游艇燃料电池混合动力系统的模糊逻辑控制策略研究
2017-04-22 08:04潘朝峰邱广庭
船舶 2017年2期
臧 壮 潘朝峰 陈 宁 邱广庭
(江苏科技大学 能源与动力学院 镇江212003)
船舶电气与通信
游艇燃料电池混合动力系统的模糊逻辑控制策略研究
臧 壮 潘朝峰 陈 宁 邱广庭
(江苏科技大学 能源与动力学院 镇江212003)
文章针对内河及湖泊小型游艇,采用燃料电池和蓄电池组并联结构作为游艇混合动力系统,设计相应的模糊逻辑控制策略对能量进行管理,运用MATLAB/Simulink软件搭建燃料电池游艇混合动力系统及模糊逻辑控制器的仿真模型。仿真结果表明,混合动力系统及其模糊逻辑控制策略能够实现游艇航行中的能量控制,并且满足节能减排的要求。
燃料电池;混合动力游艇;电力推进;模糊逻辑控制
引 言
目前的游艇主要使用柴油机驱动,需要配置一套单独的发电装置,效率和费用大大增加。同时,游艇普及会给周边环境带来污染,尤其是当游艇在市区内航道航行时,会对河道周边的环境和居民生活带来无法忽视的影响。为此,《海洋环境保护法》、《水污染防治法》、《环境噪声污染防治法》、《海上交通安全法》和《内河交通安全管理条例》等法律、法规均对游艇污染作了相关规定。在全球能源逐年紧缺的局势下,如何提升游艇的节能环保性以及舒适性显得尤为重要[1]。氢气具备清洁无污染、热值高、利用率高等特点,近年来氢燃料电池技术不断进步,使氢在游艇上的应用已成为可能。但是,燃料电池系统动态响应较慢,输出特性无法满足游艇在启动、加速等工况时的功率需求,因此需要引入辅助能源来补偿功率波动、提高峰值功率。
目前用作燃料电池辅助电源的主要有超级电容器、蓄电池等。辅助电源的加入让混合动力系统的结构更加复杂,并增加了系统能量管理的难度。国内外学者对燃料电池混合动力系统的能量控制策略进行了研究 。应用最广泛的混合动力能量管理方法是基于规则的控制策略,本质是通过研究其系统,根据工程经验表述成计算机能够处理的简单推理规则,利用逻辑判断来实现混合动力系统工作模式切换及功率分配[2]。相比于经典逻辑控制策略,模糊逻辑控制策略对于非线性、复杂对象具有鲁棒性好、控制性能好、对参数不敏感等优点,在交通领域和工业控制中得到广泛应用[3-4]。本文根据内河小型游艇功率变换频繁的航行特点以及内河游艇巡游、高速航行等工况的特点,采用燃料电池混合动力系统代替传统燃油驱动和发电,并且研究设计了维持蓄电池较高储存能量以及燃料电池较高输出效率的模糊逻辑控制策略,同时进行了建模仿真加以验证。
1 混合动力系统结构组成与工作模式分析
游艇的燃料电池混合动力推进系统结构组成包括:质子交换膜燃料电池、蓄电池组、DC-DC变换器、DC-AC逆变器、能量管理系统和推进电机。其中燃料电池作为主要推进动力,蓄电池组作为辅助动力提供峰值功率。燃料电池发出直流电经DC-DC变换升压到直流母线电压,再由DC-AC逆变装置逆变为推进电机所需的三相交流电,蓄电池组直接与直流母线连接通过电池管理系统进行充放电控制。
燃料电池游艇在航行过程中主要有三种工作模式,纯燃料电池推进、燃料电池和蓄电池并联推进、纯蓄电池组推进三种工作模式。图1(a)和(b)为纯燃料电池模式,当游艇处于巡航时,航行需求功率波动相对较小并且介于燃料电池输出功率的最大值与最小值之间,此时燃料电池功率能够满足游艇负载要求,若当前蓄电池SOC(State Of Charge,简称SOC)值低于设计值,通过控制开关同时为蓄电池组充电。图1(c)为燃料电池和蓄电池并联模式,当游艇处于启动、加速、转弯等工况时,由于燃料电池的输出特性疲软不能很好地跟随功率突变,在接收到启动、加速等航行指令时,燃料电池保持在功率输出高效区域,不足功率由蓄电池提供,满足航行负载需求。图1(d)为纯蓄电池组模式,当游艇处于低速或停止工况,全船需求负载低于燃料电池最低输出功率,且蓄电池电量充足时,则燃料电池停止工作,由蓄电池提供能量满足全船负载。

