(1)的状态空间方程改为了增量型控制,将控制增量加入到预测模型中。则基于Kautz模型的增量型预测控制算法模型:
ΔX(k+1)=A1ΔX(k)+A2ΔX(k-1)+BΔU(k)
ym(k+1)=ym(k)+CΔX(k+1)
(3)
利用线性反馈预测理论[12],由式(3)可得未来k+i时刻的系统模型输出:
ym(k+i)=ym(k)+CQaiΔX(k)+CQbiΔX(k-1)+
(4)
式中:参数Qai和Qbi表示下面的形式:
Qa1=A1;
Qa2=A1Qa1+A2;
Qa3=A1Qa2+A2Qa1;
…;
Qai=A1Qa(i-1)+A2Qa(i-2);
Qb1=A2;
Qb2=A1Qb1;
Qb3=A1Qb2+A2Qb1;
…;
Qbi=A1Qb(i-1)+A2Qb(i-2)
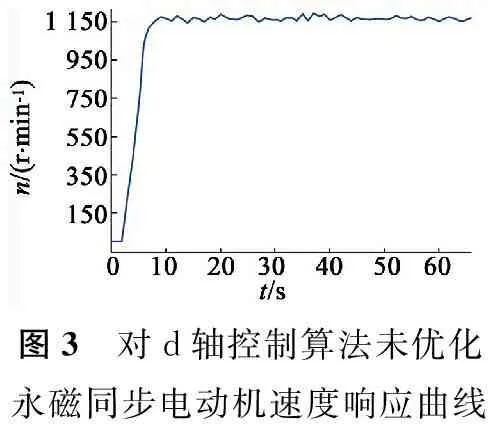
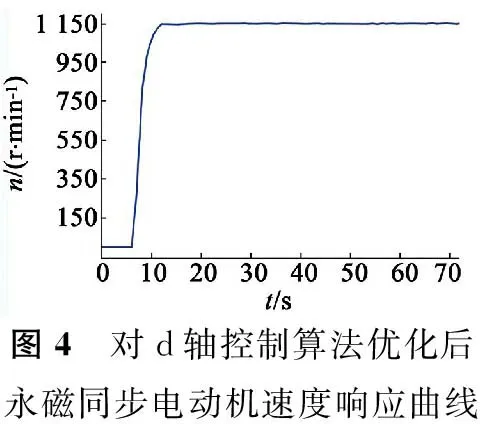
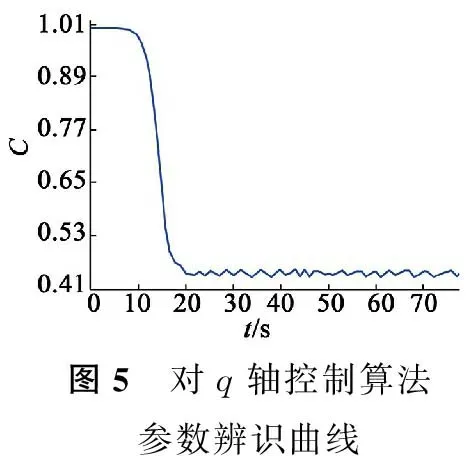
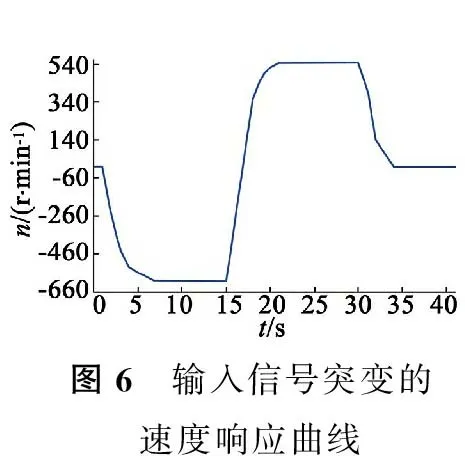
参数QjCi的取值规律如下:如果j=i,则QjCi=B2;如果j=i-1,则QjCi=A1QjC(i-1)+B1;如果j 将系统的预测控制增量方程写为矩阵形式: GcΔu(k-1)+GU (5) 为了消除模型误差以及实际过程中存在的干扰导致的输出预测误差,提高预测精度,本文采用反馈矫正来修正系统未来i时刻的预估值[9],即有: yp(k)=ym(k)+h[y(k)-ym(k)] (6) 式中:y(k)为k时刻系统的输出;ym(k)为k时刻模型输出;h为反馈增益值。 系统的参考轨迹取值为: yr(k+i)=αω(k)+(1-α)yp (7) 式中:ω(k)为系统设定值;α为柔化因子。 由二次型性能指标确定系统最优控制率: (8) 式中:Q,R分别为加系数权矩阵和误差权系数矩阵,Q=diag(q1,…,qp),R=diag(r1,…,rm)。 (9) 式(9)中(GTQG+R)-1为一i×i维矩阵,可以一次计算出从k到k+i-1时刻的i个控制量,但在实际执行时,由于模型误差、系统因自身特性以及外界因素的干扰等因素的影响,若按式(9)计算经过i步控制后可能会偏离参考轨迹较多[19]。同时该最优控制量的求解运算较为复杂,控制器硬件的计算能力也有限。为了能够及时纠正误差,减小控制器的运算负担,对该最优控制算法进行改进。在应用中避免多维向量同时控制,尽量使用单输入单输出系统[16],即按式(9)算得控制量后,实际只执行当前一步,得出下一时刻控制增量Δu(k)。因此由式(9)得: Δu(k)=(1,0,…,0) (10) 从而得到k时刻系统实际控制量u(k)=u(k-1)+Δu(k),然后在下一周期继续按式(10)递推因此该方法被称为“滚动优化”[7]。 在模型参数确定后,状态向量X(k)可以由经过最优控制优化后的控制量输入u(k)计算得到,因此模型输出ym(k)与Kautz系数向量C有以下线性关系: ym(k)=CX(k) (11) 系数向量C可以通过带遗忘因子的最小二乘法在线辨识获得。 为了验证本文所提预测控制算法对永磁同步电动机电流环控制的有效性,编写相应程序将上述方法在永磁同步电动机控制系统上进行实验。