
基于数据驱动的随机子空间优化算法及应用
2016-12-22 10:03荀敬川贺拴海高俊亮
公路交通科技 2016年12期
荀敬川,贺拴海,高俊亮
(1.长安大学 桥梁与隧道陕西省重点实验室, 陕西 西安 710064;2.北京新智交科科技开发有限公司, 北京 100010)
基于数据驱动的随机子空间优化算法及应用
荀敬川1,贺拴海1,高俊亮2
(1.长安大学 桥梁与隧道陕西省重点实验室, 陕西 西安 710064;2.北京新智交科科技开发有限公司, 北京 100010)
为了提高随机子空间法的识别速度,采用MAC准则优选数据精简Hankel矩阵的“过去”输出数据和通过简化模态参数识别步骤的方法,推导了随机子空间优化算法,并借助Matlab平台编写程序以达到快速化识别的目的。其一精简Hankel矩阵“过去”输出数据的同时有效地避免了模态遗漏; 其二详尽分析了Hankel矩阵QR分解得到的子矩阵R21,将可观测矩阵与矩阵R21的奇异值分解建立直接关系,避免求解投影矩阵。研究结果表明:使用部分数据作为“过去”输出数据,减少了计算量;避开求解投影矩阵,简化了计算步骤; 避免高维矩阵的存储和分解,很大程度上改善了计算机的使用内存;识别速度增幅明显,精度与其他文献相吻合。最后以西宁北川河桥为工程算例,验证了该优化算法的实用性和有效性,得到比较理想的结果。
桥梁工程;优化算法;数值分解;随机子空间;矩阵;模态参数
0 引言
模态分析技术可分为3大类[1]:其一是基于计算机仿真的有限元分析法(Finite Element Analysis, FEA);其二为基于输入(激励)/输出(响应)模态试验模态分析法(Experimental Modal Analysis, EMA);其三是基于仅有输出(响应)模态试验的运行模态分析法(Operational Modal Analysis, OMA)。第一类属于结构动力学正问题,第二类与第三类属于结构动力学反问题。基于仅有输出(响应)的模态参数识别技术(OMA),因其无需增加特殊的激励设备,基本不影响结构的正常运行,对结构损伤小,测试费用低等优点,被广泛应用于土木工程领域[2]。
模态参数(固有频率、阻尼比、振型)识别是结构动力学特性分析、结构健康监测、损伤识别等方面的关键内容,特别是对于服役期桥梁健康监测,能否利用在线监测数据实时识别模态参数,对识别方法及算法提出来更高的挑战。随机子空间识别法(Stochastic Subspace Identification,SSI)以其输入参数少,可程序化程度高等优点受到国内外学者的热捧。SSI假定输入信号为随机白噪声,利用自然环境激励条件下进行结构模态参数识别,基于离散时间状态空间方程,直接处理时间序列的时域方法。比利时鲁汶大学的Bart Peeter等人提出基于数据的子空间识别的概念及思想,并把系统控制理论与矩阵理论联系起来,利用稳定图确定系统的阶次[3-4];福州大学任伟新教授团队提出基于稳定图的平均正则化稳定图算法,使得模态参数识别效率和识别精度得到提高,提炼出经验模式分解(EMD)的SSI,并应用于桥梁和建筑物等工程实例[5-6];同济大学的孙利民、张启伟、常军等人提出两阶段稳定图方法剔除虚假模态,消除模态遗漏现象,对Hankel矩阵中的“过去”输出数据缩减,以提高计算效率[7-8];重庆大学的章国稳、汤宝平课题组利用谱系聚类法实现模态参数的自动识别,依据模态能量水平剔除虚假模态,提出基于数据缩减的分频段小波变换模态参数快速自动识别[9];刘兴汉、王跃宇等人提出基于Cholesky分解的改进随机子空间识别法,通过对维数大大减少的Cholesky分解来得到投影矩阵,提高计算效率[10];此外,香港理工大学、东南大学、清华大学、西北工业大学等多所科研院校对SSI进行了深入的研究和探讨。
