
基于虚拟仪器技术的渔船超低温冷库制冷监控系统研究
2017-03-14 07:24徐旻晟王金锋
食品与机械 2017年1期
徐旻晟 谢 晶 王金锋
(1. 上海海洋大学食品学院,上海 201306;2. 上海水产品加工及贮藏工程技术研究中心,上海 201306)
基于虚拟仪器技术的渔船超低温冷库制冷监控系统研究
徐旻晟 谢 晶 王金锋
(1. 上海海洋大学食品学院,上海 201306;2. 上海水产品加工及贮藏工程技术研究中心,上海 201306)
为了解决金枪鱼渔船超低温制冷控制系统自动化程度低,监控效果不理想和监控条件恶劣等问题,提出采用虚拟仪器技术,基于LabVIEW平台设计开发了一套金枪鱼渔船超低温冷库制冷监控系统,实现了冷库机组数据的实时监测、数据及动态曲线的显示、数据的处理及保存、系统控制参数的设定、电子膨胀阀实时状态检测和电子膨胀阀控制及输出显示等功能。试验结果表明:该系统运行稳定,自动化程度高,测控及时准确,人机交互界面友好,操作简单,功能完善。
虚拟仪器技术;金枪鱼渔船;复叠式制冷;超低温
金枪鱼渔船在捕捞季节需要在海上进行长时间作业,金枪鱼在捕捞上船后需在第一时间经处理后送入-55℃以下的超低温冷库进行冷冻保藏,以保证鱼肉的新鲜[1]。传统的金枪鱼渔船超低温冷库制冷控制系统多采用继电器逻辑电路组成的控制器,这种控制方式自动化程度低,需要有人员现场监控和操作。由于工作环境恶劣,劳动强度大,容易造成调节滞后、误操作等问题,并且无法自动采集、保存数据,对机组运行状态进行分析[2]。考虑到渔船上空间紧张等因素,超低温冷库多采用单机双级活塞式压缩制冷系统,为达到节能减排的目的,国外一些学者[3-4]提出采用吸收式和吸附式制冷来回收利用渔船柴油机排除的大量废气余热,提供部分制冷量。在远洋渔业发达的国家,如美国、荷兰和日本等渔业渔船[5]将制冷系统监控信息,包括温度、压力值和系统报警信息等,整合到船只的自控系统中,方便船员监控管理。随着计算机技术的发展,传统仪器的测控系统因在数据处理、显示和存储等方面的局限性,正逐步被虚拟仪器技术所替代。虚拟仪器技术是利用高性能的模块化硬件,结合高效灵活的软件来完成各种测试、测量和自动化控制。相较于传统仪器,虚拟仪器具有功能强大、性价比高、开放性好、升级和复用便捷、操作方便等特点。倪汉华等[6-7]将虚拟仪器技术应用于渔船液压舵和渔船捕捞设备的测控中,获得了良好、准确的测控效果,同时利用LabVIEW平台编程,极大地降低了编程工作量,提高了系统开发的效率。Gonçalves C等[8]利用LabVIEW进行压强的实时数据采集,通过数值分析和试验,研究了一艘快速巡逻艇结构在不同负载下的静态强度和抗疲劳强度,基于LabVEIW平台的数据采集系统提供了方便准确的测量结果。段培永等[9]利用CAN总线技术,在LabVIEW平台上开发了一套吸收式制冷机分散式参数采集和控制系统,经实验验证表明该系统运行稳定、实时性好、抗干扰能力强。
本研究自行开发了一套基于LabVIEW平台编程,可用于金枪鱼渔船超低温冷库制冷系统等大多数冷库制冷及低温实验研究的计算机辅助测控系统,实现对制冷机组各测点压力、温度、电流、制冷量等参数的自动监测和记录,对机组异常情况的报警和处理,对机组、风机和电加热的启停控制,库温和蒸发器出口过热度的设定,以及对电子膨胀阀控制和仿真参数的调整。
1 系统硬件组成
金枪鱼渔船超低温冷库制冷系统构成和系统实物图见图1、2,该系统为复叠式制冷系统,高温级制冷剂选用R404A,低温级制冷剂选用R23,采用搁架式蒸发器,设计蒸发温度-65℃,制冷量5 kW,系统按照船用标准进行设计和搭建。针对要求的低温环境,电子膨胀阀选用美国HANSEN PXV电子膨胀阀,制冷剂温度范围-51~115℃。根据测控要求,该系统总共有17个温度测点、7个压力测点、1个制冷剂质量流量测点和6个电流测点,需要控制的参数包括库温和蒸发器出口过热度,电子膨胀阀的开度和控制参数。机组温度采用型号JWB/Pt100/C热电阻温度传感器测量,测温范围-200~1 600℃,库内测点采用PT100热电偶进行测量;压力测点采用Danfoss型号AKS 33-060G2112和AKS 33-060G2100压力传感器测量,测量范围-0.1~0.5 MPa;制冷剂质量流量采用EMERSON型号CMF200质量流量计测量,测量范围0~225 t/h(m3/h);电流采用多功能电力仪表测量。