建立了以TI公司研发的TMS320F2812定点计算运动控制芯片为核心的永磁同步电动机数字伺服控制系统[20],其时钟频率为150 MHz,系统的控制周期为50 μs。驱动系统是由IGBT搭建的桥型电路,控制系统产生的SVPWM信号经过线性驱动后输出给驱动系统,再由驱动系统将信号输送给永磁同步电动机。采用的永磁同步电动机参数如下:200 W,36 V输入,额定电流7.5 A,输出转矩0.637 N·m,磁极对数为4,转子转动惯量J=0.189×104 kg·m2线电感0.9 mH,线电阻0.33 Ω。永磁同步电动机采用的控制驱动方式为电压空间矢量控制,控制器软件设计采用的是C语言,所用的开发环境为CCS5.5,同时该开发环境可实时监测当前系统内各个变量的变化曲线,其程序结构控制方式如图2所示。 图2 永磁同步电动机程序结构控制方式 从控制意义上说,预测控制是一种实时的优化算法,它可以做到减小开关损耗、降低开关频率、减小谐波损耗等优化目标[21]。对于目前的工业控制器来说,由于预测控制模型的数据变化动态范围大,在线辨识运算要求的实时性较高,运算精度和速度都不能达到理想状态。因此需要对模型预测的数据和结构进行优化。 4.1 控制算法的数据参数优化 本文使用的控制器为TI公司生产的定点运算控制器,由上文可知基于Kautz模型的预测控制的系数矩阵和控制量输出均为浮点型数据,需将控制系统中的参数转换为IQ整数格式进行运算。在实验过程中监测的数据显示,预测模型在进行计算尤其是进行参数辨识时数据动态范围变化非常大,导致IQ格式数据精度不足或数据溢出。将所有数据改为浮点型运算,虽然导致运算周期变大,但运算精度能够得到保证。 为了减轻DSP的运算负担还将系统内的一些无需在线优化的参数做了离线计算,直接写进程序中。在最优控制率计算中,计算结果只取所求矩阵的第一个元素,所以先在线下推导出求解第一个元素所需参数及其方程式,然后将该式直接写入程序中,将大规模的矩阵运算转变为多项式计算提高了程序运行的效率。 在实验初期考虑到DSP数据的存储量和运算能力,为了满足系统高速实时控制的要求,提前计算出控制系统模型系数A1,A2,B,C,程序中直接使用固定常数。同时对控制系统进行3步预测控制,通过多步预测结果来弥补因系统模型系数降阶固化产生的误差。经过实验,该优化方法大大提高了运算速度,在控制精度上也能够满足要求。 4.2 控制算法的结构优化 预测控制模型在初始启动时,由于模型没有经过辨识,误差较大,造成输出的控制量出现超调,导致永磁同步电动机出现运行卡顿、堵转甚至过载的状态,容易产生事故。因此需要对目前控制算法的控制方式进行优化。 ud(k)=Δud(k) (12) 由于d轴的数量级也会影响到控制量的在线优化,导致辨识误差巨大。考虑到Kautz函数模型也较为庞大,在DSP中计算会影响到控制系统的实时性,所以将对d轴的模型预测控制系统参数改为了定值计算。即对d轴的预测控制系数C不进行在线辨识,而是通过实验监测确定d轴C的一个取值范围,直接将C设置为该范围内的某个定值。而对于q轴的控制则按照前文所述算法模型进行预测控制,不做结构上的改变。 经过实验验证将算法优化后既减轻了DSP的运算负担,又提高了整套系统的运算速度,d轴电流的控制精度也未受到影响。 