经过40余年的发展,国内外研究学者在SSI方法上取得很大成就,但是仍面临许多问题,特别是SSI方法的计算效率有待提高。基于数据驱动SSI方法,需要构造单无限大的Hankel矩阵,需要处理的数据非常庞大,并且涉及到高维QR分解和SVD分解,需要的时间和内存开销很大程度上影响了其在实际工程中的应用。针对以上问题,本文对基于数据驱动SSI方法进行优化,首先,以部分测点信息作为“过去”输出信号代替全部测点信号,精简Hankel矩阵中的“过去”输出数据Yp,减少计算量,针对文献[7]可能出现模态遗漏的问题,本研究通过基于模态置信度(Modal Assurance Criterion,MAC)的数据优化,有效避免模态遗漏。其次,通过公式推导,避开求解投影矩阵简化计算步骤,避免高维矩阵的分解和存储,改善计算机使用内存,提高计算效率。最后,以西宁北川河桥为工程实例,验证该优化算法的实用性和有效性。
1 结构振动的状态空间模型的计算法
结构振动微分方程为:

(1)
式中,M∈Rn×n,C∈Rn×n,K∈Rn×n分别为质量矩阵、阻尼矩阵、刚度矩阵;u(t)∈Rn为位移向量;F(t)∈Rn×l外部激励向量。
令

(2)
则式(1)可转化为:
(3)
引入观测方程:
(4)
式中,y(t)∈Rl×1为观测向量(l表示测点数);Ac∈R2n×2n为连续状态矩阵;Bc∈R2n×2n为连续时间输入矩阵;Cc∈Rl×2n为连续时间输出矩阵;Dc∈Rl×m为直馈矩阵。
自然环境激励通常为风、车辆或行人等,假定是理想的白噪声激励,并与输入噪声和输出噪声合并,将式(3)与式(4)离散化可得离散时间状态空间模型:
(5)
(6)
式中,yk∈Rl×1为第k(k∈N)个采样间隔(Δt)的输出向量;xk∈R2n×1为状态向量;A∈R2n×2n为离散状态矩阵;C∈Rl×2n为离散输出矩阵;E为数学期望算子,δpq为Kronecker Delta函数;wk∈Rl×1,vk∈R2n×1为测量噪声、过程噪声;Q∈R2n×2n,S∈R2n×l和R∈Rl×l为噪声序列wk,vk的协方差矩阵。
2 随机子空间优化算法
SSI可分为:基于协方差驱动随机子空间识别法(Cov-SSI)与基于数据驱动随机子空间识别法(Data-SSI),其基本原理都是以线性系统的最小实现理论为基础,利用Hankel矩阵与系统可观测性、可控制性矩阵的特殊关系求得系统矩阵A和输出矩阵C,在状态空间辨识系统的模态参数。SSI利用矩阵分析QR分解使得数据缩减,采用奇异值分解(SVD)剔除噪声干扰,运用最小二乘法来识别系统的状态矩阵,最后通过特征值分解直接确定结构模态参数:自振频率、阻尼比和振型。
2.1 构造Hankel矩阵
构造Hankel矩阵时,数据量很大(单无限),虽然现在计算机硬件得到很好的改善,但Hankel矩阵的QR分解会消耗计算机很大内存,计算耗时长。
2.1.1 基于MAC准则的数据优化
根据结构响应的特点,各个测点的输出信号都包含相同的频率信号—固有频率,由投影原理可知,所有的输出信号都可以单独或者部分组合作为被投影信号,即精简“过去”输出数据Yp,但是牺牲参与信息以减少计算量伴随有模态遗漏等问题。为避免各向量之间的交角偏小让系统遗漏关键模态的情况发生,MAC算法可以在选择测点数据时,使量测的模态向量保持较大的空间交角,增大模态向量的识别效果,尽可能地保留原模型的特性,模态置信度MAC矩阵(简称M阵)表达式如下:
(7)
式中,Φi和Φj分别为第i阶和第j阶模态向量。通过检查各模态在量测自由度上形成的向量M阵的非对角元,即可判断出相应两模态向量的交角情况。当M阵的某一元素Mij(i≠j)等于1时表明第i向量与第j向量交角为零,两向量不可分辨;而当Mij(i≠j)等于零时,则表明第i向量与第j向量相互正交,两向量可以轻易识别。故选择数据的测点布置应力求使M阵非对角元向最小化发展,一般建议非对角元最大取值为0.25[11]。
当从全部测点数据中删除k行,式(17)变为:
(8)
从已有测点数据里删除某点数据是一个反复迭代,不断寻优的过程,其根本目的是删除使M阵非对角元最大的测点数据。
2.1.2 构造数据精简的Hankel矩阵
从l个测量数据中选择r个作为“过去”输出数据,即:
(9)

(10)

构造Hankel矩阵:
(11)
式中,“过去”输出数据Yp∈Rri×j;“将来”输出数据Yf∈Rli×j。
2.2 Hankel矩阵QR分解
SSI通过QR分解对Hankel矩阵进行数据缩减:
(12)
式中,Q为正交矩阵:QTQ=QQT=I;R为下三角矩阵。
Yf向Yp的投影矩阵[7]:
(13)
定义可观测矩阵:
(14)
则投影矩阵Oi可表示为:
(15)
2.3 求解观测矩阵Γi
Data-SSI传统的计算方法,投影矩阵Oi贯穿整个计算过程,但是投影矩阵的列数与Hankel矩阵列数相同,依然是单无限,并且求解过程很复杂,如果能避开求解投影矩阵,不仅减少计算步骤,还能改善计算机内存,从而提高计算效率。
可观测矩阵Γi与投影矩阵Oi相关联,投影矩阵Oi又可用矩阵R21表示,如果能找到可观测矩阵Γi与矩阵R21的关系式,就可以避免求解投影矩阵,推导如下:
对矩阵R21进行奇异值(SVD)分解:
(16)
式中,U,V属于酉矩阵;S=diag(σ1,σ2,…,σn),σi为从大到小的全部非零奇异值。
则式(13)可表示为:
(17)
则可观测矩阵可表示为[7]:
(18)
至此,可观测矩阵Γi与矩阵R21的SVD分解建立关系,优化算法避免了求解投影矩阵Oi,Hankel矩阵QR分解时只存储下三角矩阵R,利用子矩阵R21的SVD分解求得可观测矩阵Γi。计算过程中避开了大矩阵的存储和分解(R21要比Oi小很多),并且不用存储正交矩阵Q,改善了计算机的使用内存,提高了计算效率。
2.4 求解系统矩阵A和C
定义观测矩阵Γi的两个子阵Γ1和Γ2:
(19)
系统矩阵A:
(20)
式中,(•)+表示矩阵的伪逆。
通过观测矩阵Γi求得系统矩阵A与C,实际工程应用中,在确定系统阶次时结合稳定图的方法计算不同的A,C从而识别系统参数。

图1 SSI优化算法流程图Fig.1 Flowchart of optimization algorithm by SSI
3 工程算例
本文采用与文献[7,13-14]相同的工程实例,中承式钢管混凝土系杆拱桥—西宁北川河桥为工程实例,便于比较计算方法的有效性。
3.1 工程概况
西宁北川河桥,净跨90 m,矢跨比1/5,拱轴线为悬链线,拱轴系数m=1.167;桥面净宽21.6 m,共16对吊杆;主拱圈采用4根φ650 mm×10 mm 钢管,内灌注C50混凝土,横梁采用C40钢筋混凝土,吊杆采用127×φ5高强碳素钢丝,水平系杆选用φ5高强钢丝束。
环境激励是利用自然风载、随机交通荷载或其他环境激励及其组合等,测量桥梁的动力特性,具有简单易行、不中断交通、对桥梁结构的损伤小、测试费用低等优点,应用越来越广泛。全桥上下游每侧布置竖向测点16个,共32个,位于每根吊杆下侧,一个固定参考点,位于桥面起始处,传感器横向布置如图2所示。全桥共分4组进行测试,每组8个测点,信号采样频率80 Hz。以20 Hz重采样、组成36行18 176列的原始数据。