图1 燃料电池游艇混合动力系统三种工作模式
2 混合动力系统模糊逻辑控制策略设计
燃料电池的输出特性如图2所示,可以看出燃料电池的输出电压随着电流密度的增大而减小,燃料电池输出特性疲软,无法独立应对游艇航行过程中功率突变情况。这就要求辅助蓄电池剩余电量维持在较高值以使得游艇可以随时切换成混合推进模式或纯蓄电池组推进模式,以适应游艇航行过程中发生功率突变的情况。

图2 燃料电池输出特性曲线
模糊逻辑可以同时有若干个输入参数,并按照一定的方法生成多种模糊规则,达到控制目的[5]。本文选取游艇实际航行中的需求功率Preq和蓄电池组剩余电量SOC值bSOC作为模糊逻辑控制器的两个输入变量,选取DC-DC变换器前端参考功率(即燃料电池功率)信号K作为模糊逻辑控制器的输出变量。模糊逻辑控制系统框图如图3所示。

图3 模糊逻辑控制系统框图
2.1 输入输出量确定及其模糊化
根据游艇混合动力系统各部件参数及航行环境,其最大需求功率设计为18 kW。燃料电池额定输出功率为15 kW,最大输出功率为18 kW,则模糊逻辑控制器两个输入一个输出变量的物理论域范围分别为:
大多数情况下,模糊控制器输入量的物理论域与模糊论域不同,需要通过量化因子模块进行系数变换,选取量化因子如下:

通过量化因子的选取,得到模糊逻辑控制器输入量和输出量的模糊论域全部为[0 1]。本文将游艇航行需求功率Preq划分七个模糊子集{零,正很小,正小,正稍小,正中,正较大,正大},用英文符号表示为{ZE,SS,PS,S,PM,B,PB}。蓄电池组bSOC划分为3个模糊子集{低,中,高},用英文表示为{L,M,H}。根据蓄电池的充放电特性[6],bSOC维持在0.5~0.7时,能够保持较高的电量和较大的开路电压,所以选取bSOC中间值为0.6。DC-DC变换器前端参考功率信号K划分为7个模糊子集{关闭,关闭平均保持,平均,平均中等保持,中等,中等最大保持,最大},用英文符号表示为{OFF,HOA,AVE,HAM,MED,HMM,MAX}。
2.2 隶属度函数选取
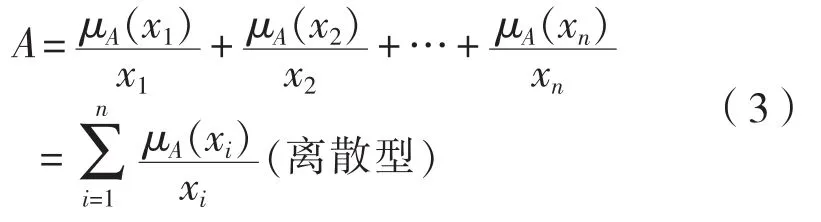
隶属度函数是模糊逻辑控制与实际工程问题相结合的基础,也是设计模糊逻辑控制器的关键所在。如果集合A的论域为X,A的元素为x,x属于A的程度由隶属度函数映射为0与1之间的某一隶属度μA(x),则隶属度函数表示为

在通常的情况下,越接近系统平衡点,隶属度函数选取越陡峭,控制灵敏度就越高;越远离系统平衡点,隶属度函数选取越平缓,调节时间就越快。本文选取三角形和梯形相结合的隶属度函数,则模糊逻辑控制器的输入量和输出量的隶属度函数分别如图4—图6所示。