本文利用基于Kautz模型的增量式模型预测控制算法对用于控制永磁同步电动机的电流,实现电机的快速启动平稳运行。首先设定Kautz函数模型ξ=0.66+0.48i,设定q轴预测控制参数反馈增益h=0.9,柔化因子α=0.8,遗忘因子λ=0.99,系统参数C初值为1;d轴预测控制参数反馈增益h=0.9,柔化因子α=0.8,系统参数C定值为0.3。 为了验证本文所提基于Kautz函数模型的预测控制对电机电流的控制效果,首先对比d轴在使用在线辨识和优化后使用固定值计算的控制效果,在给定系统一个1 150 r/min的阶跃输入信号后,图3和图4分别是对d轴控制算法优化前和优化后的输出响应曲线。两图对比可知,当d轴不做优化,对系统参数做实时辨识的时候由于辨识误差较大,DSP因在线辨识实时性变差最终导致电机运行不稳定,速度波动较大。当对d轴作了优化后,减小了DSP的运算量以及运算误差,电机响应迅速平稳。对于q轴的控制,其系统参数需要进行在线辨识,为了观察在线辨识的效果,作者在对d轴优化后,输入阶跃信号的同时对q轴模型预测控制系统的参数C变化进行了监控,如图5所示,可观察到系统参数辨识响应迅速,且在电机稳态运行时参数波动范围小,呈现一定的周期性变化。 为了验证永磁同步电动机面临速度突变时系统的响应状态,在静止状态给系统输入一个反向600 r/min阶跃信号,等待电机运行稳定后,再给系统一个正向600 r/min的输入信号,最后等待电机运行平稳后再让电机停止运行。系统转速响应曲线如图6所示。从图中可以看出,模型预测控制的速度响应柔和、稳定、无超调量,并且响应时间也在系统响应允许的范围内。在稳态运行时,系统速度稳定,抖动很小。 图3 对d轴控制算法未优化永磁同步电动机速度响应曲线 图4 对d轴控制算法优化后永磁同步电动机速度响应曲线 图5 对q轴控制算法参数辨识曲线图 图6 输入信号突变的速度响应曲线 本文将所提的基于Kautz模型的增量式模型预测控制算法应用于永磁同步电动机数字调速系统的电流控制中。针对实验系统硬件特性对模型算法进行了优化,实验证明DSP系统完全可以在规定的时间内将控制量计算输出,实现了永磁同步电动机的高性能控制。本文所提控制算法不需要知道控制系统的具体模型,通过带有遗忘因子的最小二乘法在线辨识控制系统参数,提高了该控制算法的适用范围。基于Kautz模型的预测控制计算量较大,应用起来较为复杂,对硬件系统要求高,所以该算法可应用于一些系统性能要求高、投资大的场合,具有较高的实际应用价值。 [1] 牛里,杨明,刘可述,等.永磁同步电机电流预测控制算法[J].中国电机工程学报,2012,32(6):131-137. [2] 袁登科,陶生桂.交流永磁电机变频调速系统[M].北京:机械工业出版社,2011. [3] 赵景波.MATLAB控制系统仿真与设计[M].北京:机械工业出版社,2010. [4] 孟芳芳,邵雪卷.基于DSP感应电机预测函数控制数字实现[J].微电机,2014,47(11):38-41. [5] 丁宝苍.预测控制的理论与方法[M].北京:机械工业出版社,2008. [6] 席裕庚.预测控制[M].北京:国防工业出版社,1993. [7] 郑泽东,陈宁宁,李永东.基于模型预测控制的异步电机弱磁控制新方法[J].