1. 高温级压缩机 2. 高温级油分 3. 冷凝器 4. 高温级回热器 5. 高温级节流装置 6. 蒸发冷凝器 7. 高温级气液分离器 8. 低温级压缩机 9. 低温级油分 10. 低温级回热器 11. 低温级节流装置 12. 冷库风机 13. 搁架式蒸发器 14. 膨胀容器
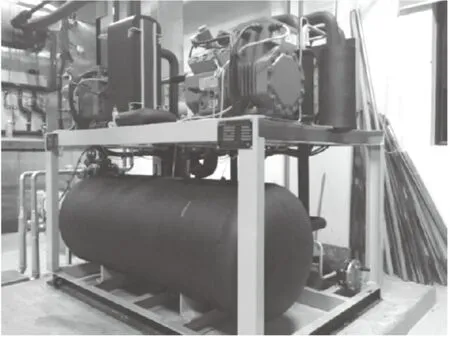
图2 超低温复叠式制冷系统机组部分实物图Figure 2 Image of cascade refrigeration system (Unit)
金枪鱼渔船超低温冷库制冷监控系统结构见图3,主要由采用虚拟仪器技术的上位机和基于PLC构建的下位机构成,两者通过通信协议完成通信,进行信号的相互传递。下位机选用SIMENS公司型号S7-300系列PLC(CPU315-2DP),可实现数据采集和向执行机构发送上位机指令等功能。上位机程序基于LabVIEW平台编写,实现对制冷系统的控制和对采集的数据处理和分析,上位机与下位机通过OPC(OLE for Process Control)通信协议PLC进行通信。系统的温度、压力、电流和质量流量信号经转换为对应的电信号,这些电信号经过放大滤波等处理后,经A/D转换由下位机PLC进行数据采集,采集的数据流通过通信协议传递给上位机程序处理,处理后由LabVIEW实时显示在人机交互界面上,并接受操作人员的控制指令。该系统具有可靠性高、处理速度快、体积小、适用于露天恶劣条件等特点,特别适用于金枪鱼渔船超低温制冷控制系统。
2 上位机软件设计
上位机程序使用的编程软件是美国国家仪器公司(National Instruments,NI)推出的虚拟仪器开发平台LabVIEW,它采用图形化的语言,数据流的形式,利用其完善的功能模块,配合多种硬件设备驱动功能,可以较容易地实现传统仪器难以完成的复杂功能,提供了实现仪器编程和数据采集系统的便捷途径。
上位机程序主要负责发送操作人员的控制指令,定时接收和保存下位机PLC返回的测量结果,并对下位机的状态进行监控,异常状态时向操作人员发出报警信号。数据采集以曲线的形式显示在操作界面上,系统的温度、压力、电流和制冷剂质量流量自动定时测量,同一类的不同的参数可以通过下拉菜单进行切换,测量数据能自动转换成Excel文件,方便后续查看和进一步的处理。

