
基于滑模的圆筒直线电机位置控制系统研究
2016-12-20 05:18李倩龙潘剑飞
微特电机 2016年9期
夏 俊,李倩龙,潘剑飞,张 博
(1.深圳市电子学会,深圳 518052;2.深圳电磁控制重点实验室,深圳 518060)
基于滑模的圆筒直线电机位置控制系统研究
夏 俊1,李倩龙2,潘剑飞2,张 博2
(1.深圳市电子学会,深圳 518052;2.深圳电磁控制重点实验室,深圳 518060)
无铁心圆筒直线电机具有重量轻、惯性小、响应速度快等优点,广泛应用于工业加工及制造领域。由于此类控制系统易受参数变化和负载扰动等不确定因素的影响,且传统比例-积分-微分(PID)控制器难以保证此类被控对象快速性和稳态性能的缺点,采用基于指数趋近律的滑模算法,缩短滑模变量的趋近时间,从而提高该直线电机位置控制系统的响应速度。实验结果表明,该方法使无铁心圆筒直线电机位置控制系统同时具有响应速度快和稳态性能高的优势,在幅值为10 mm,频率为0.5 Hz方波参考位置信号下,上升时间不超过29 ms,绝对稳态误差精度控制不超过3 μm。
无铁心圆筒直线电机;滑模;位置控制;趋近律
0 引 言
作为直驱直线电机的一种,圆筒型直线电机可以直接驱动负载作直线运动,无需旋转电机配合机械传动装置转变成直线运动。这类直线电机具有响应速度高、损耗低等优点,在响应速度快及高精度的直线交流伺服系统中获得广泛应用[1]。圆筒直线电机从结构上分为有铁心圆筒直线电机和无铁心圆筒直线电机(Ironless Tubular Permanent Magnet Linear Motor, ITPMLM),与有铁心圆筒直线电机相比,ITPMLM重量轻、惯性小、运行噪音更低,不存在齿槽效应以及铁心两端开端引起的推力波动问题[1]。但模型参数的非确定性及外部的干扰等因素增加了控制难度。采用传统PID控制器一般可以使控制系统获得较好的鲁棒特性和控制效果,由于圆筒型直线电机这类被控对象模型对控制参数敏感,因此,系统的快速性以及稳态性能很难同时兼顾[2]。文献[3]采用直接推力方法设计的系统控制器,该控制方法舍去矢量旋转变换等复杂运算,使控制系统计算简化,从而提高系统的快速响应能力。但该方法具有电压矢量不连续造成的磁链脉动及低速运行性能差等问题。文献[4]采用基于指数趋近律滑模控制方案进行仿真分析,该方法使控制系统具有较快的响应速度和较好的鲁棒性,但并未搭建实验平台得出实验结果,也没有分析系统的响应性能。
本文采用基于指数趋近律的滑模控制方法设计位置控制器,搭建实验平台,并与传统PID控制器实验结果相比,滑模控制器下位置跟踪响应速度、收敛速度以及稳态精度都有所提高。
1 电机结构
被控对象是Copley公司生产的SM1104型ITPMLM。ITPMLM实物图如图1所示,其主要由基座、导轨、定子杆、动子以及位置传感器等组成。图2为ITPMLM沿定子杆轴线1/4剖面结构示意图,其中动子由绕组和绕组支架组成,绕组支架采用环氧树脂材料塑封而成。定子由永磁体和不锈钢管组成,永磁体采用稀土材料钕铁硼制作而成,轴向充磁;极性相反依次排列。动子和定子之间有一定气隙。该电机的结构为4极6槽,极距为25.6 mm,可得电机对应的槽距为17.07 mm。表1为电机的主要结构参数。