电工技术学报,2014,29(3):33-40. [8] 李嗣福,刘勇.一种基于Laguerre函数模型的预测控制算法[J].中国科技大学学报,1999,29(3):281-288. [9] 吴丽娟,张宁,谢元旦.基于Laguerre级数模型的自适应动态矩阵控制[J].控制与决策,1997,12(1):37-42. [10]WAHLBERGB.SystemidentificationusingKautzmodels[J].IEEETransactionsonAutomaticControl,1994,39(6):1276-1282. [11] 许鸣珠,刘贺平,李晓理,等.基于KAUTZ模型的预测控制仿真研究[J].系统仿真学报,2007,19(15):3481-3484. [12] 许鸣珠,刘贺平,李晓理,等.基于KAUTZ模型的预测函数控制及其稳定条件[J].北京科技大学学报,2007,29(11):1171-1176. [13]TANGUYN,MORVANR,VILBEP,etal.PertinentchoiceofparametersfordiscreteKautzapproximation[J].IEEETransactionsonAutomaticControl,2002,47(5):783-787. [14]DENBRINKERAC,BENDERSFPA,OLIVEIRAESTAM.OptimalityconditionsfortruncatedKautzseries[J].IEEETransactionsonCircuitsandSystems,1996,43(2):117-122. [15] 姚伟,孙海顺,文劲宇,等.基于Laguerre模型的过热汽温自适应预测PI控制系统[J].中国电机工程学报,2012,32(5):119-125. [16] 郑泽东,王奎,李永东,等.采用模型预测控制的交流电机电流控制器[J].电工技术学报,2013,28(11):118-123. [17]MBAREKA,MESSAOUDH,FAVIRG.RoubustpredictivecontrolusingKautzmodel[C]//Proceedingsofthe2003 10thIEEEInternationalConferenceonElectronics,Circuits,andSystems,2003:184-187. [18]MORVANR,TANGUYN,VILBEP.PertinentparametersforKautzapproximation[J].ElectronicsLetters(S0013-5194),2000,36(8):769-771. [19] 舒迪前.预测控制系统及其应用[M].北京:机械工业出版社,1996. [20] 纪科辉,沈建新.采用扰动转矩观测器的低速电机伺服系统[J].中国电机工程学报,2012,32(15):100-106. [21] 李永东.交流电机数字控制系统[M].2版.