图3 监测系统架构图Figure 3 Architecture diagram of the monitoring system
系统的主要功能结构见图4,软件编写采用模块化的思想,将系统结构分为3个部分,系统状态模块,数据采集模块及电子膨胀阀控制和仿真模块。其中每个模块包含2个子模块,操作人员可通过主要操作界面完成数据的实时监测、数据及动态曲线的显示、数据的处理及保存、系统控制参数的设定、电子膨胀阀实时状态检测和电子膨胀阀控制和仿真输出显示。
2.1 系统状态模块
系统状态模块如图5所示,主要是用于实时显示超低温复叠制冷系统状态,报警显示,系统设备的启停以及关键参数的设定。
数据读取方面,通过LabVIEW提供的数据记录与监控(Datalogging and Supervisory Control,DSC)模块,根据实际制冷系统连接情况制作出形象的系统流程图,并在对应的位置放置显示控件,通过共享变量引擎(NI-PSP)绑定OPC服务器中的对应数据,刷新时间100 ms,在程序运行时即可实时显示对应各点的温度、压力等数据;在机组出现异常情况下,对应故障的报警灯闪烁,蜂鸣器持续鸣叫,以提醒操作人员对故障进行排查,故障解除后报警自动复位。
在数据写入方面,采用LabVIEW自带的Datasocket系列函数完成操作人员控制指令向下位机PLC的写入。以库温设定为例,如图6所示,通过Datasocket open、Datasocket write和Datasocket close函数,配合while循环,完成库温设定值的写入。操作人员可以根据预设目标进行库温的设定,操作人员可以通过该部分旋钮或下方输入控件直接输入库温的设定值,输入的范围定在-60~20℃,如超出这个范围,会直接设定在最接近值;机组、风机和电加热启停开关,出于安全考虑,需要操作人员手动开启风机,软件首先开启复叠式制冷系统高低温级的供液阀,再启动高温级压缩机,等待10~15 s后,再启动低温级压缩机;电加热用于模拟货物负荷和稳定库温,操作人员可在需要的时候进行开启。
2.2 数据采集模块
数据采集模块的主要操作界面见图7。使用LabVIEW的图表控件可以方便地对实时曲线进行操作,用鼠标选择各个图表左下角的工具按钮,可以获得相应工具的功能,包括图表的移动,所选范围数据的放大缩小等功能。操作人员可以通过单击下拉列表来选择显示在图表中的数据,分别为温度参数,库温测点和压力参数。被选中的参数在右侧显示“√”符号,并在相应的图表中显示实时的参数数据。
数据采集采用写入测量文件Express VI进行编写,以压力和电流为例,见图8。使用该函数可以将采集到的数据输出包括文本(LVM)、二进制(TDMS)、和Excel表格等4种格式,方便操作人员对数据做进一步的处理和分析。
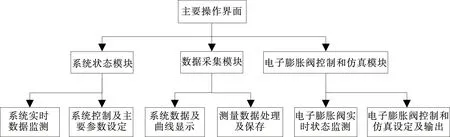
图4 监控系统主要功能模块Figure 4 Main functions of the monitoring system

图5 系统状态操作界面Figure 5 The interface of system state

图6 利用Datasocket函数写入库温设定值Figure 6 Write storage temperature set point with Datasocket

界面左上是温度显示曲线图,左下是压力显示曲线图,右上是选择显示参数的多项选择下拉菜单和数据采集的控制按钮,右下是制冷机质量流量显示
当操作人员需要进行数据采集时,可以通过点击右侧的数据采集按钮,按钮变绿,则进行采集,采集间隔30 s,采集的数据保存在对应的Excel表格中,操作人员可以通过弹出的对话框来选择数据保存的位置,操作人员可以在之后进行查看和进一步的处理。如果需要停止,则单击停止采集按钮,按钮变绿,同时数据采集按钮变暗。