图1 ITPMLM实物图
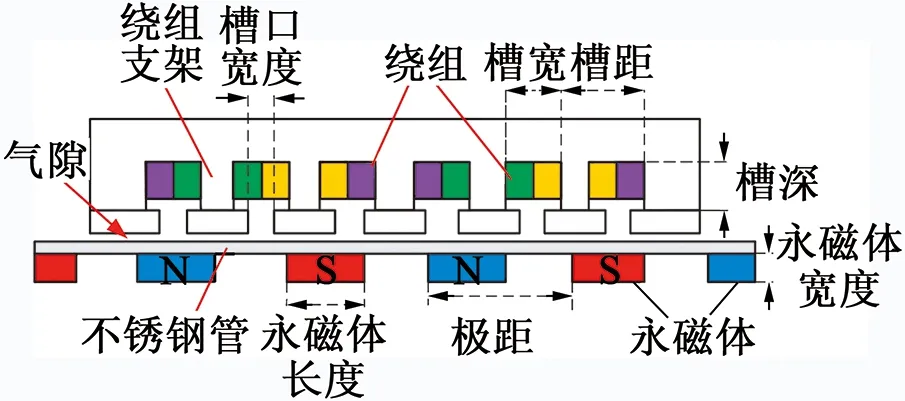
图2 ITPMLM剖面结构示意图
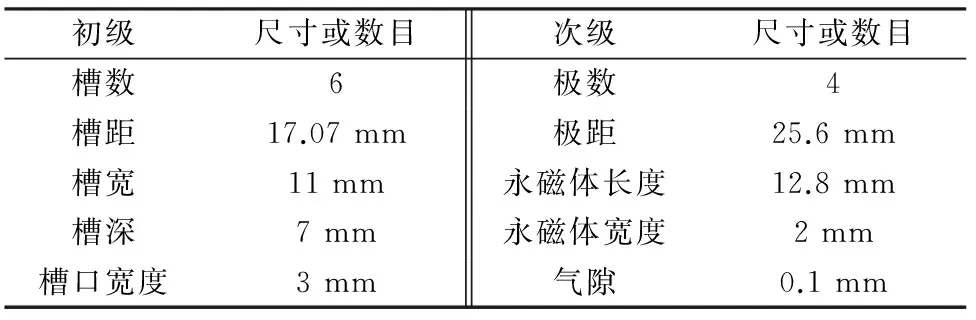
初级尺寸或数目次级尺寸或数目槽数6极数4槽距17.07mm极距25.6mm槽宽11mm永磁体长度12.8mm槽深7mm永磁体宽度2mm槽口宽度3mm气隙0.1mm
2 滑模变结构控制设计
滑模变结构控制实质是一种综合的、有效的鲁棒控制方法。但该控制方法不同于其它控制方法主要之处在于系统的“结构”是变化的,通过选择滑模平面,设计控制器,当达到一定匹配要求时,系统依照预设“滑动模态”的状态轨迹进行运动,对参数摄动和外界干扰具有完全的鲁棒性[5-6],所以变结构控制常被称为滑动模态控制,简称滑模控制。

x(k+1)=Ax(k)+Bu(k)=
(1)

令被控系统的位置指令为r(k);dr(k)是它的变化率,取R=[r(k);dr(k)],R1=[r(k+1);dr(k+1)]。用线性外推的方法预测r(k+1),dr(k+1),即:

(2)
切换函数:
s(k)=Ce[R-x(k)]
(3)
u(k)=(CeB)-1[CeR1-CeAx(k)-s(k+1)]
(4)
趋近律:
s(k+1)=s(k)+T{-εsgn[s(k)]-qs(k)}
(5)
式中:T为采样周期。由式(4)和式(5),获得基于指数趋近律无铁心圆筒永磁直线电机的离散控制律:

(6)
式中:ds(k)=-εTsgn [s(k)]-qTs(k),且ε>0,q>0。
基于趋近律所设计的离散滑模变结构控制器,可以调节的参数为q,ε,c。其中q为趋近速度参数,q的数值在切换函数动态变化过程起到重要作用,决定了系统趋近滑模面的速度,从而进一步优化被控系统的动态性能。随着q值的增加,被控系统到达切换平面的速度也随之加快;当q越趋近于1/T时,被控系统达到切换平面的时间越短[7]。
滑模面参数c决定了控制器切换函数,这是因为c的取值决定了在滑模面上运动的渐进稳定和较好的动态性能[7]。c取值越大,滑模面上的运动速度越快,被控系统的快速性能也就越好。同时,增大滑模参数c和趋近速度参数q的值均可以加快系统响应的快速性。但是过大的参数取值会导致系统输出量过大,从而使系统出现抖振现象。解决系统参数摄动及外干扰主要靠调节符号函数的增益参数ε,ε取值越大,系统抵抗摄动以及外界干扰的性能就越强。但过大的系统增益会引起系统抖振加大,一般系统的抖振幅度与参数ε成正比关系[7]。
3 实验平台搭建
ITPMLM位置控制系统框图如图3所示。控制算法采用传统PID策略和滑模变结构控制方法,从而比较研究在不同的控制策略下,系统的性能差别。系统的参考位置与传感器反馈的实际位置的差值分别作为两种控制器的输入信号,两控制器的输出信号分别作用于驱动器进而控制圆筒直线电机。ITPMLM位置控制系统的整体实验装置平台如图4所示。该位置控制系统主要由无铁心圆筒永磁直线电机、电源、驱动器、位置传感器、dSPACE控制板卡和用于编写控制程序、建立控制界面的计算机等组成。
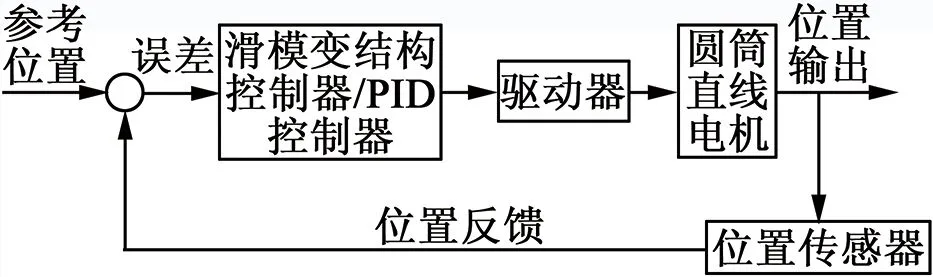
图3 ITPMLM位置控制系统框图
4 实验结果及分析
搭建好实验平台,设定系统的输入信号为频率为0.5 Hz,幅值为10 mm的方波信号,运行控制程序得到PID控制器以及滑模控制器下ITPMLM的位置跟踪曲线如图5所示,图中显示PID控制器下ITPMLM在方波的下半周期位置的最低点是-10.38 mm,即ITPMLM在下半周期超调为1.9%。
将图5中区域A放大得到图6,可以看出在滑模控制下系统位置响应的上升时间为0.029 s,调节时间为0.026 s(幅值20 mm,±2%的误差带),在上半周期有超调1.35%,PID控制下系统位置响应的上升时间为0.223 s,调节时间为0.123 s。
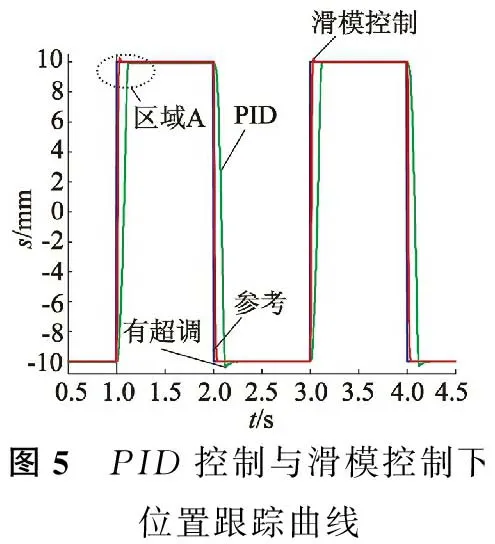
图5 PID控制与滑模控制下位置跟踪曲线
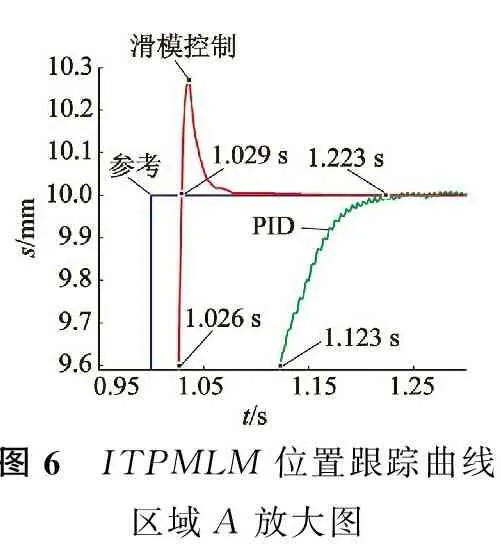
图6 ITPMLM位置跟踪曲线区域A放大图
图7 为PID控制器与滑模控制器下ITPMLM的位置跟踪误差曲线,将区域B放大可以得到图8,根据图8可以看出,在PID控制器下系统稳态精度在52 μm内,其中波形上升阶段的跟踪精度为52 μm,下降阶段的跟踪精度为12.5 μm;在滑模控制下系统的稳态精度在3 μm内,其中波形上升阶段的跟踪精度为1 μm,下降阶段的跟踪精度为3 μm。
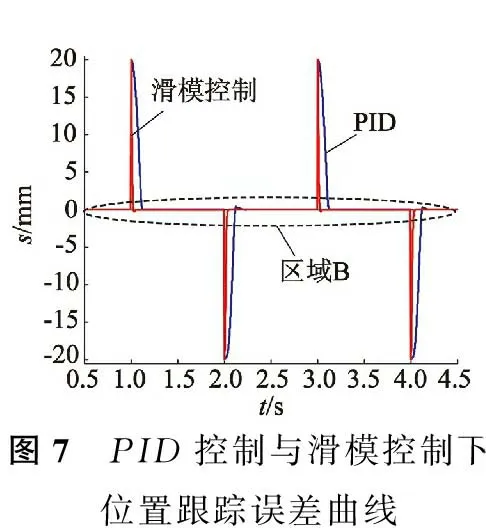
图7 PID控制与滑模控制下位置跟踪误差曲线