图4 输入变量Preq的隶属度函数

图5 输入变量bSOC的隶属度函数
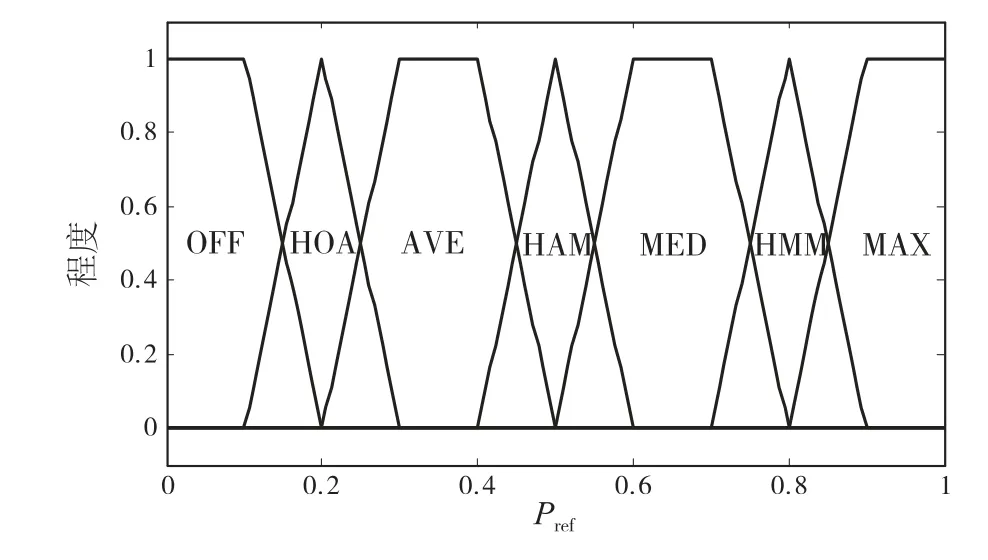
图6 输出变量K的隶属度函数
2.3 规则库的设计
模糊规则是模糊逻辑控制器的重要组成部分,在设计模糊规则时,需要结合控制的目的,考虑控制规则的完备性、交叉性和一致性[7-8]。模糊逻辑控制规则需满足以下几点要求:
(1)保证游艇航行的功率需求;
(2)减少燃料电池动态负荷,提高燃料电池的工作效率;
(3)维持蓄电池SOC值在期望值附近,允许小范围波动,保证蓄电池的使用寿命。
根据实际操作经验总结和经过多次调试,最终确定21条规则,其模糊推理形式为:If Preqis“Ai”and bSOCis“Bi”Then K is“Ci”,所有控制规则如表1所示。
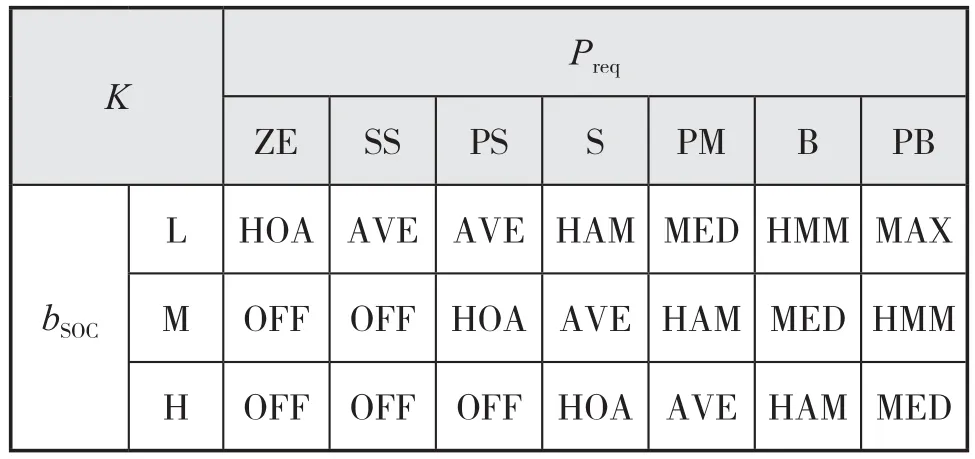
表1 模糊逻辑控制规则表
本文采用Mamdani推理方法进行模糊关系推理,经模糊推理后,采用面积中心法清晰化,即

式中:ucen为清晰化后输出值;u为模糊值;A(u)为u对应的隶属度函数;Z为u所在论域。
则模糊逻辑控制策略输入输出曲面如图7所示。

图7 模糊逻辑控制策略曲面
3 仿真分析
3.1 参数设置
为了验证该模糊逻辑控制策略的有效性和正确性,在Matlab/Simulink软件环境下搭建混合动力游艇的动力系统模型,关键部件的具体参数如表2所示。

表2 仿真实验参数
模糊逻辑控制器仿真框图选用带有规则观测器的模糊逻辑控制器,利用simulink中的模糊推理S函数得到可由Simulink使用的MEX文件,将所设计的模糊逻辑控制策略应用到整个动力系统仿真实验中。此外,为了保证燃料电池时刻保持在高效的工作区域内,需要对DC-DC变换器前端参考功率及功率变化率进行限制,有

式中:Pfcmin为燃料电池的最小输出功率;Pfcmax为燃料电池的最大输出功率;Pfcscope为燃料电池的输出功率最大动态变化率。
在simulink环境下建立的模糊逻辑控制策略的仿真模型如图8所示,游艇需求功率和蓄电池SOC值作为输入,通过模糊逻辑控制器模块得到DC-DC变换器前端参考功率K,经过开关控制模块最终得到燃料电池输出功率Pref和蓄电池的输出功率Preb。

图8 模糊逻辑控制策略仿真模型
3.2 仿真结果
选取游艇在某内河航行1 200 s内实际所需功率,如图9所示。游艇开始以低功率启动航行,到100 s附近开始加速,并以15 kW功率高速航行,整个航行阶段船速变化频繁,主要目的是能够考察能量管理策略在各个功率需求情况下的正确性和有效性,在700 s时需求功率达到最大值18 kW。