北京:机械工业出版社,2014. Current Predictive Control of PMSM Speed Control System Based on Kautz Model GAOXu-dong,XUMing-zhu,LUANDong-xue (Shijiazhuang Tiedao University, Shijiazhuang 050043,China) An adaptive incremental model predictive control algorithm based on Kautz model was proposed.And the algorithm was applied to the digital control platform of permanent magnet synchronous motor based on TMS280F2812 DSP, and the digital control of permanent magnet synchronous motor current was realized.According to the limitation of the digital control platform, the optimization to the algorithm was carried on.After a large number of experimental studies show that the model prediction control algorithm proposed in this paper can make the permanent magnet synchronous motor current control system has fast response speed, stable running, strong robustness, and has higher engineering application value. Kautz model; model predictive control (MPC); PMSM; current control; algorithm optimization 2015-12-07 国家自然科学基金面上项目(11372198);河北省教育厅科学技术重点项目(Z9900451) TM351 A 1004-7018(2016)09-0078-05 高旭东(1990-),男,硕士研究生,研究方向为永磁同步电机调速系统设计、机电系统控制及自动化。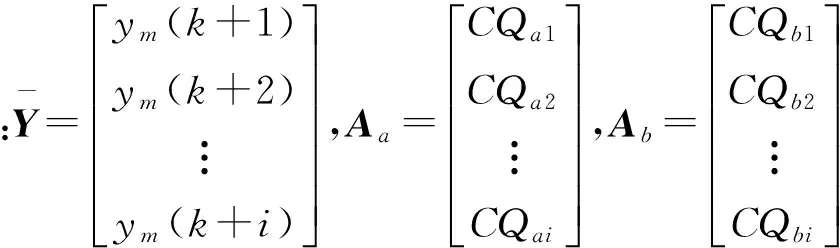

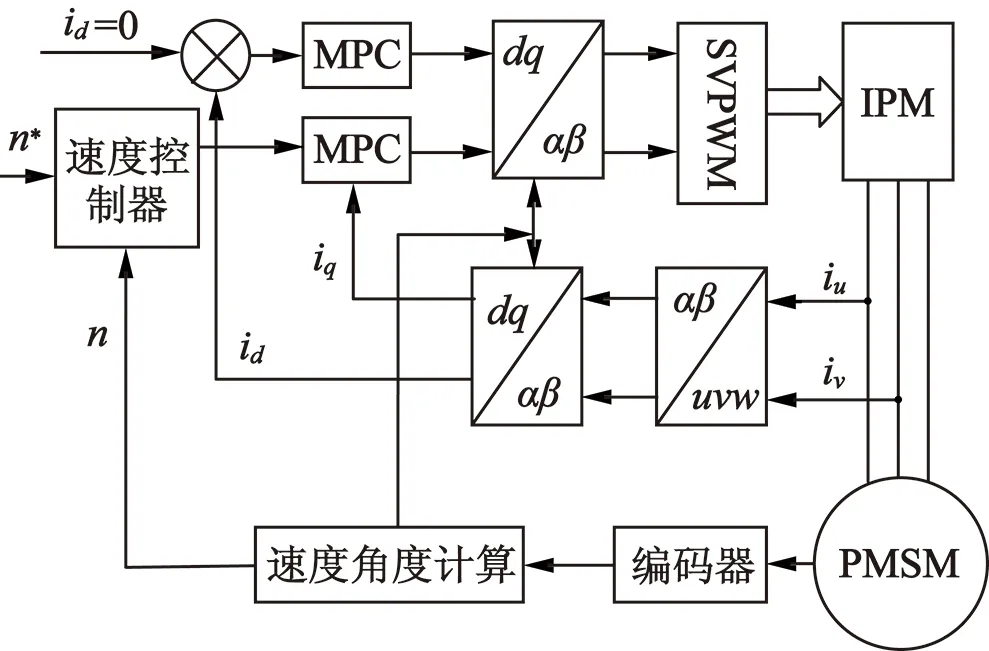
3 实验平台描述
4 基于实验平台的算法优化
5 实验分析对比
6 结 语
猜你喜欢
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
纺织科学研究(2020年1期)2020-05-21
制造技术与机床(2017年6期)2018-01-19
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
舰船科学技术(2015年8期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
组合机床与自动化加工技术(2014年12期)2014-03-01