图8 ITPMLM位置跟踪误差曲线区域B放大图
表2汇总了PID控制器与滑模控制器下位置控制系统动态与稳态性能指标。

表2 PID控制与滑模控制下系统响应指标比较
由表2可知,滑模控制较PID控制,系统的响应速度和收敛速度都有所加快,超调减少,系统的稳态精度有了明显的提升。
5 结 语
本文将一种基于指数趋近律的二阶滑模控制方法,应用于对ITPMLM的位置控制,搭建了基于PID控制器与滑模控制器的ITPMLM位置控制系统实验平台。实验结果表明,基于滑模控制器的位置控制系统对ITPMLM的控制取得了快速的暂态性能和良好的稳态性能,其中位置上升时间不超过0.029 s,绝对稳态误差达到3 μm。
[1] 陈艳龙.圆筒型无铁心永磁同步直线电机研究[D].南京:东南大学,2014:11-12.
[2] 罗天资,陈卫兵,邹豪杰,等.直线电机模糊增量PID 控制算法的研究[J].测控技术,2011,30(2):56-59.
[3] 赵晓娟,崔建明.永磁直线同步电动机直接推力控制的仿真研究[J].电气技术,2012(1):36-39.
[4] 陈展琴,孙宜标,王丽梅,等.基于指数趋近律的永磁直线电机二阶滑模控制[C]//第十一届沈阳科学学术年会暨中国汽车产业集聚区发展与合作论坛论文集(信息科学与工程技术分册).2014.
[5] 曹广忠.磁悬浮系统控制算法及实现[M].北京:清华大学出版社,2013:150-154.
[6] 徐世许.不确定系统的终端滑模变结构控制[D].上海:复旦大学,2012:9-10.
[7] 刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用,2007,24(3):407-418.
Research on Position Control System of Tubular Linear Motor Based on Sliding Mode
XIAJun1,LIQian-long2,PANJian-fei2,ZHANGBo2
(1.Shenzhen Institute of Electronics,Shenzhen 518052,China; 2.Shenzhen Key Laboratory of Electromagnetic Control,Shenzhen 518060,China)
Non-core tubular linear motor has the advantages of light weight, low inertia and fast response, it is widely used in industrial processing and manufacturing fields.Since these control systems were susceptible to parameter variations and load disturbances and other uncertainties, and the traditional proportional-integral-derivative (PID) controllers is hard to guarantee that the controlled objects have a fast and a good steady-state performance, a sliding mode algorithm based on exponential reaching law was adopted to shorten the sliding variables approaching time, and then the response rate of position control system for linear motor was improved.The experiment results show that this method makes the position control system is capable of fast response and good steady-state performance, the rise time is no more than 29 ms and the absolute steady-state error falls into 3 μm in the amplitude of 10mm, a frequency of 0.5 Hz square wave position reference signal.
ironless tubular linear motor; sliding mode; position control; reaching law
2016-03-22
国家自然科学基金项目(51477103,51577121);广东省自然科学基金项目(S2014A030313564,S2015A010106017)
TM359.4
A
1004-7018(2016)09-0086-03
夏俊(1971-),男,硕士,研究方向为电子及通信技术。
猜你喜欢
电子设计工程(2022年15期)2022-08-17
防爆电机(2021年3期)2021-07-21
数学大王·低年级(2020年8期)2020-08-14
光通信研究(2020年2期)2020-06-15
科技创新与应用(2019年17期)2019-06-09
微特电机(2019年2期)2019-02-25
作文中学版(2018年11期)2018-11-29
民间故事选刊·上(2018年5期)2018-05-18
中国环境监察(2017年8期)2017-10-23
微处理机(2016年2期)2016-06-16