图2 加速度传感器布置图Fig.2 Arrangement of acceleration transducers
3.2 数据优选
首先确定竖向弯曲振动特征作为有效振型,提取对桥梁的竖向振动有贡献的前4阶振型数据来考虑作为数据优选的原始数据,并将这4阶振型组成模态向量矩阵(模态向量选用文献[14]方法识别结果)。然后以全部测点为初始状态进行筛选,利用MAC法,依次删除使得MAC阵非对角元减少最小的测点数据,剩余测点数据为候选,反复迭代,逐步删除更多测点数据,直到满足预设值要求(即MAC阵非对角元小于0.05),并依次记录删除测点信息。最后,按照测点删除顺序反向排列测点数据,即最先删除测点排列到最后,保留测点排列前几行。最终优化测点布置方案如图3所示。

图3 优选测点方案Fig.3 Scheme of measuring point optimization
3.3 检验与对比分析
基于Matlab平台,使用C语言编写程序,识别桥梁结构的频率,以相同的标准:最小阶次取10,最大阶次取50;稳定点个数取15;判定标准:频率0.01、阻尼0.4、振型0.05。图4中连续曲线为平均正则化功率谱,峰值法提取的频率与SSI识别频率形成直观对比。
当r=4,i=50,无数据优选,即取前4个测点数据作为“过去”输出数据:Yp∈R200×18 176,Yf∈R800×18 176,形成的稳定图见图4(a)。
当r=8,i=50时:Yp∈R400×18 176,Yf∈R800×18 176,本文优化算法形成的稳定图见图4(b)。
文献[14]选用桥梁一侧全部的16个测点数据,无数据优选,i=50时:Yp∈R800×18 176,Yf∈R800×18 176,形成的稳定图见图4(c)。

图4 不同算法的稳定图对比Fig.4 Comparison of stability diagrams obtained by different algorithms
观察图4(a)第4阶频率(4.589)完全稳定次数只有9次,无法提取,形成遗漏。对比图4(a)与(b),前4阶频率完全稳定次数都有所增加,特别是第4阶频率全部完全稳定,将成为优势频率。观察图4(c)可知,文献[14]算法的第4阶频率(4.589)完全稳定次数12次,第一阶频率(2.014)完全稳定次数14次,如果要提取前4阶频率,稳定点个数标准应降低到12次。观察图4(b),本文优化算法前4阶频率完全稳定次数依次是:17,22,22,22,3个稳定图中都是最多。通过以上分析,r取值受到振型稳定的影响,不宜太低并且与选择的位置相关,本文优化算法通过数据优选有效地解决了此问题,避免了模态遗漏;在识别高阶次模态时,为避免形成更多的虚假模态,完全稳定次数的提高为判定标准提供更广的选择空间。
各文献及本文优化算法识别的频率如表1所示,对比各组数据,本文优化算法结构与其他方法差别不大,误差范围在5%以内。优化算法识别结果比较理想。优化算法的前4阶竖向振型如图5所示。
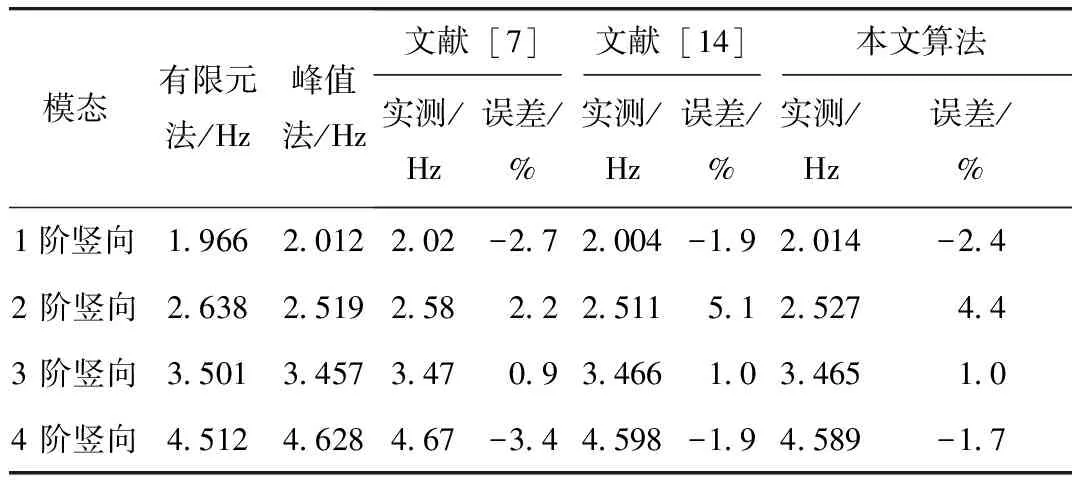
表1 频率对比表
注:1.误差=(有限元值-实测值)/ 实测值;2.有限元法和峰值法数据来自文献[13]。

图5 前4阶竖向振型图Fig.5 First 4 orders vertical model shapes
耗时方面,以下所有耗时均采用同一计算机:windous XP系统、3G内存。