图8 部分数据采集程序Figure 8 Data acquisition program
2.3 电子膨胀阀控制和仿真模块
美国HANSEN PXV脉宽调制(Pulse Width Modulation,PWM)电子膨胀阀采用电磁线圈控制开闭阀,脉冲宽度的调制信号周期为T0s,控制器输出信号是脉冲宽度,即一个高电平加载到电磁线圈上的持续时间T决定电子膨胀阀的开度大小,T=T0时对应的阀开度为100%,T=0.5T0时对应的开度是50%,T为0时对应阀处于关闭状态。这种控制方式逻辑简单,并且动态响应好,相较于常见的步进电机控制的电子膨胀阀,硬件成本和维护成本得到了大幅的降低,但控制精度还有待提高。
为了优化PWM的控制精度,本系统采用模糊控制进行电子膨胀阀控制的优化。以蒸发器出口过热度为控制目标,选取实际和目标过热度误差e(℃)和误差变化率ec(℃/s)为输入变量,电子膨胀阀一个周期内的开启时间ot(s)为输出变量。根据实际情况和仿真要求,误差e的实际论域为[-10,10],模糊化后为模糊语言变量E,模糊集合{NH,NB,NM,NS,Z,PS,PM,PB,PH},模糊论域{-5,-4,-3,-2,-1,0,1,2,3,4,5};误差变化率ec的实际论域为[-0.6,0.6],模糊化后为模糊语言变量EC,模糊集合{NB,NM,NS,Z,PS,PM,PB},模糊论域{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};开启时间ot的实际论域为[0,6],模糊集合{CB,CM,CS,H,OS,OM,OB },模糊化后为模糊语言变量OT,模糊论域{0,1,2,3,4,5,6}。根据专家知识和实践经验[10],用IF-THEN语句表达模糊逻辑推理控制规则:IF{误差E为NH}AND{误差变化率EC为NB}THEN{电子膨胀阀开启时间OT为OB};IF{误差E为NS}AND{误差变化率EC为PB}THEN{电子膨胀阀开启时间OT为CS}。诸如此类,模糊控制规则见表1。规则共63条,输入输出的隶属函数均采用高斯型隶属函数,去模糊化方法采用最大隶属度法。
电子膨胀阀控制和仿真模块的主要操作界面见图9。操作人员可以在这个界面上监测电子膨胀阀的运行状态、电子膨胀阀控制的输出和蒸发器出口过热度曲线,进行控制模式的选择以及相应的控制参数设定。在系统未接入电子膨胀阀时,还可以进行电子膨胀阀仿真控制,包括各个参数的设定和相应的输出曲线的显示。

表1 模糊规则控制表Table 1 Rules of fuzzy logical control

图9 电子膨胀阀控制和仿真操作界面Figure 9 The interface of control and simulation of electronic expansion valve
在未接入电子膨胀阀或需要进行预试验时,系统提供了电子膨胀阀的仿真控制,包括仿真控制参数的设定和输出曲线的显示。本系统提供了两种控制算法的仿真:PID控制器和模糊控制器。地址栏内需要操作人员选择编写好的Fuzzy控制.fz文件。“SP”为仿真控制过热度的设定值。右侧3个值分别为P值、I值、D值,操作人员可根据经验进行设定。“ST”为仿真持续的时间值。模糊因子和解模糊因子为Fuzzy-PID控制的设定参数,操作人员可以根据自己的设计进行修改,采用Fuzzy控制算法来优化PID控制器的KP、KI和KD3个参数。PID控制和Fuzzy-PID控制的输出曲线可以在右侧两个图表中获得。
3 验证实验结果与分析
3.1 数据采集和处理
为了验证监控系统的性能以及可靠性,进行了模拟负荷降温实验。采用4个电加热模块进行负荷模拟,每个电加热模块的功率为1.5 kW,可进行0~100%无级调节。为了使模拟负荷均匀分布在库内,将4个电加热模块分别安装在4个冷风机的出风口,通过风机的强制对流作用,将热量及时、均匀地分散到搁架式蒸发器上。
实验前,保持库温在15℃。打开冷却水开关,保证冷却水路通畅。首先启动冷库内冷风机,开启电加热模块,调节每个电加热模块为30%的加热量,即总共1.8 kW的模拟热负荷。启动高温级压缩机,等待15 s后,启动低温级压缩机。每隔30 s记录一次数据,直至降到-60℃,数据被保存至指定的Excel表格内。在获得数据后,每5 min取一个数据点,进行后续数据分析。图10为模拟负荷实验自动采集到的压力数据曲线,图11为模拟负荷实验温度曲线图。

