浅谈数控机床防碰撞保护方法
2017-04-10 11:23宋福林
长沙航空职业技术学院学报 2017年1期
宋福林
(长沙航空职业技术学院,湖南 长沙 410124)
浅谈数控机床防碰撞保护方法
宋福林
(长沙航空职业技术学院,湖南 长沙 410124)
以FANUC数控系统为例,分析数控机床防碰撞保护常用的方法,说明通过FANUC系统的伺服异常负载检测功能实现防碰撞保护功能的具体调试步骤,以及进一步保护的措施并在实际中应用与验证可行。
数控机床;防碰撞保护;伺服;异常负载检测
随着我国制造业的快速发展,我国对数控设备需求也急剧增长,尤其是近年航空制造产业高速增长,在航空制造企业中数控设备也越来越普及,航空类零件通常形状复杂、加工精度要求高,高端数控机床以其高柔性、高精度及高效率,得到了广泛的应用,成为航空制造加工中最重要的设备,但高端数控机床的价格不菲,而且其维修备件的成本高,尤其是机床的高精密的主轴部件的维修成本越来越受到企业的重视。如何降低数控机床维护的的维修维护成本,尤其是降低机床操作者的失误造成的碰撞,而引发的非常规维护成本,成为数控机床维修维护人员的一项新兴的课题。
目前数控机床防碰撞措施通常采用以下两种方法:1)首件试切法,即在成批量零件的首件加工时,从该零件装夹直到最终零件加工结束,期间所有的环节,包含工件装夹找正、刀具装夹、对刀、程序校验以及零件每道工序的加工过程等等,每完成一项都需要反复确认是否正确,以保证加工安全。2)机床行程限位保护法,即根据不同大小的零件和不同长短的刀具,通过设置机床行程限位保护参数来限制机床的行程,以降低机床碰撞的概率。以上两种方法对机床操作者要求除了掌握数控机床的操作方法,还需要熟悉零件的工艺、编程以及数控机床的参数设置,大部分的操作工都无法根据不同的情况去调整,所以无法有效的解决碰撞的难题以及如何减少机床碰撞造成的损失,只能是降低机床碰撞的几率,不能从根本上解决问题。
本文结合上述预防措施的优缺点采用FANUC数控系统的伺服异常负载检测功能来实现对机床保护,该方案不但在零件的编程和数控机床的操作错误时能对机床进行保护,还能对数控加工过程中因刀具磨损等其他因素产生的伺服异常负载起到保护作用,有效地避免了机床加工过程中不可预料碰撞的发生,降低了机床维修成本。

图1 FANUC伺服系统外力干扰负载工作原理
1 数控机床伺服异常检测功能的原理
如图1所示,FANUC伺服系统的高速采样周期对施加到电机上的外力干扰负载扭矩进行实时地观测和计算,在机床发生碰撞的时候,伺服电机承受的外力扭矩突然增大,伺服系统将此时电机承受的外力扭矩与在系统内部设置的碰撞发生时机床能够承受的外力扭矩的最大值相比较。如果小于设置的外力扭矩的最大值,系统正常运行。如果大于设置的外力扭矩的最大值,伺服系统产生报警,同时伺服系统向伺服电机发出指令,使伺服电机向相反的方向运动, 机械系统与工件碰撞面脱离,从而对机床起到保护作用。
2 数控机床防碰撞功能的实现
FANUC系统在设计是提供了机床的异常负载检测功能,但是不同的机床的负载情况都不一样,这就需要数控机床厂家根据不同的数控设备来匹配相应的数据,来保护机床。FANUC系统异常负载检测功能使用系统的观测增益功能参数来区分正常负载与异常负载的,再通过FANUC系统的异常负载报警功能参数来实现报警和保护机床。具体操作步骤如下:
1)接通系统电源,将2016号参数的第0位ABNT设置为“1”,即伺服电机异常检测功能有效。
2)调整数控系统2047号参数,即伺服电机的观测器POA1参数。如图2所示在数控机床正常切削加工时,通过FANUC系统自带伺服电机波形诊断功能来观测电机和外力干扰的推测值,根据不同的机床要一边观测加速时和减速时的外力干扰推测的波形,来找出超程和欠程最少的POA1数值,并设置到2047号参数中[1]。
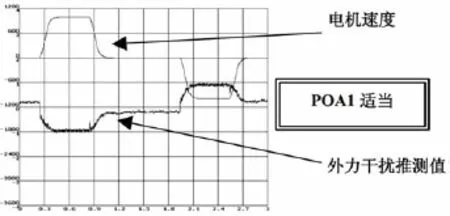
图2 FANUC伺服电机波形诊断
3)异常负载检测报警水平的设定。观测在进行各类操作,如切削加工时、快速移动时、进给轴加减速等状态时正常负载推测值,测出其最大值(绝对值),并将改值设置到系统2104号参数[2]。
设定值=|电机负载最大值|/放大器最大电流值×7282+500~1000左右
4)设定异常负载检测时的返回量。在机床发生碰撞时,为了保护机床的机械进给部件不受损伤,使机械进给部件回退一定距离,起到保护作用。我们需要对“异常负载检测时的返回量”2013号参数进行设置,此值设定根据加工时具体情况而定,标准设定为3mm。如果设置为0,表示在碰撞发生后,伺服电机停止运行。
3结论
使用异常负载监测功能实现防碰撞保护,通过在我单位数控机床中应用证明:此方法可靠高,成本低,容易推广,避免了数控机床机械部件和数控系统的损伤,大大降低了机床维修费用,提高了经济效益。若更进一步FANUC系统还可以通PMC梯形图程序的读窗口功能指令(如图1),来读取机床伺服电机的负载扭矩数据,通过对机床PMC程序的二次开发来实现切断NC急停信号等功能来进行进一步的保护。
[1] FANUC机电有限公司FANUC伺服参数说明书[M].北京:北京FANUC机电有限公司,2006:197-207.
[2] 北京发那科机电有限公司.FANUC CNC伺服调整培训教程[M].北京:高等教育出版社,2011:102-110.
[编校:杨 琴]
Anti-collision Protection Method of Numerical Control Machine Tool
SONG Fu-Lin
(Changsha Aeronautical Vocational and Technical College, Changsha Hunan410124)
This paper, with FANUC CNC system as an example, analyses anti-collision protection methods of common CNC machine tool, and studies specific debugging steps by FANUC servo system abnormal load detection function to achieve of anti-collision protection function, and further measures of protection. It shows their application in practice is feasible.
numerical control machine;anti-collision protection;servo;abnormal load detection
TH17
A
1671-9654(2017)01-0083-03
10.13829/j.cnki.issn.1671-9654.2017.01.022
2016-12-15
宋福林(1984-),男,福建莆田人,讲师,研究方向为数控技术。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
微特电机(2020年11期)2020-12-30
南京大学学报(数学半年刊)(2020年1期)2020-03-19
测控技术(2018年12期)2018-11-25
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
工业设计(2016年6期)2016-04-17
北京航空航天大学学报(2016年4期)2016-02-27
小雪花·成长指南(2015年5期)2015-05-25
弹箭与制导学报(2015年1期)2015-03-11