如果Hankel矩阵j取5 000列,i取50块行,文献[14]算法需要14.641 s,本文优化算法仅需3.045 s,识别时间仅为前者的20.8%。如果Hankel矩阵的列取5 000固定不变,二者耗时对比如图6所示,随着块行数的增加,本文优化算法优势越来越明显,当块行数i大于120时,文献[14]的算法由于内存超界(out of memory)而无法计算。如果Hankel矩阵i取50不变,文献[14]算法的识别时间约是本文算法的5倍,如图7所示,并且当列数j大于12 500时,前者算法因内存超界而无法计算。观察图6、图7,块行i增加对识别时间的影响远远大于列j,识别时间随i呈指数增长,随j呈线性趋势增长;Hankel矩阵的行数为2li或者(r+l)i行,Hankel矩阵的大小对i的变化更敏感所致。
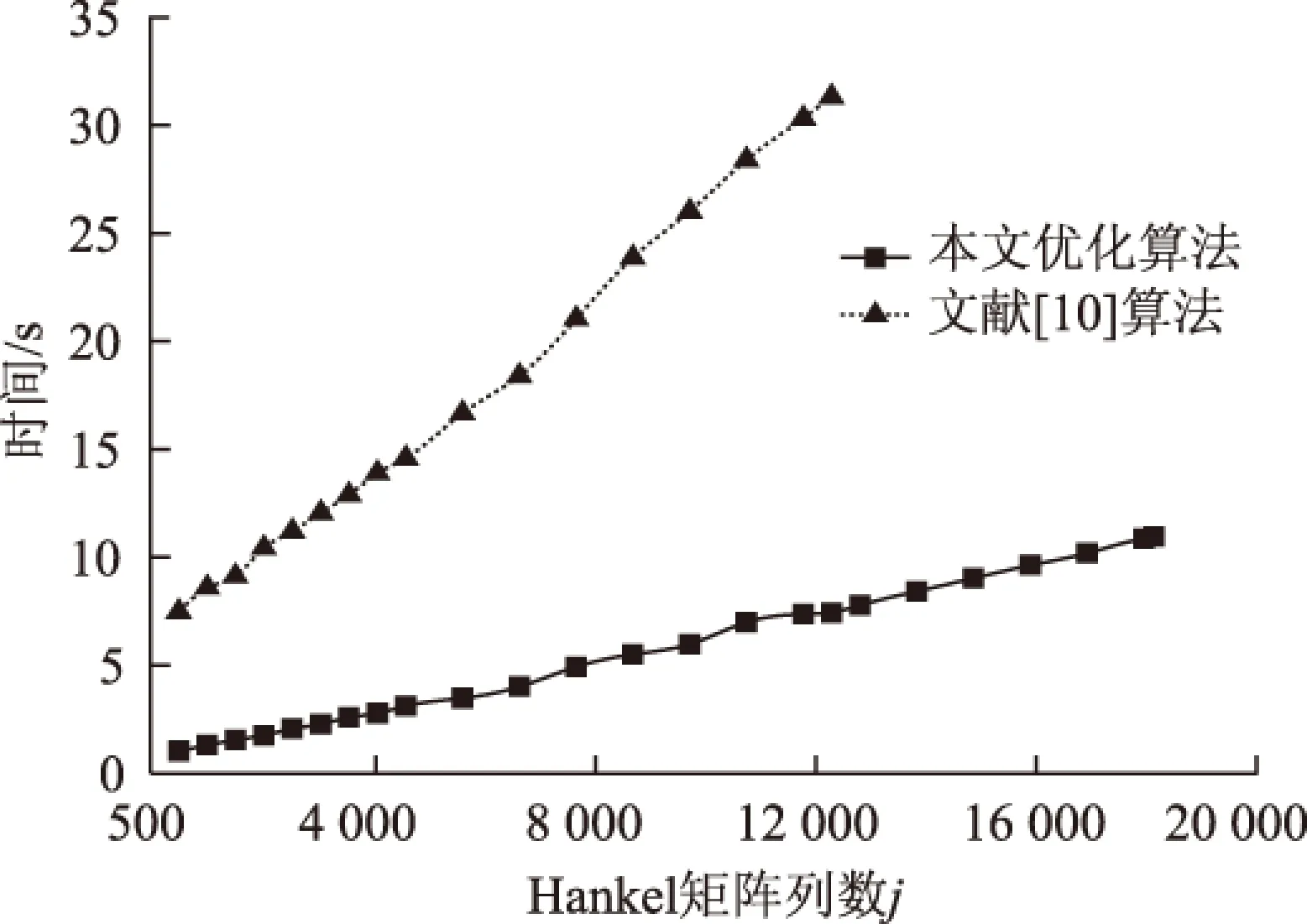
图7 i=50不变,时间随j的变化Fig.7 i=50, time varying with j
4 结论
本文推导了SSI优化算法,并通过工程算例分析及对比验证了其实用性和有效性。在稳定图中包含了平均正则化功率谱,相互校核,确保识别结果的可靠性,本文优化算法具有如下优点:
(1)通过MAC准则优化选取数据,缩减了Hankel矩阵的“过去”输出数据Yp,有效避免了由于数据减少带来模态遗漏;
(2)避开求解投影矩阵Oi,利用Hankel矩阵R21求得可观测矩阵Γi;
(3)计算过程中避开了高维矩阵的存储、QR分解和SVD分解,减少了计算量,并且不用存储正交矩阵Q,很大程度上改善了计算机的使用内存。
通过图6和图7可以明显看出,本文优化算法耗时更短,在相同计算机配置下,该算法处理的数据能力更强大,特别是对于梁拱组合桥、斜拉桥、悬索桥等需要处理海量数据的柔性结构,该算法更具优势。同时,由于识别速度快、方法稳定、精度高等优点,成为桥梁的健康监测、桥梁在线损伤识别和评估等领域更有力的工具。
[1] 陈伏彬,李秋胜. 基于环境激励的大跨结构动力特性识别[J]. 地震工程与工程振动, 2015,35(1):58-65. CHEN Fu-bin, LI Qiu-sheng. Identification of Dynamic Characteristics of Large-span Structure Based on the Ambient Excitation[J]. Earthquake Engineering and Engineering Vibration, 2015,35 (1): 58- 65.
[2] IVANOVIC S S, TRIFUNAC M D, TODOROVSKA M I. Ambient Vibration Tests of Structures-a Review[J].ISET Journal of Earthquake Technology, 2000,37 (4): 165-197.
[3] PEETER B, MAECK J, DE ROECK G. Reference-based Stochastic Subspace Identification for Output-only Modal Analysis[J]. Mechanical Systems and Signal Processing,1999, 13(6): 855-878.