图10 模拟负荷实验压力数据Figure 10 Simulated load experiment pressure data

图11 模拟负荷实验温度变化曲线Figure 11 Simulated load experiment temperature curve
实验记录数据显示,模拟负荷实验的整个降温过程共用时5.5 h。在降温过程中库内温度稳步下降,库内温度,蒸发器进、出口的温度变化趋势较为平缓,低温级冷凝温度和低温级蒸发器进口温度在实验中略有波动。系统运行过程中,性能稳定,提高了数据采集的准确性和实时性,采集后的数据处理方便,减轻了后续数据分析的负担,高度自动化的监控系统有效地提高了金枪鱼渔船冷库监控的工作效率。
3.2 电子膨胀阀控制仿真
仿真时间设置为1 000 s,步长1 s,采样周期取2 s。PID控制器的参数整定采用临界比例法,获得参数初始值分别为:KP=30.03,KI=0.429,KD=300,仿真系统输入信号为10℃的过热度阶跃信号,分别使用PID控制器和Fuzzy-PID控制器进行电子膨胀阀控制仿真,得到的控制器响应曲线见图12。由于数据采集设备性能、自然环境因素等诸多原因的干扰,实际控制过程的输入信号中往往会带有一定的随机波动,为了获得控制器在实际控制情况下的控制效果,同样的条件下,采用在阶跃信号中加入高斯噪声来仿真实际输入信号,获得的控制器响应曲线见图13。同时,实际控制过程中,系统的元件参数变化以及外来的未知扰动等都会影响控制器的控制效果,为了验证控制器在受到扰动的情况下自动修正控制量出现偏离的能力,同样条件下,在350 s加入一个幅值为2,持续时间30 s的锯齿波,用于仿真实际控制过程中由于参数变化带来的扰动,获得的控制器响应曲线见图14。
在输入信号未加入噪声的情况下,采用PID控制的阶跃响应超调量为60%,调节时间(2%误差带)为310 s;采用模糊PID控制的阶跃响应超调量在25%,调节时间(2%误差带)为215 s。在加入高斯噪声后,采用PID控制的超调量达到了68%,调节时间(5%误差带)为350 s;采用模糊PID控制的超调量在23%,调节时间(5%误差带)为210 s。在加入锯齿扰动后,PID控制器20 s后得到响应,进行调整,过热度波动为0.9℃,调节时间(2%误差带)为40 s;模糊PID控制器对扰动的响应延迟更大,但过热度波动更小,约为0.5℃,调节时间(2%误差带)90 s。

图12 采用PID控制器和模糊PID控制器过热度响应曲线Figure 12 Superheat response curve of PID controllerand Fuzzy-PID controller

图13 加入高斯噪声后PID控制器和模糊PID控制器过热度响应曲线Figure 13 Superheat response curve of PID controllerand Fuzzy-PID controller with Gaussian noise