图9 混合动力游艇需求功率曲线
为了维持燃料电池始终工作在高效区域,设定燃料电池电池最大输出功率为15 kW,即燃料电池额定输出功率,最低输出功率不低于5 kW。燃料电池输出功率变化曲线如下页图10所示,燃料电池输出功率较平稳,需求峰值功率由蓄电池放电补充,此时,蓄电池SOC值(剩余电量)明显下降;需求功率下降时,此时燃料电池仍然维持高效工作模式,超出功率为蓄电池充电,此时蓄电池SOC值开始上升并稳定在60%附近。蓄电池充放电功率变化曲线和蓄电池SOC值变化曲线分别如图11、图12所示。蓄电池SOC在400 s附近达到最大值63.051%,在650 s附近SOC达到最小值54.205%。

图10 燃料电池输出功率曲线

图11 蓄电池输出功率曲线

图12 蓄电池SOC值变化曲线
4 结 论
(1)通过所设计模糊逻辑控制策略,在燃料电池和蓄电池满足游艇航行需求功率前提下,输出的功率均在额定输出功率范围内,并且燃料电池始终保持在高效输出区域。
(2)仿真结果表明,在所设计的模糊逻辑控制策略下,蓄电池始终保持较高的剩余电量,SOC值在55%~65%之间波动,仿真开始时蓄电池SOC值为60%,仿真结束蓄电池的SOC值为61.073%。
(3)本文根据燃料电池输出特性,建立以游艇航行需求功率和蓄电池SOC值作为模糊逻辑控制器输入,DC-DC变换器前端功率信号作为输出的模糊逻辑控制策略,能够实现游艇在各个工况下对航行需求功率的合理分配,同时保障了燃料电池和蓄电池较高的使用寿命。
[1] 于志民. 太阳能光伏系统在游艇上的应用探讨[J]. 机电信息,2012(24):42-43.
[2] 潘其永,朱子文,郑青榕,等. 典型船舶燃料电池推进系统研究[J]. 船舶工程,2016(4):35-38.
[3] NIELS J S, MUTASIM A S, NAIM A K. Energy Management Strategies for Parallel Hybrid Vehicles Using Fuzzy Logic [J]. Control Engineering Practice, 2003(1):171-177.
[4] Barabino G,Carpaneto M,Comacchio L, et al. A New Energy Storage and Conversion System for Boat Propulsion in Protected Marine Areas Clean Electrical Power[C]//2009 International Conference on Digital Object, 2009:363- 369.
[5] Zhang Bingzhan, Mi C. Charge depleting control strategies and fuel optimization of blended-mode plug-in hybrid electric vehicles[J]. IEEE Transactions on Vehicle Technology,2011(4): 1516-1525.
[6] 吕亦旸. 关于船舶UPS的容量计算[J]. 船舶,2015(1):90-94.
[7] 张邦基,于德介,邓元望.基于模糊逻辑的并联式混合动力电动汽车能量控制系统[J]. 汽车工程,2009(6):496-502.
[8] 孙彦琰,高迪驹,褚建新. 混合动力电动船舶模糊逻辑控制策略[J]. 船舶工程,2014(3):67-70.
Fuzzy logic control strategy towards hybrid power system of fuel cell yacht
ZANG Zhuang PAN Chao-feng CHEN Ning QIU Guang-ting
(School of Energy and Power Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
The fuel cell and storage battery are parallel connected to be used as the hybrid power system for the small yachts sailing in rivers and lakes. The corresponding fuzzy logic control strategy is designed to manage the energy. The hybrid power system of the fuel cell yacht and the fuzzy logic controller are modelled and simulated by MATLAB/Simulink. The simulation results show that the energy control in yacht sailing can be achieved by the hybrid power system and the fuzzy logic control strategy, thus meeting the requirements of energy conservation and emission reduction.
fuel cell; hybrid yacht; electric propulsion; fuzzy logic control
U665.13
A
1001-9855(2017)02-0065-06
10.19423 / j.cnki.31-1561 / u.2017.02.065
2016-11-11;
2016-11-24
臧 壮(1990-),男,硕士研究生。研究方向:船舶动力系统设计。潘朝峰(1959-),男,硕士,副教授。研究方向:轮机自动控制技术。陈 宁(1963-),男,硕士,教授。研究方向:船舶动力系统设计、船舶先进制造技术、企业信息集成等的研究。邱广庭(1991-),男,硕士研究生。研究方向:数字化设计与制造。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
小猕猴智力画刊(2022年3期)2022-03-29
小猕猴智力画刊(2022年3期)2022-03-28
太阳能(2022年2期)2022-03-07
环球时报(2021-05-31)2021-05-31
中学生数理化(高中版.高二数学)(2020年2期)2020-04-21
车迷(2017年12期)2018-01-18
科技视界(2016年18期)2016-11-03
航运交易公报(2015年17期)2015-05-27
汽车与新动力(2014年4期)2014-02-27