[4] PEETER B, MAECK J, DE ROECK G. Excitation Sources and Dynamic System Identification in Civil Engineering[C]// Proceedings of European COST F3 Conference on System Identification and Structural Health Monitoring. Leuven: Catholic University of Louvain, 2000:341-350.
[5] 任伟新. 环境振动系统识别方法的比较分析[J]. 福州大学学报:自然科学版, 2001,29 (6): 80- 86. REN Wei-xin. Comparison of System Identification Methods Using Ambient Vibration Measurements[J]. Journal of Fuzhou University: Natural Science Edition, 2001,29 (6): 80- 86.
[6] 禹丹江,任伟新. 基于经验模式分解的随机子空间识别方法[J]. 地震工程与工程振动, 2005, 25(5): 63-68. YU Dan-jiang, REN Wei-xin. Empirical Mode Decomposition Based Stochastic Subspace Identification[J]. Earthquake Engineering and Engineering Vibration, 2005, 25(5): 63-68.
[7] 常军.随机子空间方法在桥梁模态参数识别中的应用研究 [D].上海:同济大学,2004. CHANG Jun. Bridge Modal Parameters Identification by Stochastic Subspace Method [D]. Shanghai: Tongji University, 2004.
[8] 常军,孙利民,张启伟. 随机子空间识别方法计算效率的改进[J].地震工程与工程振动,2007,27(3):88-94. CHANG Jun, SUN Li-min, ZHANG Qi-wei. Improvement in Stochastic Subspace Identification [J]. Earthquake Engineering and Engineering Vibration, 2007, 27(3): 88-94.
[9] 章国稳. 环境激励下结构模态参数自动识别与算法优化 [D].重庆:重庆大学,2012. ZHANG Guo-wen. Modal Parameter Automatic Identification and Algorithm Optimization for Structures under Ambient Excitation[D]. Chongqing: Chongqing University, 2012.
[10]刘兴汉,王跃宇. 基于Cholesky分解的改进的随机子空间法研究[J].宇航学报,2007,28(3): 608-612, 652. LIU Xing-han, WANG Yue-yu. Improved Stochastic Subspace Identification Based on Cholesky Factorization[J]. Journal of Astronautics, 2007, 28(3): 608-612,652.