图14 加入锯齿扰动后PID控制器和模糊PID控制器过热度响应曲线Figure 14 Superheat response curve of PID controllerand Fuzzy-PID controller with saw-tooth disturbance
根据仿真实验结果可知,采用PID控制器阶跃响应超调量较大,在加入噪声之后,PID控制器的稳定性较差,受扰动的影响较大,但响应能更快回到稳定状态;采用模糊PID控制器能够获得更小的超调量,系统鲁棒性更好,稳定性强,受扰动的影响更小,但响应的调节时间更长。
4 结论
本研究采用虚拟仪器技术,基于LabVIEW平台设计开发了一套金枪鱼渔船超低温冷库制冷监控系统,进行了低温冷库模拟负荷降温试验,并通过LabVIEW仿真模块进行了电子膨胀阀控制仿真。
验证实验表明:① 虚拟仪器技术应用于制冷控制系统运行稳定可靠、操作简单便捷、测试结果准确,控制及时迅速,后期数据分析处理方便直观,能够降低冷库管理的人工成本投入,对节能、减轻劳动强度有实际意义;② 相较于传统PID控制器,模糊PID控制器在电子膨胀阀控制系统超调量和抑制外界扰动方面有明显的优势,但调节时间显著长于PID控制器。今后可针对优化模糊PID控制的响应调节时间进行进一步的研究;③ 电子膨胀阀的控制仿真中,默认系统传递函数不变,但在实际应用中,制冷剂流量变化时,蒸发器出口过热度对电子膨胀阀的开度响应会发生改变,控制器性能也会有所降低,如果能够通过构建控制目标的数学模型来建立模糊控制系统,则会更加接近实际应用的工况,对电子膨胀阀控制的研究更加深入。
[1] 郭耀君, 谢晶, 朱世新, 等. 超低温制冷装置的研究现状和进展[J]. 食品与机械, 2015, 31(1): 238-243.
[2] 谢晶, 徐旻晟, 王金锋, 等. 一种金枪鱼渔船余热回收喷射式自复叠制冷系统, 中国: CN105627622A[P]. 2016-06-01.
[3] TAMAINOT-TELTO Z, METCALF S J, CRITOPH R E, et al. Carbon-ammonia pairs for adsorption refrigeration applications: ice making, air conditioning and heat pumping[J]. International Journal of Refrigeration, 2009, 32(6): 1 212-1 229.
[4] FARSHI L G, FERREIRA C A I, MAHMOUDI S M S, et al. First and second law analysis of ammonia/salt absorption refrigeration systems[J]. International Journal of Refrigeration, 2014(40): 111-121.
[5] TORRES-IRINEO E, GAERTNER D, CHASSOT E, et al. Changes in fishing power and fishing strategies driven by new technologies: The case of tropical tuna purse seiners in the eastern Atlantic Ocean[J]. Fisheries Research, 2014(155): 10-19.
[6] 倪汉华, 徐志强, 谌志新. 基于LabVIEW的渔船液压舵机试验台研制与应用[J]. 渔业现代化, 2010(4): 45-48.
[7] 倪汉华, 徐志强, 羊衍贵, 等. OPC技术在渔船捕捞设备测控系统中的应用[J]. 渔业现代化, 2012(6): 62-65.
[8] GONÇALVES C, MARTINS R F, ALMEIDA R, et al. Static and fatigue behavior of the main section of a fast patrol boat[J]. Procedia Engineering, 2014(74): 161-164.
[9] 段培永, 刘桂云, 段晨旭, 等. 基于LabVIEW和CAN总线的吸收式制冷机组数据监控系统[J]. 计算机系统应用, 2015(4): 103-107.
[10] LI H, JEONG S K, YOU S S. Feedforward control of capacity and superheat for a variable speed refrigeration system[J]. Applied Thermal Engineering, 2009, 29(5): 1 067-1 074.
Refrigeration monitoring system of ultra-low temperature cold storage onfishing boat based on virtual instruments
XU Min-shengXIEJingWANGJin-feng
(1.CollegeofFoodScienceandTechnology,ShanghaiOceanUniversity,Shanghai201306,China; 2.ChinaShanghaiAquaticProductsProcessingandStorageEngineeringTechnologyResearchCenter,Shanghai201306,China)
There are several problems in the ultra-low temperature refrigeration control system on the tuna fishing boat, including the low degree of automation, unsatisfactory monitoring effect and poor monitoring conditions. In order to solve these problems, a tuna fishing boat ultra-low temperature cold storage refrigeration monitoring system was designed and developed by using the virtual instrument technology, based on LabVIEW. This system achieved a real-time monitoring, and displayed a unit’s data and dynamic curves. Moreover, it also included a data processing and storage, a control parameter settings, an electronic expansion valve real-time status monitoring, a valve control and an output display. The experimental results indicated that this system could be operated stably and automatically, and used to get detection timely and accurately, with a friendly human-machine interface.
tuna fishing boat; cascade refrigeration; cryogenic; monitoring; virtual instruments; LabVIEW
国家“十三五”重点研发项目课题(编号:2016YFD0400303);上海市科委平台能力提升项目(编号:16DZ2280300)
徐旻晟,男,上海海洋大学在读硕士研究生。
谢晶(1968—),女,上海海洋大学教授,博士,博士生导师。E-mail:jxie@shou.edu.cn
2016-09-05
10.13652/j.issn.1003-5788.2017.01.029
猜你喜欢
今日农业(2022年15期)2022-09-20
特种结构(2021年6期)2021-12-31
特种结构(2021年6期)2021-12-31
家禽科学(2020年8期)2020-10-09
制造技术与机床(2019年4期)2019-04-04
老年教育(老年大学)(2019年9期)2019-01-13
电子制作(2017年13期)2017-12-15
电子制作(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
电源技术(2016年9期)2016-02-27