[11]宗周红,孙建林,徐立群,等.大跨度连续刚构桥健康监测减速度传感器优化布置研究[J].地震工程与工程振动,2009,29(2): 150-158. ZONG Zhou-hong, SUN Jian-lin, XU Li-qun,et al. Study on Optimal Placement of Acceleration Sensors for Health Monitoring of a Long-span Continuous Rigid-frame Bridge [J]. Earthquake Engineering and Engineering Vibration, 2009, 29(2): 150-158.
[12]张凯院,徐仲,吕全义,等.矩阵论 [M].北京:科学出版社,2013. ZHANG Kai-yuan, XU Zhong,LÜ Quan-yi,et al. Matrix Theory[M]. Beijing: Science Press,2013.
[13]宗周红,Bijaya Jaishi,林友勤,等.西宁北川河钢管混凝土拱桥的理论和实验模态分析[J].铁道学报,2003,25(4):89-96. ZONG Zhou-hong, Bijaya Jaishi, LIN You-qin, et al. Experimental and Analytical Modal Analysis of a CFT Arch Bridge over Xining Beichuan River[J]. Journal of The China Railway Society,2003,25(4): 89-96.
[14]高俊亮,王国清,彭彦忠,等.改进的数据驱动的随机子空间算法在桥梁监测中的应用[J].河北工业大学学报,2012,41(6): 83-87. GAO Jun-liang, WANG Guo-qing, PENG Yan-zhong, et al. Application of Improved Data-driven Stochastic Subspace Algorithms in Bridge Monitoring [J].Journal of Hebei University of Technology, 2012,41(6): 83-87.
[15]章国稳,汤包平,孟利波.基于特征值分解的随机子空间算法的研究 [J].振动与冲击,2012, 31(7): 74-78. ZHANG Guo-wen, TANG Bao-ping, MENG Li-bo. Improved Stochastic Subspace Identification Algorithm Based on Eigendecomposition [J]. Journal of Vibration and Shock, 2012, 31(7): 74-78.
[16]王济,胡晓.MATLAB在振动信号处理中的应用 [M].北京:中国水利水电出版社,2006. WANG Ji, HU Xiao. Application of MATLAB in Vibration Signal Processing[M]. Beijing: China Waterpower Press, 2006.
An Algorithm for Stochastic Subspace Optimization Based on Data-driven and Application
XUN Jing-chuan1, HE Shuan-hai1,GAO Jun-liang2
(1. Key Laboratory for Bridge and Tunnel of Shaanxi Province, Chang’an University , Xi’an Shaanxi 710064, China;2. Beijing New Intelligent Transport Science and Technology Development Co., Ltd., Beijing 101100, China)
In order to improve the identification speed of stochastic subspace method, through reducing the “past” output data of the Hankel matrix with the MAC criterion optimized data and the method of simplifying the modal parameter identification step, the optimization algorithm in stochastic subspace is derived. It achieves the purpose of rapid identification by programming based on the Matlab platform. First, the “past” output data of the Hankel matrix is reduced and the mode omission is avoided effectively. Second,R21which is a sub matrix of Hankel matrix QR decomposition is analyzed in detail. The direct relationship between the observable matrix and the singular value decomposition of matrixR21is established, avoiding to solve the projection matrix. The result shows that (1) using partial data as a “past” output reduced the amount of calculation; (2) avoid solving the projection matrix simplified calculation procedure; (3) avoid storage and decomposition of the high dimension matrix greatly improved the memory of computer; (4) The recognition speed increased obviously, and the precision is consistent with other documents. In the end, the practicability and effectiveness of the optimization algorithm is verified by an engineering example of Beichuan bridge in Xining.
bridge engineering;optimization algorithm;numerical decomposition;stochastic subspace;matrix;modal parameter
2016-05-16
国家自然科学基金项目(50908017);中央高校基本科研业务费专项资金项目(201493212002);广东省交通运输厅科技项目(科技-2014-02-022)
荀敬川(1979-),男,河北曲阳人,博士,高级工程师.(762001366@qq.com)
10.3969/j.issn.1002-0268.2016.12.015
U441.3
A
1002-0268(2016)12-0093-08
猜你喜欢
机械设计与制造(2023年2期)2023-02-27
成都信息工程大学学报(2022年4期)2022-11-18
昆明医科大学学报(2022年3期)2022-04-19
汽车实用技术(2021年10期)2021-06-04
数学物理学报(2021年1期)2021-03-29
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
中国环保产业(2019年10期)2019-11-21
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
广西科技大学学报(2016年1期)2016-06-22
